永磁同步直线电机(PMSLM)的模糊PID控制技术
2010-05-26 03:24刘向东刘文清
世界制造技术与装备市场 2010年5期
刘向东 刘文清
永磁同步直线电机(PMSLM)的模糊PID控制技术
PID fuzzy control technology for PMSLM
刘向东 刘文清
针对所研究的PMSLM,在原PID控制的基础上设计了一套能够在线修改PID参数的模糊自适应控制系统。为适应实际系统的高速度和高精度要求,专门设计了简化模糊推理机,以提高系统的实时性。文中介绍了模糊自适应PID控制系统的原理与设计方法,并且进行了仿真研究,仿真结果及实验表明该系统跟踪效果好,抗干扰能力强,具有实际应用价值。
模糊PID;PID;直线电机
1 引言
PID控制技术是控制系统中比较成熟的控制技术,PID控制器结构简单、控制参数容易调整,不需要系统的确切数学模型。所以PID控制技术广泛应用于传动控制系统中。但是在要求高速、高精以及扰动比较大的控制系统中,要求系统的调节量大,速度快,固定参数的PID控制已经远远无法满足系统的需要。
在我们所研究的PMSLM的运行过程中,不但要求高速度、高精度和大负载,而且由于直线电机本身所产生的边端效应等,要求我们能够在运行过程中能够及时改变电机的驱动输出状态,以增强运行的平稳性和定位的准确性。所以,我们需要寻求一种新的控制算法,但是算法越复杂,计算量越大,控制系统收敛速度越慢,从而限制了系统的实时性,不利于系统速度的提高。
模糊自适应PID控制技术是模糊控制和PID控制技术相结合的产物。模糊控制器的优点是不要求掌握受控对象的精确数学模型,而是根据平时的经验规则借助推理来决定控制量的大小,所以计算量大大减小,同时具有较宽的调节范围。模糊自适应PID控制器结合了两者的优点,具有模糊控制器调节速度快和PID的稳定输出,同时又可以保证系统的实时反应速度。
2 PMSLM的控制系统简介
PMSLM控制系统的原理图如图1所示,整个控制系统有三个控制环:位置环、速度环、电流环。模糊自适应PID技术主要应用于速度环,以保证系统能够高速度和高精度的要求,同时系统运行比较稳定。

速度环的输出作为电流环的给定,速度环的给定信号则是位置环的输出。电流环是系统的直接输出环节,其控制模型采用在PMSLM系统中广泛应用的矢量控制技术。以转子磁通这一旋转的空间矢量为参考坐标,利用静止坐标系到旋转坐标系之间的变换,实现电流中的励磁电流分量 (Id)和转距电流分量 (Iq)的解耦,然后结合位置值计算出转子位置角γ,就得到一个转子磁通矢量。通过调节这一矢量,就可以实现对电机的控制,矢量控制原理如图2所示。此调节环节采用PID控制得到一个稳定输出。
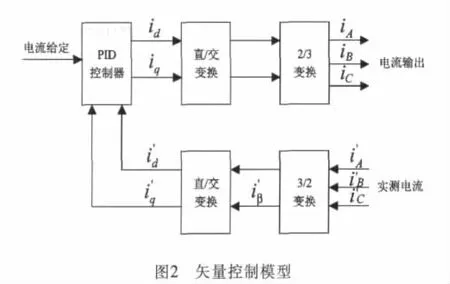
id,iq励磁电流和转矩电流
i′d,i′q,励磁电流和转矩电流的测量值
iα,iβ静止坐标系下的交流电流
i′α,i′β静止坐标系下的交流电流的测量值
iA,iB,iC三项输出电流
i′A,i′B,i′C三项输出的测量值
3 模糊自适应PID控制技术
3.1 模糊自适应PID控制技术的原理
模糊自适应控制技术的原理如图3所示。首先,根据系统输入参数进行常用状态辨识,如果属于常用状态则通过开关执行简化模糊推理机调整PID参数,否则运行模糊推理机;然后把调整的PID参数送入PID控制器;最后,PID控制器把控制量输出给被控对象。
系统中设计两个模糊推理机的原因在于:系统在运行时实时性要求较高,虽然采用模糊自适应PID控制技术程序相对简单,但是查询模糊规则表仍然会占用系统很大的时间。要实验过程中我们发现,系统在实际运行中,有几种的状态的出现频率特别高,所以,我们设计简化模糊规则库,存储系统的常用状态。当系统在稳定运行时,查询简化模糊规则库,可以从很大程度上减少模糊推理所用时间,大大提高系统的实时性。
