
基于改进粒子群算法的自适应构网型变流器控制策略
2024-03-15 13:52段玉朱子民王小云陈杰马健南东亮
广东电力 2024年2期
段玉,朱子民,王小云,陈杰,马健,南东亮
(1.国网新疆电力有限公司电力科学研究院,新疆 乌鲁木齐 830011;2.新疆电力系统全过程仿真重点实验室,新疆 乌鲁木齐 830011;3.新疆大学 电气工程学院,新疆 乌鲁木齐 830046)
新能源的快速发展是实现我国能源转型的关键驱动力。随着全球能源需求的不断增长和环境问题的日益突出,可再生能源作为一种清洁、可持续的能源形式,受到了广泛关注和重视。我国作为世界上最大的能源消费国之一,也积极响应全球能源转型的呼声。截至2020年底,我国可再生能源累计装机容量已经达到534.96 GW[1],这一数字预计到2050年将会增长60%[2]。
新能源发电设备接入电网时,需要借助电力电子变换器来实现与电力系统之间的能量交互。电力电子变换器可以将新能源发电设备输出的波动、不稳定电能转换为满足并网条件的电能,并且能够灵活控制电能的流动方向和功率。然而,随着大规模电力电子设备并网,电力系统的惯性和阻尼水平会进一步降低,给电力系统安全稳定带来严峻挑战。惯量和阻尼是电力系统中重要的稳定性指标,它们直接影响系统对外界扰动的响应能力和频率振荡的抑制能力[3]。传统电力系统的惯量主要由传统发电机组提供,当大规模电力电子设备并网时,系统的总惯量将会减少,导致系统对外界变化的响应速度下降,并且电力电子设备的阻尼能力有限,无法提供足够的阻尼来抑制频率振荡,进一步增大了系统失稳的风险[4]。因此,传统经由基于锁相环设计的跟网型控制变流器接入交流电网的新能源机组,在低惯量电网中可能造成电力系统失稳[4]。2016年9月28日新能源占比高达48.36%的澳大利亚南部电网发生大停电事故[5],2019年8月9日英国新能源机组脱网引发大面积停电事故[6]。为解决上述问题,国内外学者提出了构网型控制策略,其能够自行建立电压和频率,对电网的依赖较小,具有良好的弱电网稳定性。其中,虚拟同步发电机(virtual synchronous generator,VSG)作为典型的构网型控制策略发展最快[7-8]。2013年,中国电力科学研究院成功研制首台50 kW VSG样机;至今,国家电网已经在系统内开展了各场景的工程应用。VSG能够将储能装置作为能量来源,通过控制手段使其拥有阻尼和惯性特性,改善系统频率响应特性,增强微电网抗干扰能力。
