遥感卫星在侧视和偏航导引模式下太阳帆板光照角变化分析
2024-04-02 03:42姜婷婷李瑞琴康永鹏仲兆宇
现代电子技术 2024年7期
白 勇,姜婷婷,李瑞琴,康永鹏,仲兆宇
(上海卫星工程研究所,上海 201109)
0 引 言
太阳同步轨道是最常用的卫星轨道,其特点是轨道平面法线与太阳方向在赤道平面的投影之间的夹角保持不变。这样可以保证寿命期间整个卫星光照角和阴影时间变化幅度维持在较小的水平,便于整星热控和电源系统设计[1]。对于主动遥感成像方式的卫星,载荷工作时整星姿态在滚转轴上偏移一定角度,偏航角随着卫星当前在轨道上的幅角变化而变化,通常滚转角保持在30°~40°之间,偏航角在±5°之内循环摆动[2-4]。
卫星姿态机动会使光照角产生周期性变化,变化周期为轨道运行周期。影响程度随太阳光线直射纬度、轨道降交点地方时等因素的不同而有很大差别,给电源系统设计带来了计算上的困难。本文提出了一种针对主动遥感成像卫星工作时姿态机动条件下光照角的计算方法,综合分析光照角影响因素及其数学关系式,得出影响程度分析结论。
1 本文所用坐标系定义
根据太阳同步卫星的轨道平面进动角速度与地球公转的角速度相等的特性,引入以下坐标系进行分析求解。
1)地心赤道坐标系
2)地心轨道坐标系
以地心为原点,坐标轴Oeozeo指向卫星轨道面法线方向,Oeoxeo轴指向卫星轨道升交点方向,Oeoyeo轴与前者构成右手正交坐标系。
3)卫星轨道坐标系
以卫星质心为坐标原点,坐标轴Oozo指向地心方向,Ooxo在轨道平面内垂直于Oozo轴,指向卫星运行方向,Ooyo轴与前者构成右手正交坐标系。
4)卫星本体坐标系
以卫星质心为坐标原点,三个坐标轴分别为卫星本体的惯性主轴,本文为方便分析,规定在卫星姿态角全为零时卫星本体坐标系与卫星轨道坐标系重合。
红松种籽衣中含有较为丰富的蛋白质和糖类[10],在烘焙过程中伴随着美拉德反应(非酶褐变)和焦糖化反应的进行,结果生成黑色素,是烘焙过程中种籽衣颜色逐渐加深的原因,即L*值、a值、b值大幅度降低,烘焙30 min后,由于蛋白质和糖类逐渐被消耗,非酶褐变反应速度减慢,因而颜色变化程度降低。项惠丹等[25]研究表明美拉德反应生成的黑色素具有抗氧化活性,且与反应物浓度和反应时间有一定的量效关系,这也是烘焙过程中各指标变化不规律的原因。