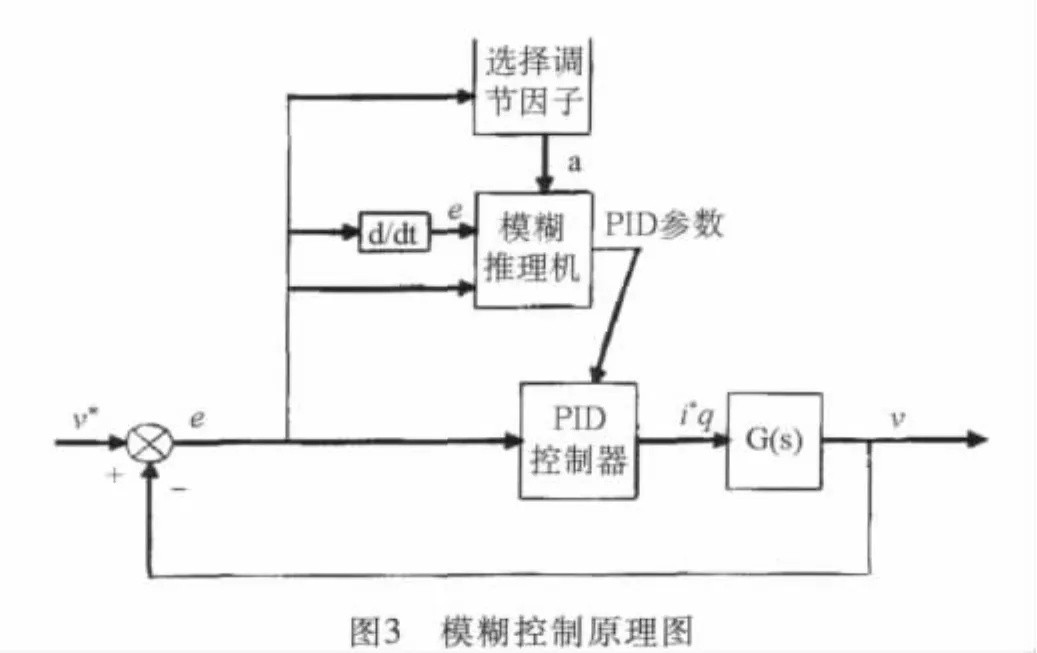
在运行时,我们首先进行简单的辨识,如:IF偏差e非常小 THEN查询简化模糊规则表ELSE查询模糊规则库。这样只要查询到 非常小,而不需要知道变化率的值,就可以说明系统正在稳定运行,我们查询简化模糊规则表进行模糊推理。
3.2 模糊自适应PID控制系统的设计
根据经验,PID控制参数的基本控制规则为:
A.比例系数Kp的作用是减小静差,加快系统的响应速度;但是过大的Kp会导致系统动态性能变差,甚至会使闭环系统不稳定。
B.积分系数Ki的作用是消除静态误差;但是积分控制有滞后特性,过大的Ki会使控制的动态性能变差,严重时会使系统不稳定。
C.微分系数Kd的作用是能根据误差变化趋势作出有效控制,有助于抑制乃至消除调速系统的超调,并能消除系统在负载扰动下的动态速度降落。
根据以上规律,我们设计模糊自适应PID控制系统的模糊推理机。
根据以上分析和输入输出语言变量的设定,可以总结出Kp,Ki,Kd的自适应控制规则,建立模糊控制规则表。模糊控制规则也可以写成条件语句形式,例如:if E=PB and EC=PB then Kd=PM。
参数Kx(x可以表示为P,I,D)的调整值为
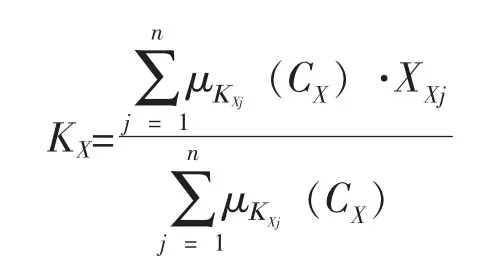
常用状态主要设定为系统启动状态、稳定运行状态和制动状态,所以简化模糊控制规则表中把偏差变化e的语言变量改为:NB(负大),Z(零),PB(正大)。此处各变量的意义与前者完全不同,Z(零)属于前者NZ(负零)和PZ(正零)并集,而NB(负大)和PB(正大)的定义也分别属于前者的NB(负大)和PB(正大)。偏差变化率 和控制器的比例修正系数CP采用前者中的定义方法。
3.3 模糊自适应PID技术的仿真
我们根据实验室现有PMLSM进行仿真,电流环采样周期为100,速度环的采样周期为400,其简化数学模型如下:

其中,τ为极距,M为动子质量,B为粘滞摩擦系数,Fe为电磁推力,F1为负载阻力,Fd为端部效应产生的阻力,v为动子线速度,φf为永磁体有效磁通。
仿真结果如图4。仿真过程中,给定信号是一阶跃信号。图中实线为模糊PID控制系统的跟踪响应曲线,虚线是常规PID控制曲线,两曲线均能够在0.4秒达到稳定,在2.5s加入一最大幅值为200N的随机干扰信号。从仿真结果可以看出,对于阶跃信号,模糊PID控制比纯PID控制具有更好的跟踪性能,且无速度超调;对于干扰信号,模糊PID控制比纯PID控制具有更强的抗干扰能力。所以,模糊PID控制在直线电机控制过程中优于常规PID。
[1] 李永东.交流电机数字控制系统.北京:机械工业出版社,2002
[2] 郭庆鼎等.基于解耦控制的同步传动技术的应用研究.沈阳:控制与决策,2001
[3] 赵金等.交流调速系统模糊PID控制.重庆:兵工自动化,2000
[4] 诸静.模糊控制原理与应用.北京:机械工业出版社,1955
猜你喜欢
高技术通讯(2021年3期)2021-06-09
建材发展导向(2019年13期)2019-08-24
电子制作(2019年7期)2019-04-25
电测与仪表(2017年24期)2017-12-19
北京航空航天大学学报(2017年12期)2017-04-23
西南交通大学学报(2016年3期)2016-06-15
照明工程学报(2016年3期)2016-06-01
电子制作(2016年21期)2016-05-17
通信电源技术(2016年5期)2016-03-22
电源技术(2015年11期)2015-08-22