
基于RBF网络辨识的航空发动机模糊神经网络解耦控制
2010-07-14 01:53翟旭升苗卓广
燃气涡轮试验与研究 2010年2期
吴 勇,王 超,唐 奇,翟旭升,苗卓广
(1.空军工程大学 工程学院,陕西 西安 710038;2.95959部队,北京 100076;3.空军驻京丰地区代表室,北京100074)
1 引言
现代航空推进系统随着性能指标的不断提高,其复杂性也在不断提高,重要标志之一是被控变量不断增加,控制精度愈来愈高。未来的航空推进控制系统将是一个多变量控制系统,因而多回路解耦控制显得尤为重要。尽管目前线性系统的解耦控制已发展了各种成熟的理论和方法,但对于发动机这个非线性系统来说依然显得力不从心。
神经网络以其高精度非线性逼近能力、很强的自适应和自学习能力,在控制系统设计、辨识建模、系统优化和非线性系统解耦方面应用广泛[1]。目前,广泛研究的神经网络解耦控制策略有开环解耦控制、自适应解耦控制、前馈补偿解耦控制、广义预测解耦控制等[2~5],其中大多采用后传播(BP)网络。由于一般的BP神经网络对初始值较敏感,收敛速度较慢,而且极易使学习过程陷入局部极小;而径向基函数(RBF)网络具有运算量小、不依赖初值选取、收敛速度快、收敛具有全局性等特点。因此,本文提出了一种基于RBF网络辨识的航空发动机模糊神经网络解耦控制方法。对于模糊神经网络解耦控制器,由于采用了delta学习规则对控制器参数进行自适应调节,这就必然要求已知被控对象输出对输入的偏导数(Jacobian信息)。因此,本文又采用一个RBF网络用于映射发动机非线性系统的输入输出关系,为模糊神经网络控制器的参数调节提供Jacobian信息。
2 模糊神经网络控制器
基于RBF网络辨识的航空发动机模糊神经网络解耦控制系统的结构如图1所示,系统主要由模糊神经网络控制器、RBF神经网络辨识器及航空发动机构成。其中,RBF神经网络辨识器用于辨识两个输出通道的数学模型,在线完成对各个通道的准确建模,并为模糊神经网络控制器的调整提供所需的Jacobian信息。模糊神经网络控制器,利用RBF神经网络控制器提供的Jacobian信息在线修正控制器参数,同RBF辨识器一起完成对发动机的自适应跟踪控制,实现对航空发动机的多变量解耦控制。
图1中的模糊神经网络控制器由输入层、模糊化层、模糊推理层及输出层构成。网络的输出为kp、ki、kd。模糊神经网络控制器中信号传播和各层的功能表示如下[6],输入层的各个节点直接与输入量各个分量连接,将输入量传到下一层。对该层的每个节点i的输入输出表示为:

模糊化层中,采用高斯型函数作为隶属度函数,μij、σij分别是第i个输入变量、第j个模糊集合的隶属度函数的均值和标准差。则模糊化层的输出f2(i,j)表示为:

式中:i=1,2,…,n;j=1,2,…,n。
模糊推理层通过与模糊化层的连接来完成模糊规则的匹配,各个节点之间实现模糊运算,即通过各个模糊节点的组合得到相应的点火强度。每个节点j的输出f3(j)为该节点所有输入信号的乘积,即:

输出层由三个节点构成,该层的输出为:

式中:wc(i,j)组成输出节点与第三层各节点的连接权矩阵,i=1,2,3。
控制器为:

式中:kp=f4(1),ki=f4(2),kd=f4(3);xc(1)=e(k),xc(2)=e(k)-e(k-1),xc(3)=e(k)-2e(k-1)+e(k-2),其中 e(k)=r(k)-y(k),r(k)、y(k)分别表示网络的理想输出和实际输出。
从上面的推导可以看出,模糊神经网络控制器实际上是利用模糊神经网络整定PID控制器三个参数,其网络输出kp、ki、kd分别为PID控制器比例、积分、微分系数。采用增量式PID控制算法得到的控制器输出为:

采用基于梯度下降的误差修正算法来修正可调参数,定义目标函数为:

