
基于滑模变结构控制的永磁无刷直流电机的调速控制
2012-07-02 03:28侯天石
大电机技术 2012年6期
贾 华,侯天石,刘 磊
(1. 内蒙古科技大学信息工程学院,包头 014010;2. 包钢钢联薄板坯连铸连轧厂,包头 014010;)
前言
变结构系统是非线性自适应控制系统中特殊的一种,它与传统的自适应控制系统的最大区别在于其结构可以根据瞬变过程当时的状态偏差及各阶导数值进行系统切换,这种切换是以跃变方式进行的。固定的程序不能决定滑模变结构系统的改变时刻或切换时刻,而这种时刻主要是根据系统的信号偏差及变量的各阶导数按照一定切换函数(某种控制算法)得出的。
1 无刷直流电机数学模型
以三相星型连接无刷直流电机为例,电机的三相电压平衡方程为:
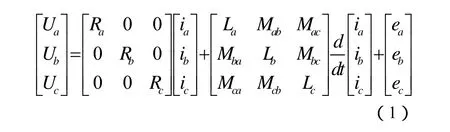
式中Ua、Ub、Uc分别为A、B、C三相相电压;ia、ib、ic分别为电机各相相电流;ea、eb、ec分别为电机各相反电势;Ra、Rb、Rc分别为电机各相绕组的电阻;La、Lb、Lc分别为电机各相绕组的自感;Mab、Mac、Mba、Mbc、Mca、Mcb分别电机两相之间的互感。
由于转子是永磁体,影响可以忽略,所以Ra、Rb、Rc、La、Lb、Lc、Mab、Mac、Mba、Mbc、Mca、Mcb与转子位置无关且为恒值,即Ra= Rb= Rc= R,其中R为相绕组电阻,La= Lb= Lc= L,其中L为相绕组自感,Mab= Mac= Mba= Mbc= Mca= Mcb= M,其中M为两相绕组间互感。
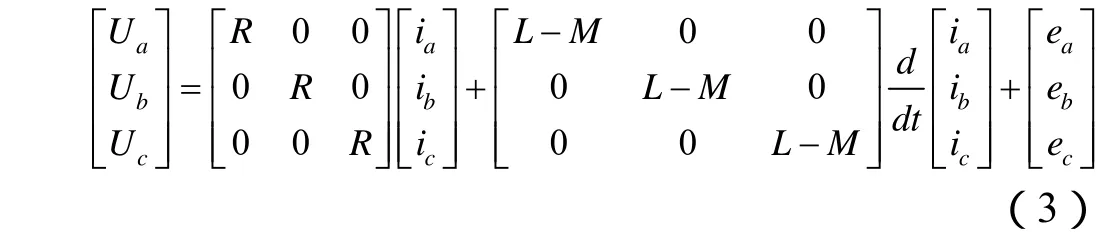
又由于电机绕组采用Y型接线方式,有

由式(1)和式(2)可将电压方程最终化简为
电机的电磁转矩方程为:

式中Te为电机的电磁转矩;为转子机械角速度。
电机的运动方程为:

式中:J为转子及负载的转动惯量;TL为负载转矩;B为电机阻尼系数。
无刷直流电动机的电磁转矩表达式和普通直流电动机相同,其电磁转矩的大小和电流幅值成正比,所以控制逆变器输出方波电流的幅值就可以控制无刷直流电动机的转矩。
对于BLDCM而言,任何时刻只有两相同时导通,忽略绕组因换相引起的电流波动和二极管的压降和续流,把整个电机作一个整体,式(3)可以简化为:

式中:U为电机端电压;i为母线电流;R=2r为等效电阻;L'=2(L-M)为等效电感;Ke为反电势系数;ω为电机角速度,电机的转矩平衡方程为:

式中:Te为电磁转矩;lT为负载转矩;J为转动惯量;为转矩系数;Kb为阻尼系数。
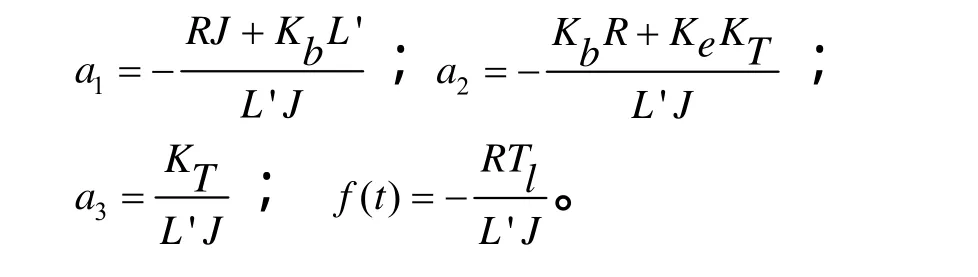
由式(6)~(8)可推导出电机转速与端电压之间的微分方程为:

式中:
2 变结构控制器设计
设rω为给定速度,给定速度和反馈速度的偏差:

则

由式(9)、(10)、(11)可得误差状态方程组:
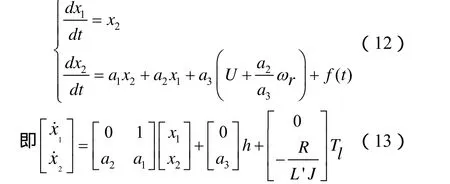
式中:

根据滑模变结构理论,控制逻辑方程为:

控制法则:
(1)当s×x1≥0时,ψ1=α1
当s×x1<0时,ψ1=β1
(2)当 s ×x2≥ 0 时,ψ2=α2
当 s ×x2< 0 时,ψ2=β2
根据滑模变结构理论,在相平面中,运动点遇上滑模线,并逼近原点的充分必要条件是对于所有偏差状态x1、x2存在:

而
要满足(16)式,只要式(17)的各项均小于零,即得:
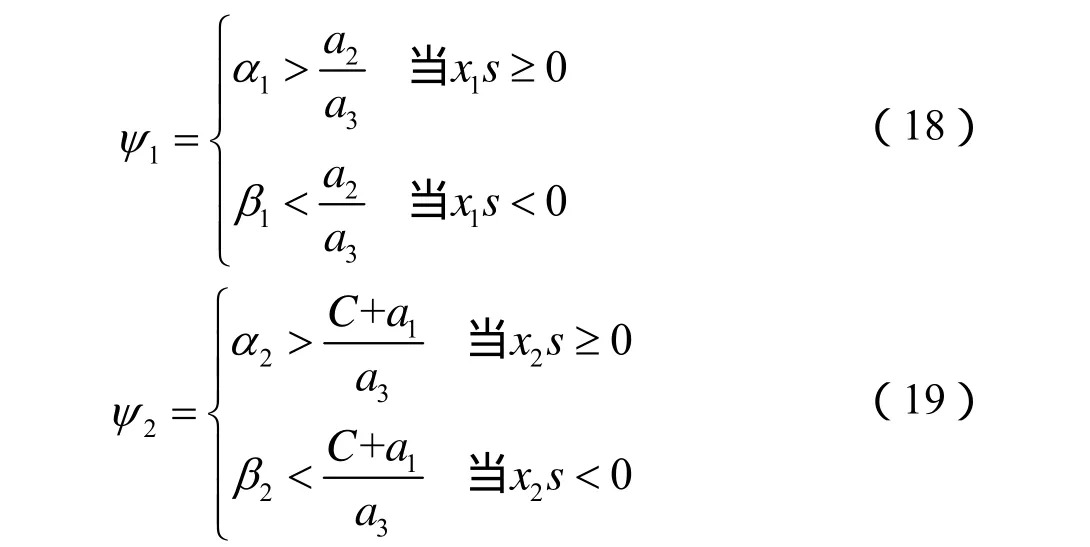

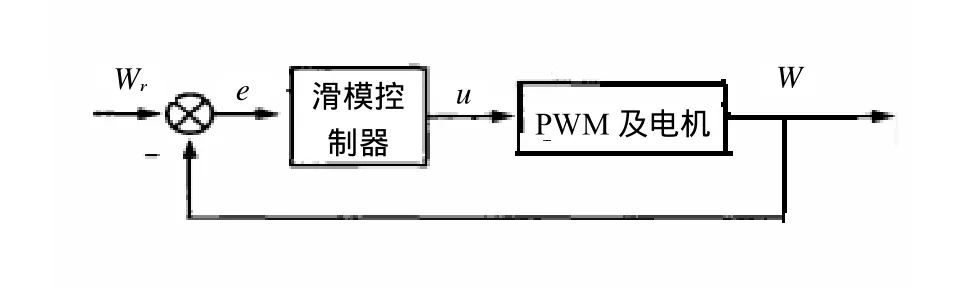
图1 电机速度控制框图
3 仿真实验结果及分析
本文采用 MATLBA/SIMULINK 对滑模变结构控制器进行了仿真,实验样机参数:额定电压为 36V,额定转速为 3600r/min,反电势系数 Ke为 0.067 V/(rad/s),有效相电感 L'为 1.4mH,转矩系数 KT为0.073N·m/A,相电阻 R为 0.66 欧,转动惯量 J为1.57×10-5kg·m2,阻尼系数 Kb为 6.59 ×10-6N·m/(rad/s),仿真时给定的参考转速为1000 r/min,为了验证系统抗干扰能力,在20ms 时,使负载转矩由原来的 0.1N·m2增加至 0.5N·m2,系统分别采用普通 PID 和本文提出的滑模变结构控制策略进行了仿真,图 3所示为滑模变结构控制阶跃响应曲线,图4所示为普通PID控制阶跃响应曲线。
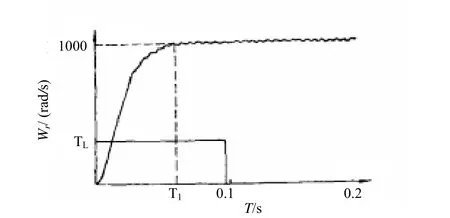
图2 模控制阶跃响应曲线
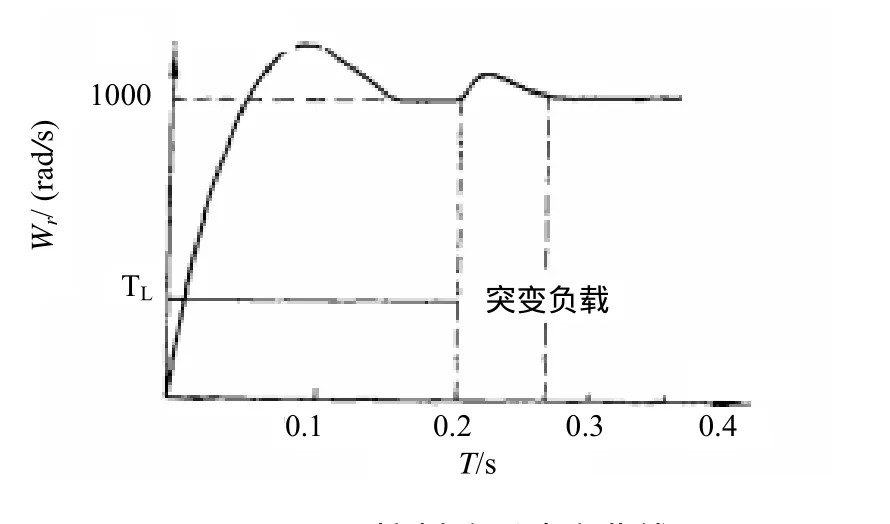
图3 PID控制阶跃响应曲线
根据图3和图4分析,本文提出的滑模变结构控制在抑制超调和加快响应速度等方面取得了相当好的效果,优于普通PID;在负载变化时,滑模变结构控制与普通 PID控制相比,系统速度波动小且恢复时间短,说明本文提出的自适应滑模变结构控制器具有很强的鲁棒性。