新能源发电设备具备的工作模式有并网模式和孤岛模式。处于孤岛模式时,逆变器控制参数的不合理设计将危害微网的稳定性[9]。文献[10]研究了虚拟惯性控制,分析了微电网在采用这种控制策略时可能引起的功率振荡,并使用重新设计的固定控制参数减缓了这种振荡,但固定的控制参数仅在特定场景才有抑制作用。文献[11]通过分析同步发电机的功角特性,结合VSG控制,提出虚拟惯量可变的控制方法,实现了频率超调较小的快速动态响应要求。但其并未考虑阻尼系数的作用。文献[12]利用根轨迹法分析各控制参数的作用,提出了阻尼系数和虚拟惯量均可变的控制策略,但该策略并未将频率变换率纳入控制范围。同时,以上文献均未给出详细的参数选取办法。
针对上述问题,为提升电力系统的动态性能,充分利用构网型变流器参数灵活可调的优势,本文基于改进的粒子群算法,提出一种基于改进粒子群算法的新型构网型变流器自适应控制策略,通过仿真实验和根轨迹法,得到典型构网型变流器的虚拟惯量和阻尼系数在大扰动事件下对系统动态特性的影响;然后,研究典型构网型变流器的频率响应曲线与功角曲线,提出包含频率偏差和频率变化率的自适应构网型变流器控制策略;最后,通过改进粒子群算法对自适应控制策略涉及的全部参数进行整定。该方法充分利用了构网型变流器控制系统参数可调的优点,结合系统在不同时间尺度下对惯量和阻尼的需求不同的特点,提出自适应构网型变流器控制策略,与传统虚拟惯量控制增益和阻尼系数采用固定参数相比,可降低系统故障后频率的超调量,且能缩短系统的调节时间。针对传统自适应方法的自适应参数整定繁琐问题,本研究对粒子群算法进行适应性改进,利用迭代寻优的方法,准确、快捷地整定全部自适应参数,具有良好的发展前景。
1 典型构网型控制及其特性
VSG是典型的构网型变流器[13],本文将用其代替构网型控制进行具体研究。
1.1 VSG控制原理
