
水下天空偏振光视频采集实验装置设计与应用
2024-04-18 03:50郭银景杜春晓阮耀煌石浩辰
实验室研究与探索 2024年1期
郭银景, 杜春晓, 孔 芳, 阮耀煌, 石浩辰
(山东科技大学a.电子信息工程学院;b.电气与自动化工程学院,山东青岛 266590)
0 引 言
随着导航技术的发展,生活各方面对导航需求日益增加,同时对导航的精确度、抗干扰能力有了更高的要求。受螳螂虾[1]、沙蚁[2-3]等动物利用自然环境中的偏振光辨别方位的启发,偏振光导航[4-5]已经成为研究热点。太阳光经过大气散射形成天空光,再经过水面折射和水分子散射,在阳光能够穿透的海洋深处偏振分布模式依然具有一定规律[6]。通过偏振相机或者附加偏振片的相机采集天空偏振分布,并通过一定算法计算方位信息。由于偏振光是地球本身自带的天然特性,该导航方式具有不易受外界干扰、成本低、误差不随时间累积等优点,因此将偏振导航应用于水下具有重要意义。根据需求设计一种能够放在水底并能够长时间稳定采集天空偏振信息的装置,对水下偏振光分布进行偏振方向解算[7],判断当前所处的位置与方向,为水下偏振导航提供理论基础。
2018 年,Powell 等[8]进行水下偏振地理定位测试,精度达到每6 km 仅1 m 的误差。2019 年,Dupeyroux等[9]受沙漠蚂蚁导航行为启发,提出了一种像蚂蚁一样回家的六足机器人(见图1(a)),并设计了一个源点偏振计,但在水下受到波浪影响后,偏振分布图包含信息量少。2020 年,Yang 等[10]提出一种水下太阳跟踪算法,提高了水下偏振光导航精度。2021 年,田连标[11]搭建了一种简易的水下天空偏振探测装置(见图1(b)),获取了实际水下偏振分布模式图。2022 年,Hu 等[12]设计了一种成像旋光仪系统(见图1(c)),并开发了基于Snell窗内的水下折射-极化模式太阳跟踪算法,进一步提高了水下偏振光导航精准性。2023 年,Bai 等[13]设计了如图1(d)所示的全方位偏振摄像机,对摄像数据进行深度神经网络训练。
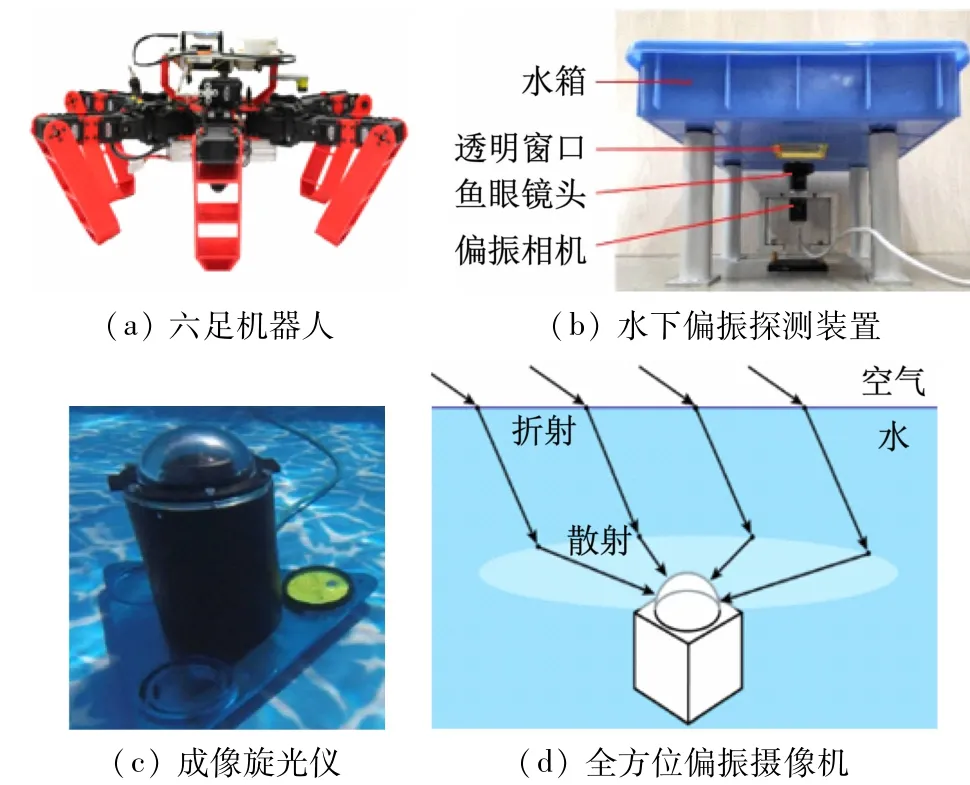
图1 4种偏振采集装置
以体积小、成本低以及实用性为目的,搭建水下天空偏振光视频采集实验装置,并对装置进行密封防水,使其能够长时间在水底正常采集数据,获得水下偏振分布模式,从而得到太阳方位的准确信息。