[1]EI-Sayed H S, EI-Khouly F M, Khater M, et al.Fuzzy logic based speed control of a permanent magnet brushless DC motor drive[C]. ICEE`07,Lahore, Pakistan, 2007, 4: 1- 3.
[2]王群京, 姜卫东, 赵涛, 等. 基于神经网络的无刷直流电机预测控制的仿真研究[J]. 系统仿真学报,2005, 17 ( 6 ): 1492 -1493.
[3]H siu-Ping Wang, Yen-Tsan Liu. Integrated design of speed-sen-sorless and adaptive speed controller for a brushless DC motor[J]. IEEE Trans. On Power Electronics, 2006, 21 (2): 5182 -5184.
[4]Chun-Liang Lin, Horn-Yong Jan, Niahn-Chung Shieh. GA- based multi objective PID control for a linear brushless DC motor[J].IEEE/ASME Trans on Mechatronics, 2003, 8 (1): 56-58.
[5]贾洪平, 孙丹, 贺益康. 基于滑模变结构的永磁同步电机直接转矩控制[J]. 中国电机工程报,2006, 26 (20): 1342 -1343.
[6]贾洪平, 贺益康. 永磁同步电机滑模变结构直接转矩控制[J]. 电工技术学报, 2006, 21 (1): 12 -13.
猜你喜欢
大电机技术(2022年5期)2022-11-17
中国惯性技术学报(2019年6期)2019-03-04
测控技术(2018年4期)2018-11-25
测控技术(2018年3期)2018-11-25
天津教育·下(2018年9期)2018-07-13
北京航空航天大学学报(2017年4期)2017-11-23
自动化仪表(2017年8期)2017-08-30
电子制作(2017年1期)2017-05-17
淮南师范学院学报(2015年3期)2015-03-22
电机与控制应用(2015年1期)2015-03-01