VSG拓扑结构如图1所示。其中:iVSG为VSG的输出电流;iPCC为VSG与外电网公共连接点(point of common coupling,PCC)的电流;E为虚拟电势;θ为系统功角;L1、L2为电感;C为滤波器;U为新能源供能的直流电源;I1—I6为IGBT[14]。
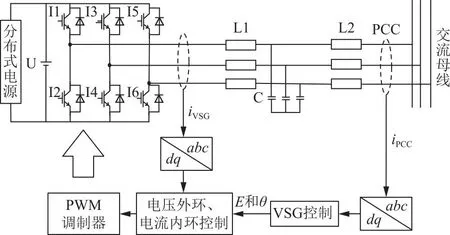
图1 VSG拓扑结构Fig.1 Basic topology of VSG
VSG的控制结构模拟同步发电机的数学模型,使其拥有阻尼和惯性特性。同步机二阶运动方程为[15-16]:
(1)
式中:D为阻尼系数;J为转动惯量;TD为阻尼转矩;Te为电磁转矩;Tm为机械转矩;Pm为机械功率;Pe为电磁功率;ω为角速度;ωN为额定角速度;t为时间。
基于同步机一次调频的原理,设计VSG的有功下垂控制如下:
Pm=Pref+K1(ωN-ω).
(2)
式中:Pref为VSG的有功给定值;K1为下垂调差系数。
1.2 虚拟惯量和阻尼系数对系统动态特性的影响
由式(1)可知,VSG控制使风力发电机、光伏发电机、储能电源具有与同步发电机相同的惯性和一次调频特性。

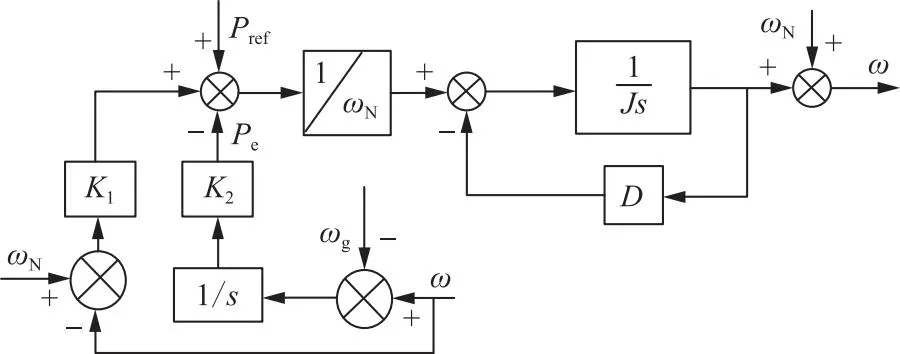
图2 VSG有功控制Fig.2 Active control of VSG
由图2可以得到VSG输出有功功率的闭环传递函数G(s)[17]。
(3)
从式(3)可知VSG的输出有功功率与给定有功功率Pref、角速度的差值(ωN-ωg)有关。因此,输出功率与给定功率的闭环特征方程为
(4)
则自然振荡角频率ωn和阻尼比ξ分别为:
(5)
实际应用中,常用的动态性能指标多为超调量σ和调节时间ts[18]。σ计算式为
(6)
式(6)表明,σ与ξ呈反比关系,ξ越小,σ越大。
ts很难用ωn和ξ准确描述,当选取误差带为5%[18]时,ts的近似表达式为
(7)
从式(6)、(7)可知,有功控制环节为典型二阶模型,其动态性能可由J和D决定。
J和D依次保持不变时,另一参数值对系统频率的影响如图3所示。
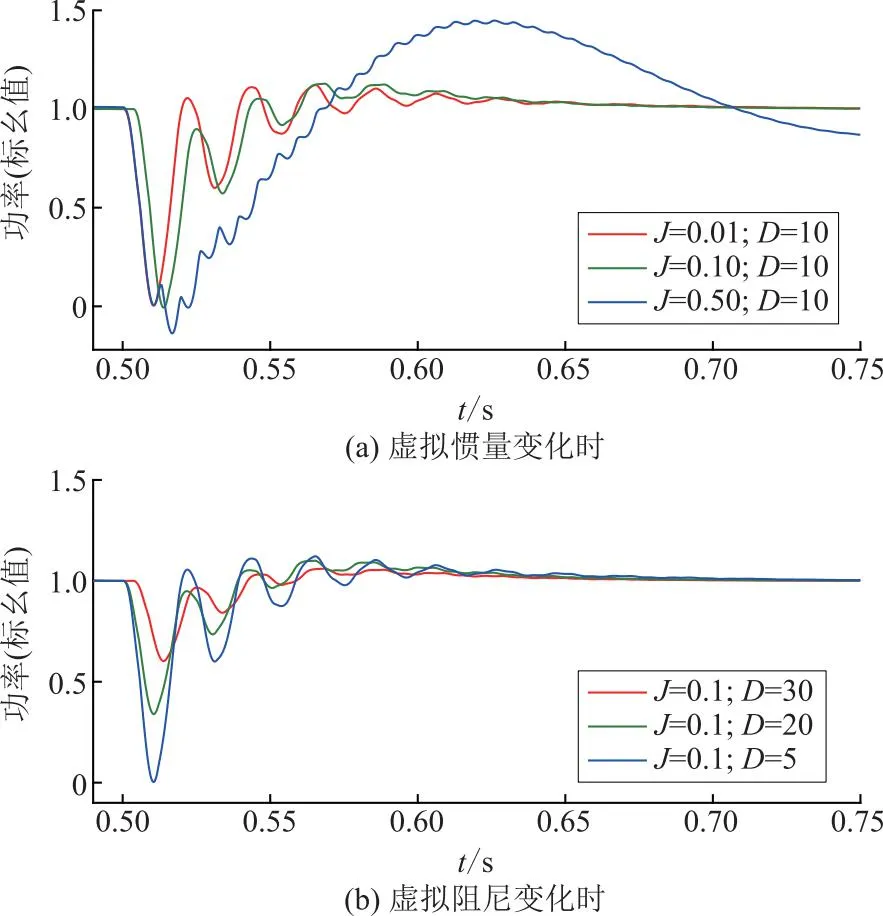
图3 VSG有功变化Fig.3 Active changes of VSG