1 天空偏振分布模型
1.1 大气偏振分布模型
光波与大气中的各种粒子碰撞,产生了大气偏振现象。天空偏振光的分布包含大量信息,可以确立航向角、大气偏振角与太阳位置的关系,计算出太阳矢量的绝对方位来实现导航。
一束光的电场E与磁场B垂直于传播方向,并且电场与磁场垂直,又因为磁场与电场之间存在一定关系,因此可以用电场E来描述一束光波的特性[14]。以一般的椭圆偏振光为例,其偏振光状态由电场在x、y轴上的分量以及相位差δ 决定,常用斯托克斯(Stokes)矢量[15]表示,偏振光的传输矩阵则用穆勒矩阵表示。
斯托克斯矢量是由4 个参量组成的四维矢量,从偏振相机获取0°、45°、90°和135° 4 个通道的光强值I0°(x,y)、I45°(x,y)、I90°(x,y)和I135°(x,y),则斯托克斯的4 个参量可以表示为:
式中:I为光强;Q为0°与90°方向线偏振光强度之差;U为45°与135°方向线偏振光强度之差;V为左旋与右旋圆偏振光强之差。天空光经过偏振片后为线偏振,圆偏振几乎为零[16]。
由斯托克斯的4 个参量计算得到偏振角(α)和偏振度(D),计算式分别为:
生成图像坐标系,将大小为(w×h)图像的坐标原点从左上角平移到图像中心点,即:
然后生成载体坐标系下的方位角φp,计算式为
最后计算E与太阳子午线的夹角α1,计算式为
1.2 水下偏振分布模型
空气中应用的太阳跟踪模型在水下无法实现,因此分析水对入射光的影响机理,建立水下环境的太阳跟踪模型。从水下向上观察,由于水的折射效应,水面以上的视野范围被压缩到一个锥形区域,即Snell 窗口。Fresnel提出了菲涅尔公式,描述了天空光入射水面发生折射的偏振特性,此折射过程表示为
式中:Si为入射光的斯托克斯矢量;St为折射光的斯托克斯矢量;MR为穆勒矩阵。MR的计算式为
式中:θi为入射光天顶角;θt为折射光天顶角。若空气与水之间的折射比为1.00∶1.33,则θi与θt之间的关系表示为
2 实验系统设计
根据实验装置对透光率、密封防水、材料防腐蚀等方面的要求,选取合适的材料和器件,并分析可行性、实用性及实现难易程度。图2 为实验装置的整体设计,防水外壳由玻璃顶罩、防水垫、法兰、底部圆筒容器组成,通过焊接、固定螺丝挤压防水垫等方式达到防水效果,偏振相机、工控机等硬件位于防水外壳内部,在密闭防水的环境中采集并存储数据。