5)太阳帆板安装坐标系
以卫星质心为坐标原点,根据帆板驱动轴在卫星本体坐标系的指向矢量确定三个坐标轴的指向,坐标系建立原则以尽可能与本体坐标系重合和接近,使转换矩阵结构尽可能简单。本文将驱动轴指向本体坐标系y轴方向,x轴与本体坐标系x轴重合。
全年当中太阳直射点照在平太阳地方时12 点钟方位,直射点纬度在南北纬23.5°之间变化,由于地心赤道坐标系x轴永远指向赤道与晨线交点,即常说的6 点钟方位,则光线矢量垂直于x轴,在此坐标系Oexeyeze上的单位矢量为:
式中L为当前平太阳直射的纬度,定义北纬为正角度。
2 太阳帆板运动状态
太阳同步卫星根据轨道升交点赤经和任务需求确定太阳帆板安装位置,通常6 点钟附近轨道卫星的帆板驱动轴接近飞行方向,即本体坐标系的x轴;靠近12 点钟轨道的卫星帆板驱动轴安装方向接近y轴,并有驱动机构控制其转动,以使光照角最优[1,5]。帆板旋转角速度由轨道运行周期确定,保证飞行一圈帆板旋转一周。
太阳帆板偏转角度ρ由式(2)确定:
式中:ρ0为卫星运行于升交点时,帆板的初始偏转角度;ω为卫星在轨道上的幅角;F(ω)为关于幅角ω的帆板驱动机构偏转角度的控制函数。根据升交点地方时、平太阳直射点、太阳帆板安装位置、卫星姿态和轨道参数,确定太阳帆板初始偏转角度,以保证光照角最优[6-7]。
本文定义太阳帆板驱动轴平行于卫星本体坐标系的y轴,帆板法线正方向指向贴有太阳电池片的背侧,当帆板偏转角度为0°时,法线与卫星本体坐标系+z轴平行。由此得到,当帆板偏转角度为ρ时,帆板法线在卫星太阳阵安装坐标系Osxsyszs上的方向向量为:
3 帆板安装位置的坐标系转换
为计算太阳直射矢量和太阳帆板法线的夹角,需把二者转换到同一坐标系下解算。坐标系之间的转换可以通过姿态矩阵、欧拉轴角和四元数进行解算,后两种算法虽然没有复杂的三角运算,计算过程不会出现奇点,但计算算子没有实际意义,角度转换不直观,在坐标转换过程中角度和矢量的解算会引入大量无关参数,造成公式更加复杂,因此本文采用姿态矩阵算法[8-9]。