由图3(a)可知,当D恒定、J增大时,输出有功功率震荡速度减缓,但此时有功变化的超调增大,说明转动惯量主要对变化率有较大的影响。由图3(b)可知,当J恒定、D增大时,输出有功功率变化的超调减小,达到峰值与稳态的时间缩短。因此,过大的D值会使系统响应变慢,但是适合的D值将改善系统响应的震荡幅度。
为了更清晰地分析有功控制环中的控制参数对VSG控制系统性能的影响,基于式(4)的有功控制环闭环特征方程,对含J、D参数的闭环系统进行根轨迹分析,图4为其根轨迹图。
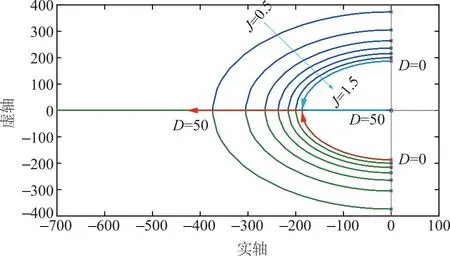
图4 有功控制环根轨迹图Fig.4 Root trajectory diagram of active control loop
由图4可看出,式(4)描述的有功控制环闭环特征方程有1对共轭特征根。并且,由图4可以验证上文关于控制参数对系统动态特性影响的结论:当虚拟惯量保持固定时,随着阻尼系数的增大,系统的超调量减小,调整时间变长;当阻尼系数保持固定时,随着虚拟惯量的增大,有功闭环的极点逐渐靠近原点,即闭环系统的响应速度减慢,同时由特征根的虚部减小可知系统的频率变化更加平缓。然而,当设置过大的虚拟惯量时,有功闭环的极点会离原点过近,从而导致VSG并网稳定性变差。
2 改进的自适应控制
2.1 参数自适应控制
由式(1)可得:
(8)
由式(8)可知,增加J、D可以减小系统的Δω和dω/dt,从而增加系统的稳定性。因此,在系统遭受扰动时,对J、D适当调整即可减缓频率的变化。
当发生扰动时,VSG功角特性曲线与输出频率曲线如图5所示,其中,θ1、θ2、θ3为依次增大的发电机功角,P2、P0、P1为发电机在θ1、θ2、θ3分别对应的有功功率。为便于进行分析,此处J、D均为固定值。振荡过程分为4个区域:区域Ⅰ,t1—t2;区域Ⅱ,t2—t3;区域Ⅲ,t3—t4;区域Ⅳ,t4—t5。
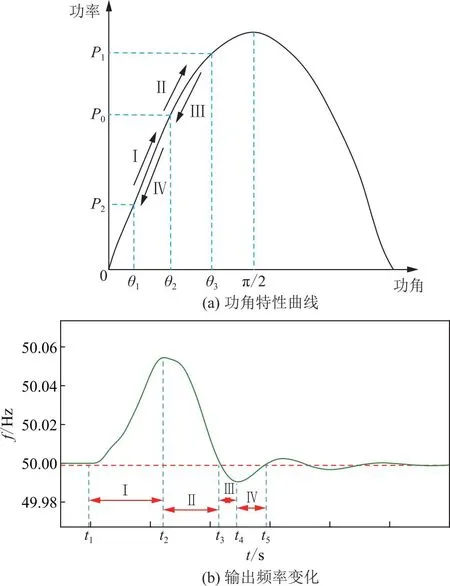
图5 VSG特性曲线Fig.5 Characteristic curve of VSG
区域Ⅰ:此时VSG输出频率超过VSG给定频率且dω/dt>0。由1.2节可知,为使dω/dt尽快降为0,应增大J以抑制频率的快速增长,同时适当增大D以减小频率的超调幅值。