图2 天空偏振分布实验装置
2.1 防水外壳设计
2.1.1 玻璃顶罩
玻璃顶罩的材料要满足透光率高,能够耐受一定水深的压强,因此采用亚克力有机玻璃。亚克力具有与玻璃相似的透明度,能够传递大部分可见光,满足相机拍摄对玻璃罩透光率的要求。
如图3(a)所示,利用亚克力易于黏结的性质,把亚克力与钢圈黏结成一体。玻璃顶罩边缘均匀分布16 个螺孔,孔径大小为10 mm,与底部圆筒容器上的螺孔相对应。玻璃顶罩上部透明半圆部分与边缘圆环内径相同,为φ 308 mm,边缘圆环外径为φ 415 mm。

图3 防水外壳部件分解图
2.1.2 底部圆筒容器设计
底部圆筒容器首先应能够容纳工控机等器件,其次应能够沉入水底。底部圆筒容器采用优质的碳钢材料,并且涂上防腐涂层,保证长时间在水底而不被腐蚀,适用于各种工业领域及水下环境,如图3(b)所示。
圆形法兰是一种常见的管道连接件,在本装置中,法兰作为中间介质,上部通过16 颗M10 螺丝与玻璃顶罩连接,下部直接将法兰与底部圆筒容器焊接在一起,再使用防水垫片来确保连接处的密封性。如图4所示,圆形法兰外径φ 415 mm、内径φ 308 mm、厚度10 mm,边缘均匀分布16 个螺孔,与玻璃顶罩上的16个螺孔相对应,孔径为10 mm,孔心距离边缘12.5 mm。法兰中部有2 道凹槽,便于防水胶垫的固定。凹槽1内径φ 347 mm,外径φ 355 mm,宽度8 mm,深度2 mm;凹槽2 内径φ 329 mm,外径φ 337 mm,宽度8 mm,深度2 mm。法兰与玻璃顶罩外围之间的强大压力挤压胶垫,防止液体渗透到容器内部,以免烧坏相机、工控机和时控器等硬件设备。
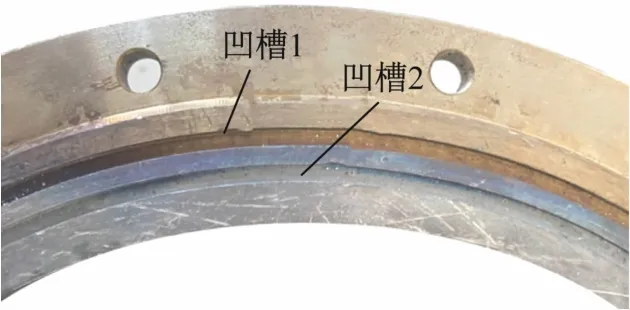
图4 法兰局部细节构造
2.1.3 万向环设计
采集天空偏振信息时需要保证偏振相机镜头竖直朝向天空并不受防水外壳的视线遮挡,因此采用万向环与3D打印的偏振相机项圈结合的方式。如图3(c)所示,万向环分为外圈和内圈,外圈通过2 个柱子固定在底部圆筒容器上,内圈则通过2 个柱子插过外圈上的螺母孔,内圈可以任意角度转动。偏振相机可以分为上下两部分,上半部分为镜头,下半部分为图像传感器。在上下部分连接处有一圈凹槽,通过3D 打印使项圈卡在凹槽中,保证了偏振相机的稳定性,再通过2根柱子插入内圈上的螺母孔。经过多次测试,不论防水外壳如何摇晃或倾斜,偏振相机都保持竖直向上。
2.2 水下偏振光传感器设计
2.2.1 硬件设备
偏振相机、工控机等硬件设备线缆连接如图5 所示。电源输出端与时控器输入端正负极连接,供电电流从时控器分别输出到PoE 供电器和工控机,工控机与PoE供电器局域网输入端口(LAN IN)连接,偏振相机通过光缆与PoE 供电器局域网输出端口(LAN OUT)连接。