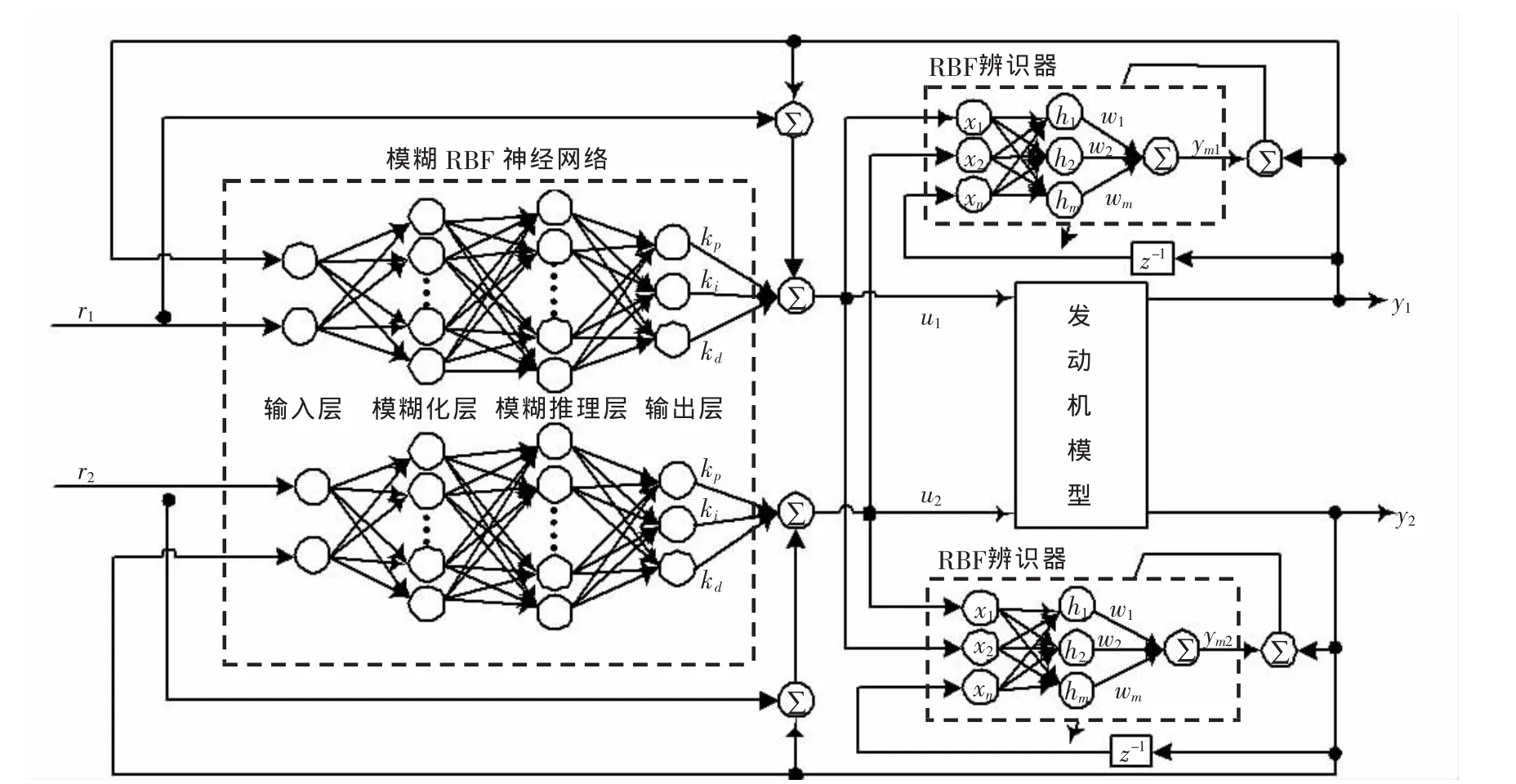
图1 基于RBF网络辨识的航空发动机模糊神经网络解耦控制系统结构图Fig.1 Neural network decoupling system of aero-engine
式中:每一迭代步骤k的控制误差为r(k)-y(k)。网络权值wc的学习算法如下:

式中:ηc为学习速率即为Jacobian信息,可由RBF辨识器辨识得到。
3 RBF网络辨识器
RBF网络是一种具有单隐层的三层前馈网络,是一种局部逼近网络,它能以任意精度逼近任意连续函数[7]。RBF网络由输入到输出的映射是非线性映射,而隐含层空间到输出空间的映射是线性映射,从而大大加快了学习速度并避免了局部极小问题。RBF神经网络结构如图1中所示,由图中可知,RBF网络的输出为:

由(9)式可知,RBF网络中需要学习的参数有三个,即网络隐含层到输出层的权值wi、RBF的中心cij和宽度bi。采用基于梯度下降的误差修正算法训练这三个参数。定义目标函数为:

式中:y为被控对象的实际输出;y*为RBF网络的辨识输出。
根据梯度下降法,wi、cij和 bi的迭代算法如下:
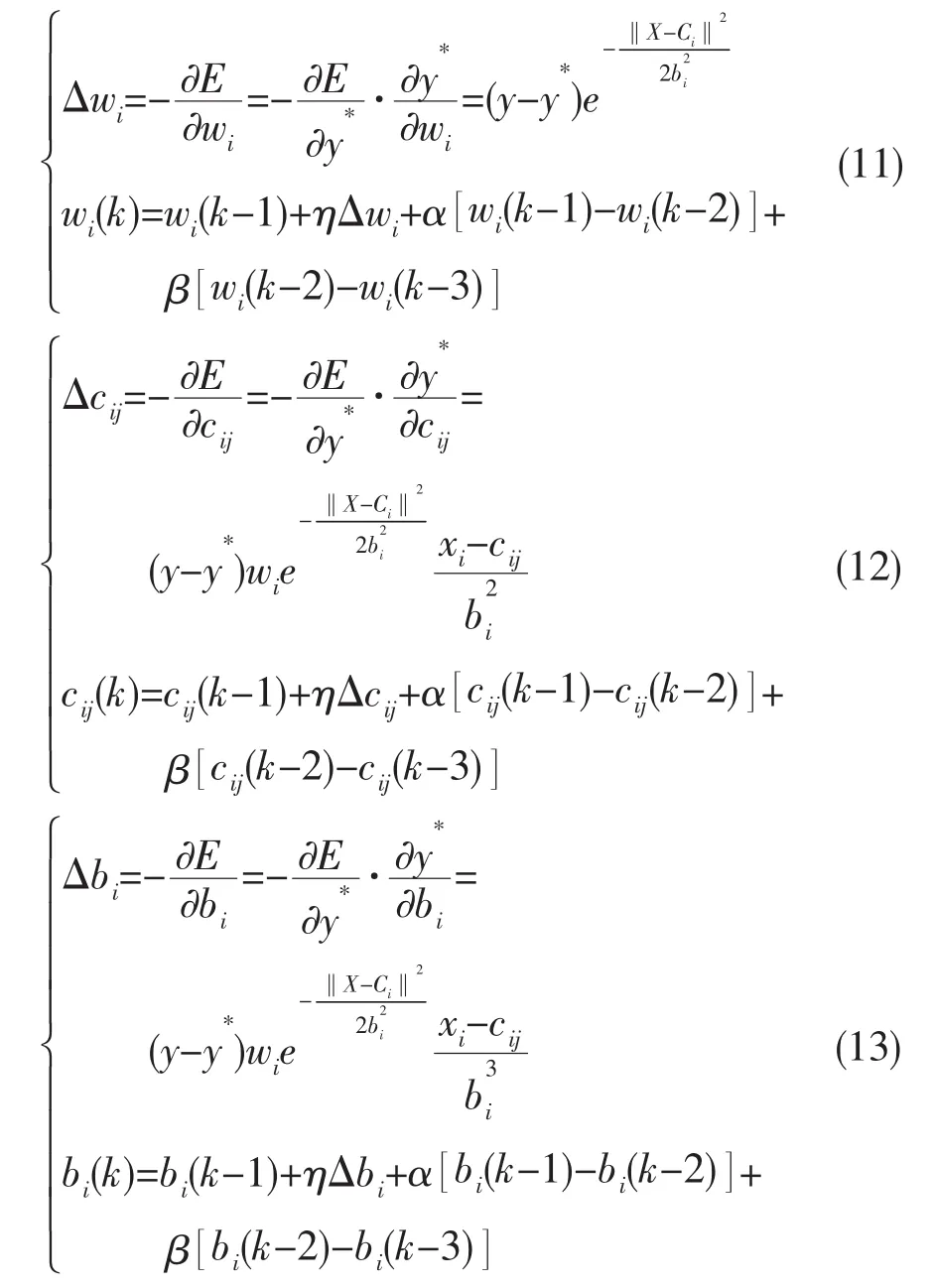
式中:k为迭代次数;学习速率η∈[0,1];动量因子α,β∈[0,1],加入动量因子后,参数修正不但取决于梯度,还取决于上两步参数值的变化,此外,动量因子的加入能使系统跳出局部极小。
因此,Jacobian阵(即对象的输出对控制输入变化的灵敏度信息)算法为:

式中:x1=u。
4 仿真验证
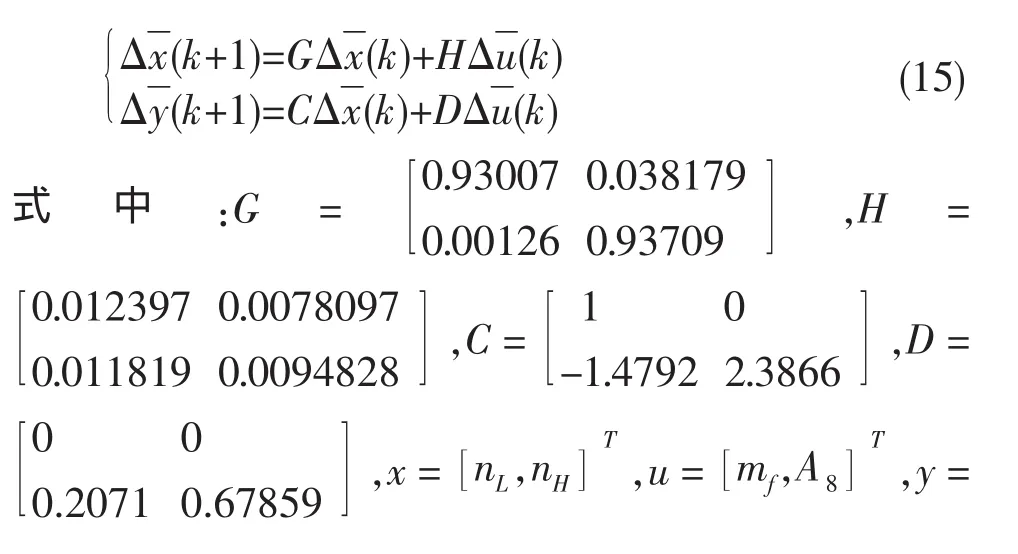
本文研究的对象是某型涡扇发动机,其在高度H=0 km、马赫数Ma=0、处于地面最大状态时的双变量相对化离散状态空间方程可表示为[8]:
给定输入激励为1%阶跃输入,以图1所示系统为例,即:
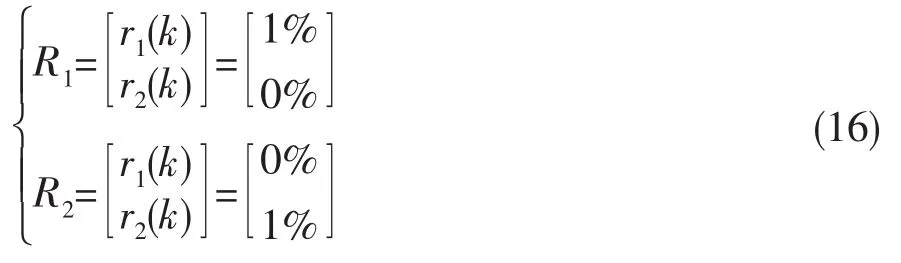
将输入分别送入系统,对网络进行训练。本例中,RBF辨识器的学习速率η取为0.25,动量因子α、β分别取为0.05和0.01;模糊神经网络控制器的学习速率ηc取为0.4。发动机在H=0 km、Ma=0状态下的响应曲线如图2和图3所示。
图2为nL做1%的阶跃、πT保持不变时被控系统的响应曲线,图3为πT做1%的阶跃、nL保持不变时被控系统的响应曲线。从图中可以看出,所设计的控制器具有满意的动态特性和良好的解耦特性。