区域Ⅱ:此时VSG输出频率依然超过VSG给定频率且dω/dt<0。由1.2节可知,应减小J以使频率尽快到达最大值,同时应减小D以避免过大的阻尼抵消J的作用。
区域Ⅲ、区域Ⅳ:J与D的调整规则类似于前2个阶段。
全时段J、D的自适应整定原则见表1,其中Δf=f-fref,f为系统频率,fref为系统参考频率。
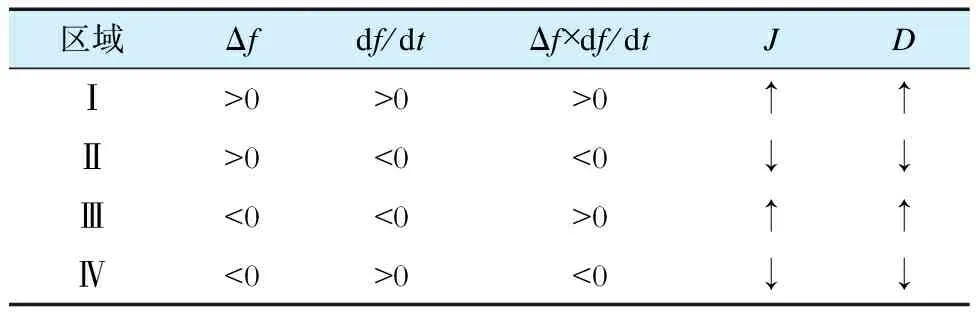
表1 不同阶段参数自适应整定原则Tab.1 Principle of adaptive tuning of parameters in different stages
基于各个阶段J、D的不同需求,设计的分段线性自适应控制函数如下:
(9)
(10)
式中:J0、D0分别为J、D的稳态值;Ci(i=1,2,…,8)为自适应调节系数;a为频率偏差阈值,取0.1;b为频率的速率偏差阈值,取1[19]。
2.2 自适应参数整定
由式(9)、(10)可知,所提出的VSG自适应控制方法有较多参数需要整定,本文对粒子群算法的学习因子进行改进,利用改进后的粒子群算法对式(10)涉及的J0、D0、Ci(i=1,2,…,8)参数进行寻优。
2.2.1 适应度函数设计
作为收敛的唯一依据,适应度函数决定着收敛速度以及能否找到最优解。误差绝对值与时间乘积的积分(integrated timeabsolute error,ITAE)是判断误差大小的常用函数,故本文采用ITAE作为优化目标,并选取VSG输出频率偏移绝对值作为反应系统性能的指标。ITAE的值
(11)
2.2.2 学习因子改进
学习因子V1、V2决定粒子间信息共享的程度。在算法前期需要较强的全局搜索能力,而在后期则需要较强的收敛能力[20]。因此,本文的学习因子设计如下:
(12)
式中:Imax为迭代次数的最大值;I为当前迭代次数;Vstart为学习因子的初始值;Vend为学习因子的最终值。
综上所述,本文设计的VSG参数自适应算法流程如图6所示,其中i为粒子编号,imax为粒子群规模。
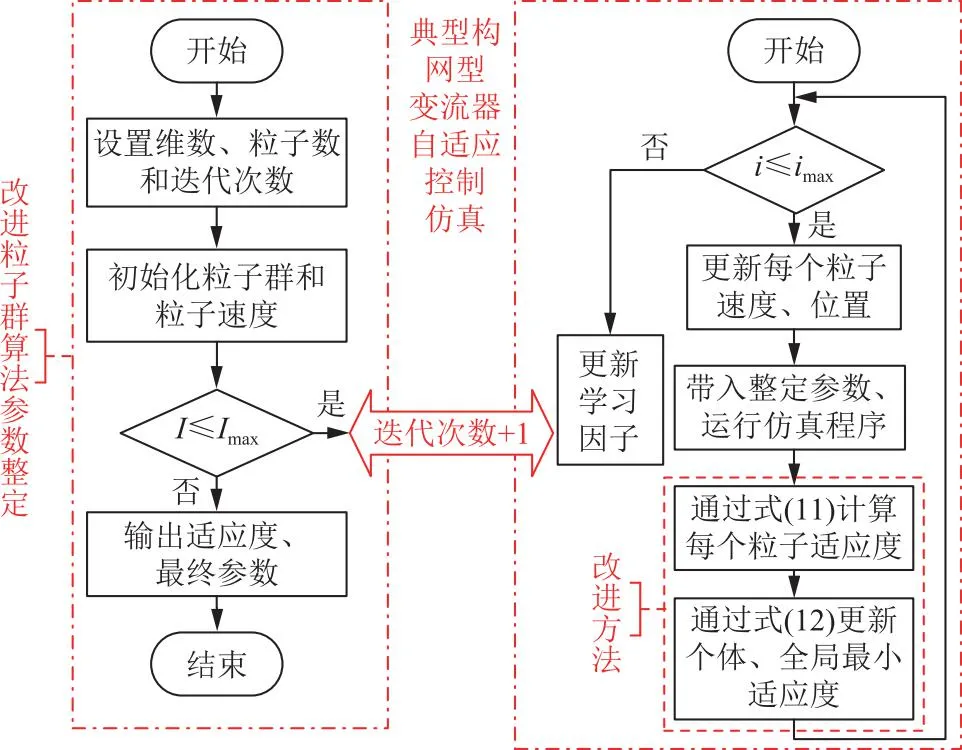
图6 VSG参数自适应算法流程Fig.6 Flow chart of VSG parameter adaptive calculation