图5 硬件设备连接
通过时控器预先设定开启和关闭的时间,根据时控器设定的时间,电源和PoE 供电器在指定时间给设备提供电力。电源通常为整个系统提供所需电能,而PoE供电器则为偏振相机提供网络电源。一旦供电,工控机就开始工作,控制偏振相机采集视频等数据,采集到的数据通过连接偏振相机和工控机的数据线路进行传输。数据传输到工控机,工控机对接收到的视频数据进行分析、处理和存储。水底偏振相机视频采集装置设计过程中使用的仪器如表1 所示。
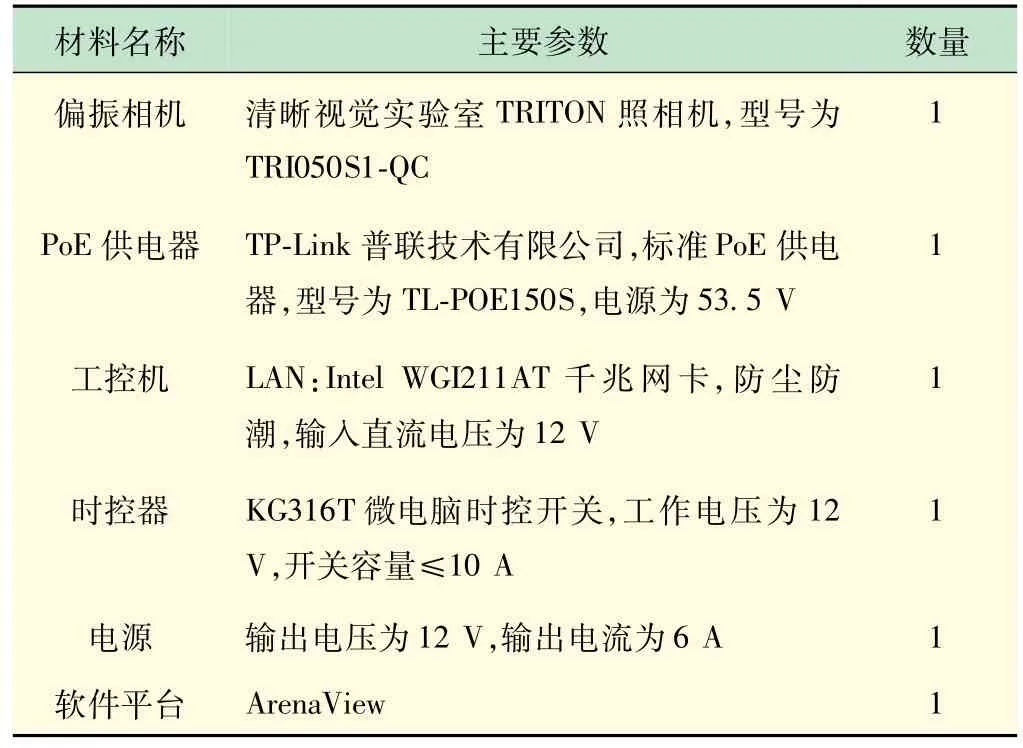
表1 实验仪器
2.2.2 程序设计
偏振相机的运转由工控机编译程序实现。根据工控机的硬件配置和操作系统类型,确保程序与工控机的兼容,使用Python语言编写控制程序。将编写好的程序或相关文件传输到工控机中,为确保程序能够正常运行,需要对运行环境进行配置。
工控机对偏振相机的控制流程如图6 所示。通电后,工控机自行运行代码,启动睡眠,为偏振相机启动提供充足时间;工控机搜索偏振相机,并设置相机录制模式,检测到可用磁盘后启动相机,开始录制,把录制数据保存到目标磁盘;录制时间截止后,相机进入睡眠状态,在此期间停止录制;睡眠时间结束后,再次启动相机,往复循环,直至时控器截断电源供电。
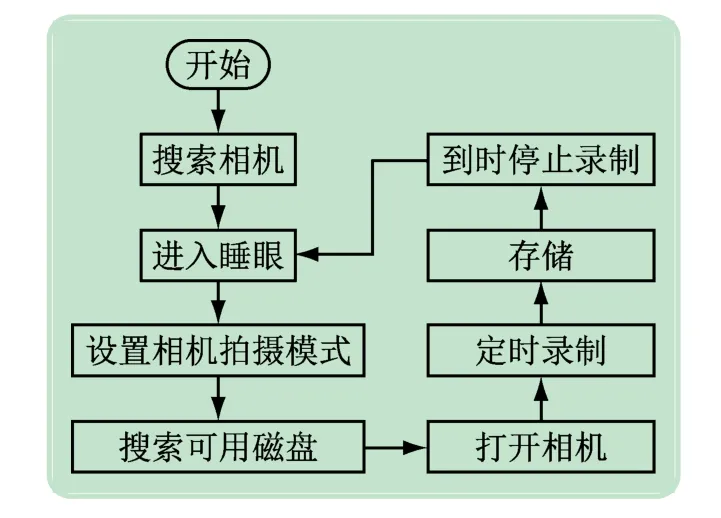
图6 程序执行流程
3 天空偏振分布采集实验方案与结果分析
硬件电路搭建完成后,设置时控器来控制电源供电时段,即采集数据时长与间隔。调试完所有硬件设备后,放入防水外壳中,并保证工控机等硬件设备的稳定性,防止由剧烈晃动造成的硬件设备损坏或者连接断开,再密封装置,完成实验装置的搭建。将实验装置分别在陆地上与水底进行测试,水底测试如图7 所示。