图2 H=0、Ma=0时nL的阶跃响应Fig.2 Step response of nLat H=0,Ma=0
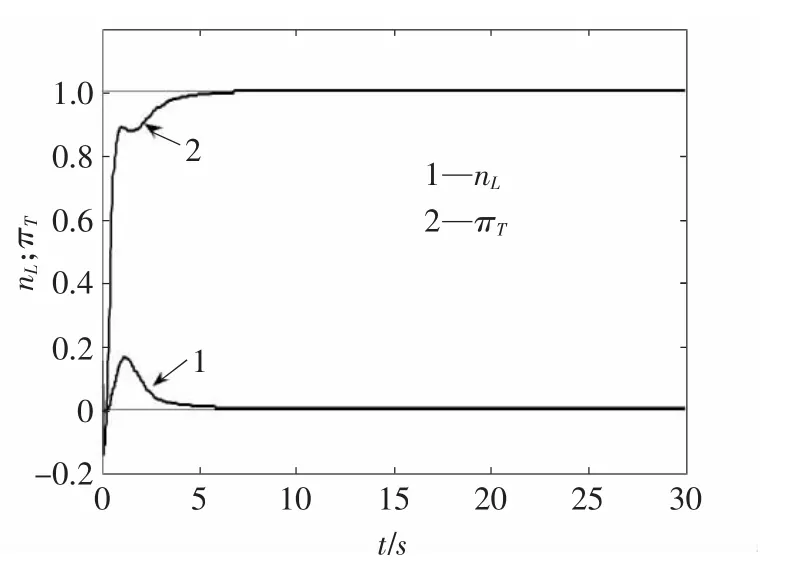
图3 H=0、Ma=0时πT的阶跃响应Fig.3 Step response of πTat H=0,Ma=0
当飞行条件改变后,描述发动机模型的参数也要发生变化。为了考察控制器的自适应能力,本文另选取发动机在H=15km、Ma=1的高空状态作为仿真点,分别对nL和πT施加1%的阶跃输入,系统的输出曲线分别如图4和图5所示,仍然具有较好的解耦特性。
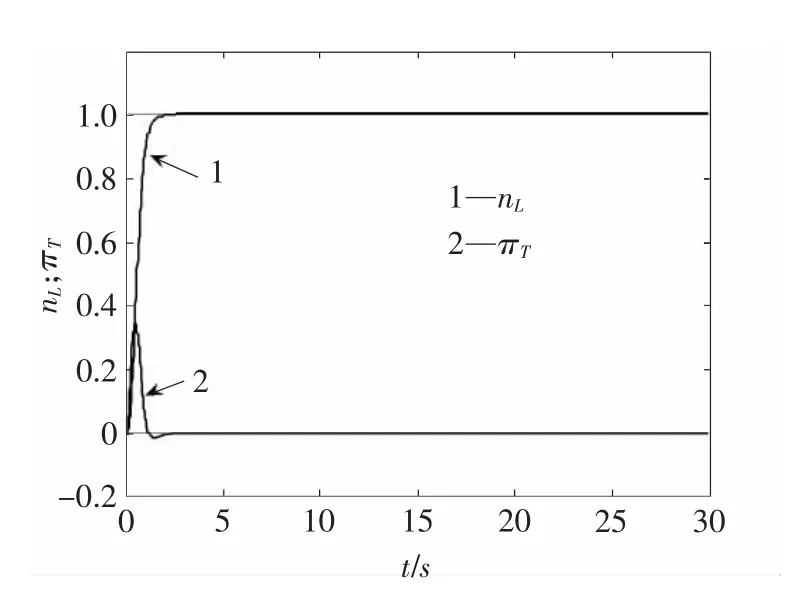
图4 H=15 km、Ma=1时nL的阶跃响应Fig.4 Step response of nLat H=15 km,Ma=1
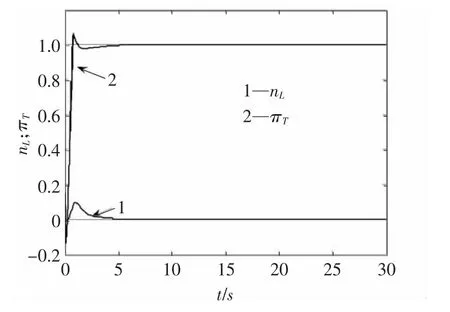
图5 H=15 km、Ma=1时πT的阶跃响应Fig.5 Step response of πTat H=15 km,Ma=1
限于篇幅,文中仅给出了飞行包线内较有代表性点的仿真曲线。仿真结果表明,该方法对发动机的控制有较好的效果,基本消除了变量间的耦合关系,且无稳态误差。
5 结论
本文针对航空发动机各控制变量和回路之间的耦合作用,提出了一种基于RBF网络辨识的航空发动机多变量模糊神经网络解耦控制方法。该方法利用RBF网络能以任意精度逼近任意非线性系统的特性,建立了时变、不确定性对象(航空发动机)的实时模型,为模糊神经网络控制器参数的调整提供了Jacobian信息,解决了模糊神经网络自适应控制器在被控对象不能精确建模情况下应用的问题。大量的仿真结果表明,基于RBF网络辨识的航空发动机多变量模糊神经网络解耦控制器具有良好的动静态特性,消除了变量之间的耦合现象,具有良好的解耦特性。
[1]Wai R J.Hybrid Fuzzy Neural Network Control for Nonlinear Motor-toggle Servomechanism [J].IEEE Transactions on Control Systems Technology,2002,10(4):519—532.
[2]Eun Y,Kim J H,Kim K,et al.Discrete-time Variable Structure Controller with a Decoupled Disturbance Compensator and Its Application to a CNC Servomechanism[J].IEEE Transactions on Control Systems Technology,1999,7(4):414—422.