具体步骤如下:
步骤1,前期准备。①设置粒子群算法维数、粒子群规模imax、最大迭代次数Imax;②通过随机赋值的方法初始化粒子和粒子速度。
步骤2,迭代寻找最优参数组合。①当粒子i≤imax时,更新每个粒子的速度、位置,并计算每个粒子的适应度;②通过与现有适应度比较,更新个体适应度及全局最小适应度,并记录它们的参数组成;③当i>imax时,进入下一迭代,并重复①、②步骤。
步骤3,输出结果。当I>Imax时,输出最终的参数组合。
3 案例分析
3.1 仿真实验设置
在MATLAB/Simulink仿真平台中搭建如图7所示的微电网模型,相关参数见表2。
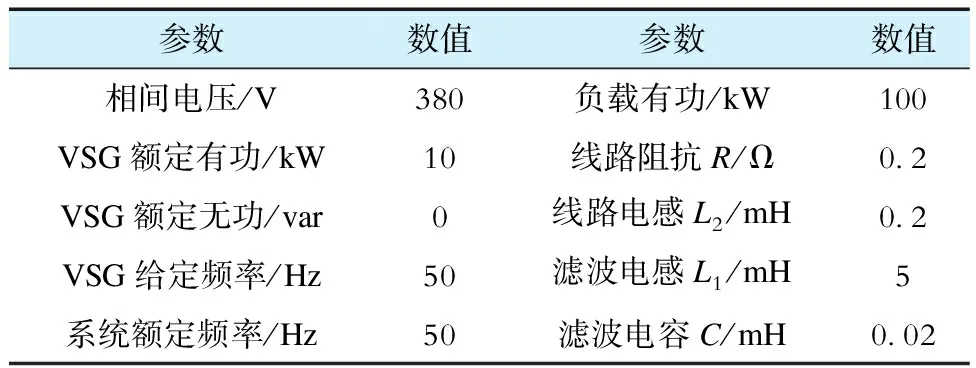
表2 仿真参数Tab.2 Simulation parameters
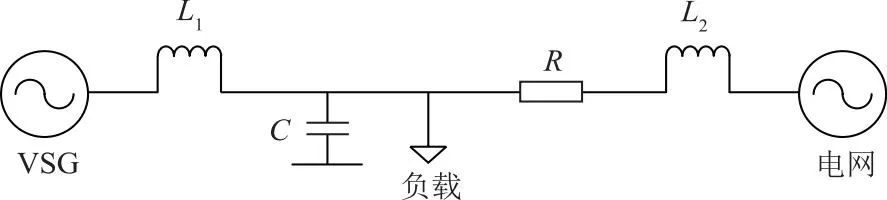
图7 仿真模型Fig.7 Simulation model
为避免仿真平台初始化时由于数值问题带来的误差影响,本文实验均在仿真平台稳定后进行。粒子群算法规模为50,迭代次数为25,仿真时长为2.4 s。
设置3种突发事件:
事件1,在t=1 s时系统的负荷突增10 kW有功功率;
事件2,在t=1.4 s时系统突然丢失1个有功功率为10 kW的负荷;
事件3,在t=1.8 s时VSG接到调度指令,提高5 kW功率输出。
为检验改进算法整定结果的准确性与鲁棒性,本节先在事件1进行参数整定,再将整定后的参数运用到其他2种事件中。
设置2组对照实验:
实验1,采用固定J和D,其中固定J设为0.1,固定D设为10[21];
实验2,采用本文所提自适应控制方法。
3.2 仿真结果
图8为粒子群算法的适应度函数曲线。相较于迭代时间长、收敛慢的传统粒子群算法,改进后的粒子群算法适应度在第8次迭代后开始大幅下降,并在第10次迭代达到稳定。这说明对于VSG自适应控制策略的众多待整定参数,相比于较为繁琐的传统计算方法[11-12],粒子群算法更加高效。参数整定见表3。
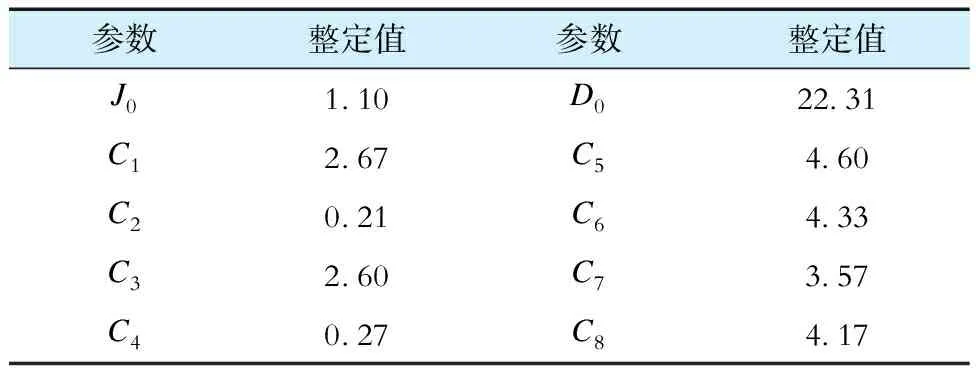