图7 水底测试示意图
乘船到达目标区域,通过绳索将实验装置下潜至不同深度,现场环境如图8 所示。

图8 实际海况
3.1 陆地上捕获大气偏振分布
选取一片空旷的区域,保证偏振相机朝向天空无遮挡。开始测试后,偏振相机在设置的通电时间内自动摄取图像。调整偏振相机模式,分别摄取0°、45°、90°、135°偏振图像和4 个斯托克斯矢量图像。
装置测试期间拍摄大量实验数据,图9 为其中一组偏振图像,拍摄于2023 年7 月5 日上午9 时,地点为山东科技大学国家科技园前广场,北纬36°东经120°07′,拍摄时天气晴朗。不同角度的偏振图像是相机偏振片选择性地阻止或者传递特定方向的偏振光。光经过偏振片后偏振状态为线偏振,因此图像呈现黑色。

图9 陆地上拍摄的偏振图像
结合计算机利用自编偏振图像处理程序对拍摄的数据进行分析,计算α 与D并绘制伪彩色图,蓝色越深数值越小,红色越深数值越大。如表2 所示,偏振度与偏振角分布随太阳位置而变化,图像近似对称,对称轴即太阳子午线。从偏振角分布图来看,在太阳子午线附近发生-90°到90°的跳跃。从偏振度分布图来看,太阳附近偏振度最小,并以环状向外增大。第4 组与另外3 组相比,图像中出现了噪声点,表明恶劣天气对天空偏振分布有着显著的影响。

表2 陆地测试的大气偏振分布
3.2 水下捕获天空偏振分布
水下数据采集地点为胡家山前咀,位于北纬35°06′东经119°52′,此处海水较深且清澈。借助船只,将实验装置放入海底10 m 左右,采集数段视频存储于工控机的硬盘中。水下实验期间录制大量数据,视频大小接近1 T。曝光时间和帧率之间存在一种权衡关系,视频录制时设置自动曝光,每秒能够达到几十帧,既不会因为曝光时间过长或者过短导致图像亮暗,也不会因为帧率过高或者过低导致图像模糊。提取视频并进行分帧处理,得到巨量偏振图像,选取2 组拍摄于不同深度的图像,如图10 所示。水深增加,水中光线被吸收和散射的程度增加,使得图像较为灰暗。

图10 水下不同深度的偏振图像
对拍摄的数据进行分析,计算α与D并绘制伪彩色图,如表3 所示。第1 和第2 组偏振度分布绝大部分为深蓝色,表示偏振度为零,包含的偏振信息极少。实验结果表明,水深及水质状况将影响水下天空偏振探测。

表3 水底测试的天空偏振分布
4 结 语
以实现水下偏振信息采集为目的,设计水下偏正相机天空视频采集装置。该装置分为两部分,一部分是防水外壳,另一部分是偏振光传感器。该实验装置实现了偏振信息的有效检测、实时采集与存储。
实验结果表明,偏振度与偏振角分布关于太阳子午线对称,太阳附近偏振度最小,并以环状向外增大;天气、水深、水质都是影响天空偏振分布的重要因素。这些偏振分布规律与理论结果相似,达到实验装置的预期效果,验证了本装置的可行性。
猜你喜欢
铁道通信信号(2020年12期)2020-03-29
空间电子技术(2020年5期)2020-03-11
微处理机(2019年5期)2019-11-06
制造技术与机床(2018年11期)2018-11-23
现代职业教育·中职中专(2018年11期)2018-06-11
光学精密工程(2016年3期)2016-11-07
中国中医药现代远程教育(2014年14期)2014-03-01
自动化博览(2014年6期)2014-02-28
自动化博览(2014年4期)2014-02-28
大学物理实验(2013年3期)2013-10-25