本文假设卫星的任何姿态机动不会对太阳电池阵产生任何遮挡,定义轨道倾角为i;卫星幅角为ω,在升交点时刻幅角为0;在地心赤道坐标系xOy平面上,从地心指向格林尼治时间早上6 点钟子午线的方向沿顺时针方向到卫星轨道升交点方向的转角为Ω。
设定坐标转序为z-x-y顺序,卫星本体相对于轨道坐标系有姿态偏转,x、y、z轴上姿态角分别为ψ、θ、φ,根据姿态转移方程可得从卫星轨道坐标系到本体坐标系的转移矩阵:
从地心轨道坐标系到卫星轨道坐标系偏转方式如图1 所示。沿原坐标系的z轴偏转角度ω,再沿x轴左旋90°,可以得到新坐标,则二者转移矩阵为:

图1 地心轨道坐标系和卫星轨道坐标系关系
从地心赤道坐标系到地心轨道坐标系偏转方式如图2 所示。
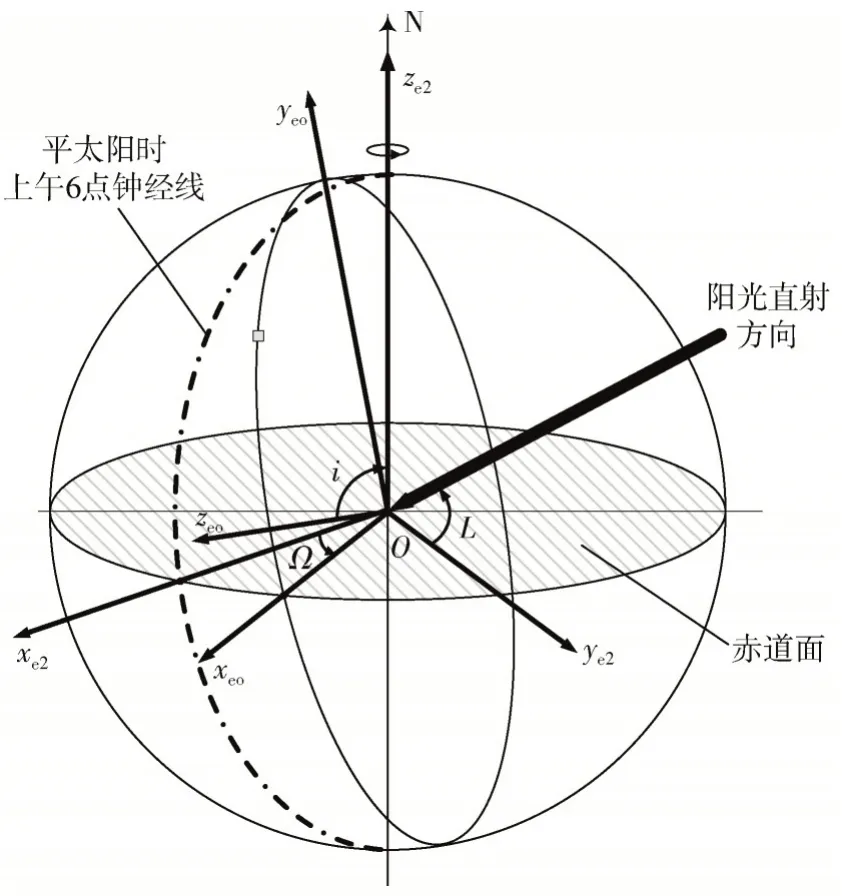
图2 地心轨道坐标系和地心赤道坐标系关系
对太阳同步轨道来说,轨道面相对地心赤道坐标系保持不变,即赤道上6 点钟位置到升交点转角Ω保持不变,原坐标系先沿z轴偏转角度Ω,再沿x轴偏转角度i,即轨道倾角可得到新坐标系。
由此得出转换矩阵:
通过坐标转换,直射光线矢量在卫星本体坐标系下矢量为:
光线和太阳阵法线夹角为α,帆板有光线照射时,cosα<0,否则帆板背对太阳。转换矩阵和法线矢量的模均为1,可以保证两矢量的积等于夹角余弦值,即:
当不考虑太阳阵倾斜安装和卫星本身姿态机动时,同时公式(2)中F(ω) =ω,得出以下计算结果:
式中:i、Ω和轨道参数有关,为定值,太阳直射纬度在一圈当中基本保持不变,也可认为是定值。可以看出在卫星无姿态机动和太阳阵偏置安装条件下,驱动机构匀速旋转时,cosα为常值,即帆板光照角度不变,光照角仅和帆板初始角位置有关。当轨道一定时,为保证太阳电池阵接收光照角最好,即式(9)计算值最大时为:
此时太阳帆板初始转角ρ0满足以下关系式:
4 姿态机动条件下的坐标系转换
主动遥感成像卫星通常在偏航和滚转方向存在姿态机动,主要影响从轨道坐标系到卫星本体坐标系的转换矩阵[5]。侧视通过卫星滚转角偏置一定角度实现,通常为固定值,而偏航角由于偏航导引的存在导致时刻变化。当卫星轨道为圆轨道时,偏航角和轨道幅角关系如下[10-12]:
式中:φ为偏航角度;ω为卫星当前所在的轨道幅角;i为轨道倾角;ωs为卫星轨道角速度;ωe为地球自转角速度。
滚转角和偏航角转移矩阵为:
代入公式(7),通过Matlab 仿真得到单圈光照角变化曲线。
通常为便于姿控系统控制,帆板初始转角按照公式(2)进行解算,当太阳帆板在一圈当中随卫星所在幅角线性变化时,单圈光照角在时刻变化。
5 仿真结果
对某遥感卫星帆板光照角进行仿真,轨道平均高度为516 km,地球平均半径为6 371.004 km,相应的太阳同步轨道倾角为97.435 5°,升交点地方时为22:30,帆板升交点转角按照公式(11)进行控制。
卫星轨道角速度按照式(14)进行计算:
式中μ为地球引力常数,μ= 3 986 000.5 km3/s2。
卫星右侧视30°,同时为补偿光照角偏移,帆板驱动轴沿x轴偏移不同角度安装,分别仿真阳光直射0°、20°N、20°S 时单圈光照角变化情况。
5.1 无偏航导引模式下光照角变化
在无偏航导引条件下,帆板安装轴沿卫星本体坐标系x轴进行不同角度偏置,以减少光照角,光照角变化如图3~图6 所示。
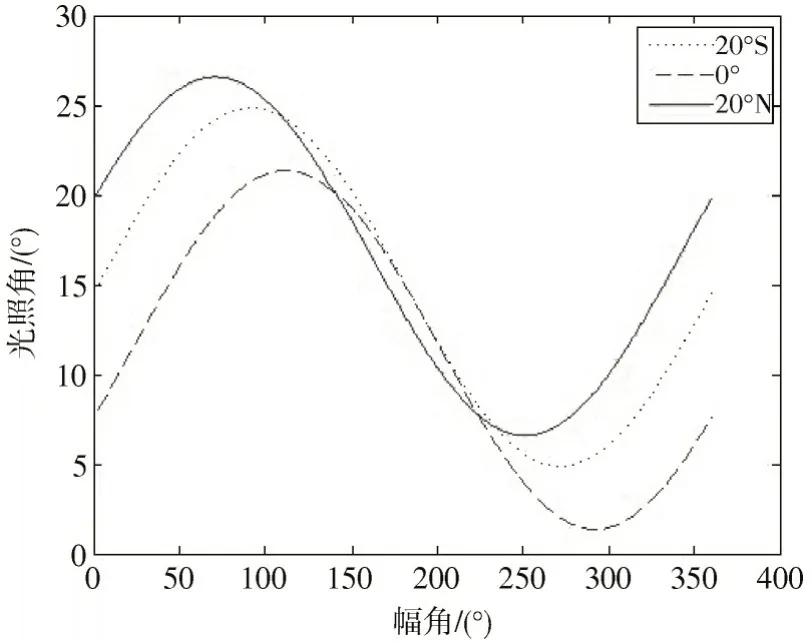
图3 无偏航导引时不同直射纬度时光照角变化(帆板安装角沿x 轴正偏置40°)

图4 无偏航导引时不同直射纬度时光照角变化(帆板安装角沿x 轴正偏置30°)

图5 无偏航导引时不同直射纬度时光照角变化(帆板安装角沿x 轴正偏置15°)

图6 无偏航导引时不同直射纬度时光照角变化(帆板安装角沿x 轴正偏置0°)
本文定义升交点为0°幅角,当卫星轨道升交点地方时为22:30时,大致在90°~270°范围内为光照期。从图3~图6中看出,卫星侧视工作时,通过帆板安装轴偏置,对光照角产生了影响,右侧视30°时,帆板反偏置30°安装,抵消了光照角偏差,使得光线与帆板法线夹角基本保持不变。偏转至其他角度时,光照期总的光照通量相差不多,但光照角变化较大,不利于电源系统设计。
5.2 偏航导引模式下光照角变化
偏航导引使得卫星光照角一圈当中变化范围较大,通过调整帆板安装轴偏置角度,实现对光照角的优化,光照角变化如图7~图10 所示。