表3 参数整定结果Tab.3 Parameter setting results
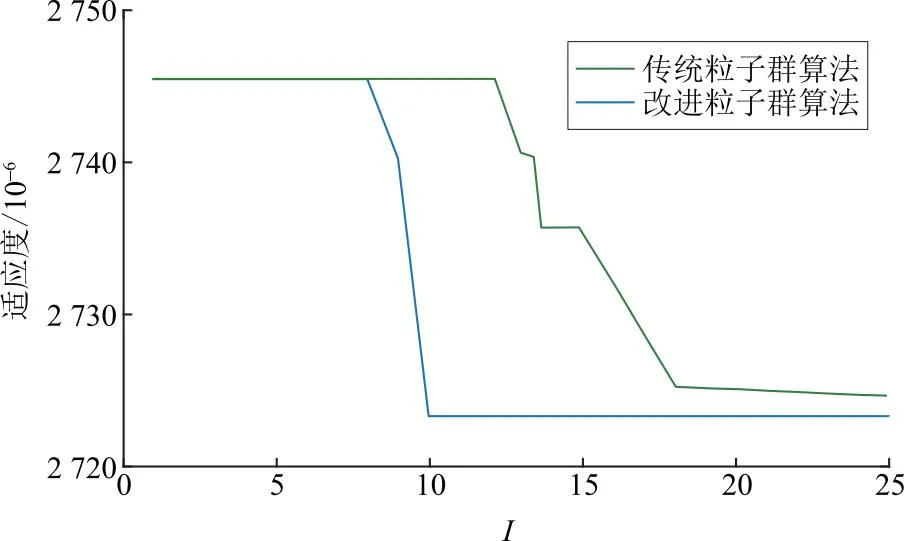
图8 适应度曲线Fig.8 Fitness curves
运用在事件1整定的参数,3种突发事件下VSG输出频率的变化如图9所示。
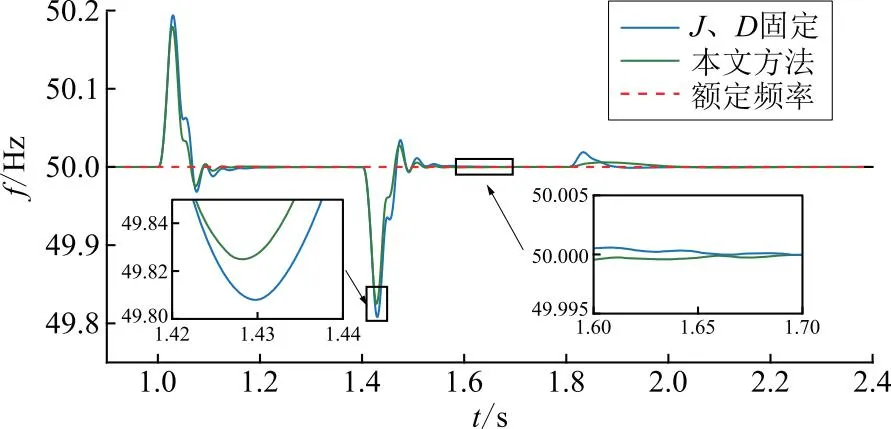
图9 不同事件下VSG输出频率变化Fig.9 VSG output frequency changes under different events
由图9可知,利用改进粒子群算法对所提出的自适应控制涉及参数进行整定是普遍适用的,证明本文方法的整定结果具有鲁棒性。同时,由图9可以看出,使用J、D固定参数时,VSG输出频率的超调量和稳定时间均大于本文方法。
仿真结果表明,相比于传统的J、D固定参数,本文提出的控制策略能够有效改善系统的动态响应。
4 结论
本文分析了构网型变流器原理以及虚拟惯量和阻尼系数对其输出频率和功率动态特性的影响,提出了一种自适应构网型变流器控制策略,可用于优化其动态性能。基于构网型变流器功角曲线和输出频率特性,设计了转动惯量、阻尼系数自适应控制策略,再通过改进的粒子群算法整定该策略的所有参数,即可实现构网型变流器的自适应控制。通过对控制策略机理和算例仿真的分析,得出如下结论:
a)本文提出的控制策略可采用改进的粒子群算法进行参数整定,提供了一种可行、有效的控制参数整定方法。
b)本文提出的控制策略通过动态过程中的参数自适应调节可以提升构网型电源电网频率主动支撑能力。
猜你喜欢
现代电力(2022年2期)2022-05-23
电子测试(2018年15期)2018-09-26
中国惯性技术学报(2018年1期)2018-05-10
重庆理工大学学报(自然科学)(2017年5期)2017-06-29
自动化学报(2016年8期)2016-04-16
电测与仪表(2016年8期)2016-04-15
通信电源技术(2016年4期)2016-04-04
西北工业大学学报(2015年1期)2016-01-19
中北大学学报(自然科学版)(2015年6期)2015-12-02
哈尔滨师范大学自然科学学报(2015年6期)2015-04-23