[3]Bartolini G,Pisano A,Punta E,et al.A survey of Applications of Second-order Sliding Mode Control to Mechanical Systems[J].International Journal of Control,2003,76(9):875—895.
[4]Lin F J,Wai R J.Sliding-mode-controlled Slider-crank Mechanism with Fuzzy Neural Network [J].IEEE Transactions on Industrial Electronics,2001,48(1):60—70.
[5]Huang S J,Huang K S,Chiou K C.Development and Application of a Novel Radial Basis Function Sliding Mode Controller[J].Mechatronics,2003,13(4):313—329.
[6]Lin F J,Wai R J,Lee C C.Fuzzy Neural Network Position Controller for Ultrasonic Motor Drive Using Push-pull DC-DC Converter[J].IEEE Proceedings-Control Theory and Applications,1999,146(1):99—107.
[7]刘金琨.先进PID控制MATLAB仿真[M].北京:电子工业出版社,2004:170—171.
[8]蔡开龙.航空推进系统分布式综合控制与试验[D].西安:空军工程大学,2008.
[9]傅 强,樊 丁.航空发动机PID神经网络解耦控制[J].推进技术,2007,28(2):208—210.
[10]葛宝明,林 飞,李国国.先进控制理论及其应用[M].北京:机械工业出版社,2007.
猜你喜欢
内蒙古电力技术(2022年1期)2022-03-18
煤气与热力(2021年12期)2022-01-19
化工自动化及仪表(2021年6期)2021-11-26
趣味(作文与阅读)(2021年11期)2021-03-09
趣味(语文)(2021年11期)2021-03-09
电子技术与软件工程(2020年17期)2020-02-02
电子制作(2019年13期)2020-01-14
IT时代周刊(2015年7期)2015-11-11
航空世界(2014年6期)2014-04-14
筑路机械与施工机械化(2014年4期)2014-03-01