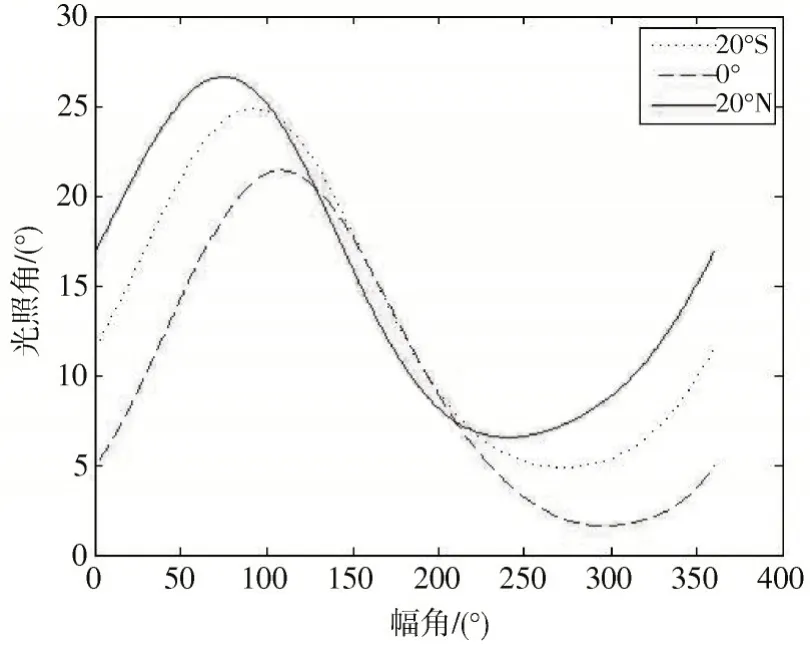
图7 有偏航导引时不同直射纬度时光照角变化(帆板安装角沿x 轴正偏置40°)

图8 有偏航导引时不同直射纬度时光照角变化(帆板安装角沿x 轴正偏置30°)

图9 有偏航导引时不同直射纬度时光照角变化(帆板安装角沿x 轴正偏置15°)
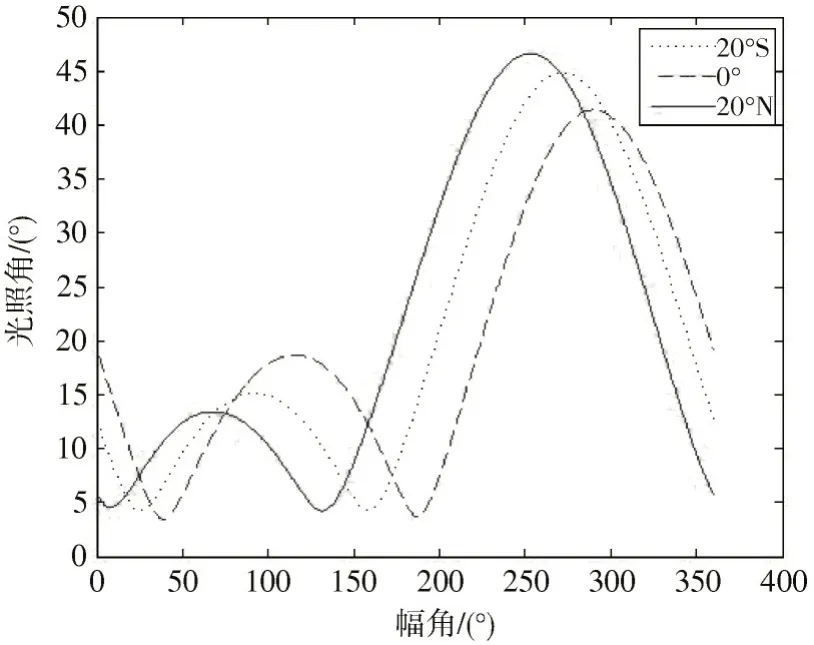
图10 有偏航导引时不同直射纬度时光照角变化(帆板安装角沿x 轴正偏置0°)
光照期卫星幅角大致在90°~270°范围内,从图7~图10 中看出,当偏置角与侧视角方向相反、大小相等时光照条件最好,而且在光照期角度正好处于波谷。偏置成其他角度时,总光通量基本不变,但光照角变化剧烈,反而不利于电源系统工作。
6 结 论
偏航导引和侧视是遥感成像卫星特有的工作模式,对帆板光照角有较大的影响。本文结合帆板驱动轴安装角和姿态机动因素对光照角的影响,对太阳同步遥感卫星帆板光照条件进行分析。在实际卫星设计中,通常姿控系统为方便整星操纵,对帆板采取了开环控制方式,即按公式(2)所表达的帆板偏转角[13]。综合全文得出以下结论:
1)在有偏航导引和侧视模式下工作的卫星,单圈光照角随着偏航角变化而改变,变化曲线近似为正弦。
2)在侧视角与帆板驱动轴偏置角度大小相等、方向相反的条件下,单圈光照角变化最小,最有利于电源系统设计。
3)光线直射纬度变化对光照角有直接影响,不同轨道条件下对光照角的影响幅度有很大不同,针对不同对象需要具体分析。
猜你喜欢
哲学分析(2023年4期)2023-12-21
汽车实用技术(2022年15期)2022-08-19
中国信息化(2022年5期)2022-06-13
新教育时代电子杂志(教师版)(2022年31期)2022-02-09
中国音乐学(2020年4期)2020-12-25
北京航空航天大学学报(2016年6期)2016-11-16
文学教育(2016年27期)2016-02-28
空间控制技术与应用(2015年4期)2015-06-05
发明与创新(2015年33期)2015-02-27
电子设计工程(2014年19期)2014-02-27