基于改进LOG算子的非局域均值图像降噪
2012-11-29 06:02肖华
铜陵学院学报 2012年4期
肖 华
(铜陵学院,安徽 铜陵 244000)
由于图像获取、传输等过程中常常会产生噪声,造成图像质量下降,因此图像去噪作为图像处理的基本技术之一,受到广泛的重视。许多实际噪声可以近似为高斯分布的白噪声,去除图像中叠加的高斯白噪声成为图像去噪研究的一个重要方向。
线性高斯平滑函数[1]在降噪的同时会丢失细节信息,使得图像边缘模糊。为了更好的保护边缘信息,近年来涌现了大量借助非线性滤波器的复杂去噪算法。例如:全变分算法[2]、双边滤波器[3]、小波基技术[4、5]等,这些方法仅利用像素点周围有限邻域内的信息进行降噪,因此可以认为是局域方法。Buades等人[6]提出了NLM(非局域均值)算法,该算法利用图像中大量存在着的相似现象进行滤波,依靠这些相似小窗口的均值,取它们的加权平均值来恢复所取窗口中心点的灰度值。由于该算法充分利用了图像局部结构的相似性,具有很好的去噪效果。但NLM所使用的权值函数是近似高斯函数,使得其降噪效果并不能达到最好。本文基于保护图像边缘的目的,提出采用LOG(高斯-拉普拉斯)算子代替高斯函数来改善去噪效果。
NLM算法的另一个不足之处是计算量较大,原因是在计算某个窗口中心点权值时,须计算其窗口到周围多个窗口的欧氏距离,该计算复杂度正比于窗口内像素的平方。同时当窗口移动时,存在大量两像素点欧氏距离的重复计算。本文在考虑欧氏距离对称性[7,8]的同时,充分考虑重复计算,使得任意两点之间的距离只进行一次计算。
1.非局域均值降噪
非局域均值滤波算法是将当前像素值由图像中所有与它结构相似的像素加权平均得到。对于每个像素的权值,采用以它为中心图像子块与以当前像素为中心子块之间的高斯加权欧氏距离来计算,权值设为此距离的负指数函数值。这样做的好处是在估计当前像素值时,局部结构上与它相似的像素权重较大,而结构相似像素上叠加的噪声是随机的,因而通过加权均值可有效去除噪声。
给定一个离散图像 ν={ν(i),i∈I},其中 I为像素集合。NLM算法的表达式如下:

w(i,j)为依赖于像素 i与像素 j的相似程度(高斯加权欧氏距离)的权值:
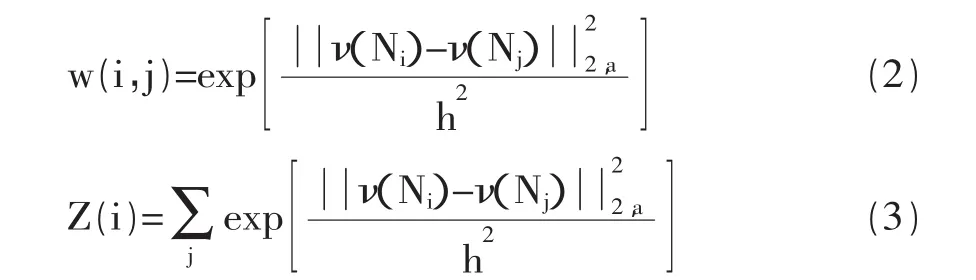
实际计算过程中,为避免计算量太大,参与加权的并非图像中所有像素,而是利用它周围一定大小的区域来计算,例如选取15×15的搜索区域来计算。
Buades[6]通过理论分析和实验结果表明,NLM算法在主客观性能上都优于常见的图像去噪算法,如高斯滤波、各向异性滤波、总误差最小化、邻域滤波等。但该算法采用的是近似高斯权值函数,并不能使降噪效果达到最佳。
2.改进算法
2.1 权值函数的改进
权值函数是影响降噪性能的重要指标,合适的权值函数可以很好的保护图像中的边缘。Buades的权值函数为一指数函数:

权值函数的改进通常是通过比较函数曲线的平滑程度来完成的。文献[8]通过比较几种常用权值函数曲线得出Bisquare权值函数具有更好的去噪性能。Bisquare函数为:

Goossens对其进行了改进:

文献[9]采用了Geman-McClure权值函数。



实验中我们发现当对权值函数进行截断处理后,能明显提高降噪性能。例如对于Buades的指数权值函数函数修改后为:

2.2 加速处理
NLM算法中,复杂度最高的是两像素之间加权高斯距离的计算,因为每个像素都要计算其周围区域内所有像素与它的距离值,并按此距离计算出加权的权值。同时当计算像素点移动时,存在大量两像素点欧氏距离的重复计算。故原NLM算法的计算复杂度为 O(IN2(2K+1)2),其中 N 为搜索窗口的大小,K 为相似块的半宽。
由于欧氏距离具有对称性[7,8],即可以对任意两个像素的距离只计算一次,同时累加到两个像素点各自的累积加权像素值和、及累积权值和之中。设i点为当前像素,j点为计算距离及权值的像素,计算得到的权值为w(t,j),则在i点的累积加权像素值和中加入 w(i,j)v(j),同时在 j点的累积加权像素值和中加入 w(i,j)v(i),并在 i和 j的累加权值和中分别加入w(i,j),这样我们只需要计算j>i的邻域像素的权值。当然,图像边缘像素要做一些特殊处理。这样做的代价是要增加少量的内存占用,分别用于存储加权累积像素值和、累积权值和。
当选取某一搜索窗口进行降噪时,计算的当前像素点须在窗口中移动,这时会存在大量两像素点欧氏距离的重复计算。由于

因此可以用下式计算一维欧氏距离,二维情况可以类推:

式中,j=i+Δi,Δi=0,1,2,…,(N-1)/2(由于对称性,Δi仅取正值)。这样所有两点间的距离只会计算一次,避免了当前像素点移动时重复计算欧氏距离,使得计算复杂度降为 O(I2N2),是原 NLM 算法的 2/(2K+1)2。
3.实验结果与分析
3.1 参数选择
为了验证以上算法改进的效果,选取4幅典型图像 (Lena 256×256,Barara 512 ×512, flinstones 512×512,Saturn 438×328)分别叠加均值为 0、标准差 σ 不同的高斯白噪声。搜索邻域子块为15×15,相似块大小为9×9,参数h取2.1σ。去噪性能评价标准采用峰值信噪比(PSNR),所有的PSNR为5次平均值。
3.2 实验结果与分析
表1给出了σ=25时采用指数权值函数(4)式与截断后(10)式的降噪性能比较。从表1中可以看出对权值函数进行截断,将部分权值修改为0,可以明显提高降噪性能。

表1 指数权值函数截断前后降噪性能比较
表2给出了不同权值函数(截断后)的降噪性能,从表中可以看出,本文提出的权值函数降噪效果要优于Buades的指数权值函数—(4)式截断、Bisquare权值函数—(5)式截断和Geman-McClure权值函数—(7)式截断,在信噪比较低时和Goossens提出的改进的权值函数—(6)式截断差不多,但在信噪比较高时降噪性能要好的多。比较表1和表2可知,在噪声标准偏差σ=25时,采用本文方法对权值修改后Lena图像的PSNR值提高了4.64。
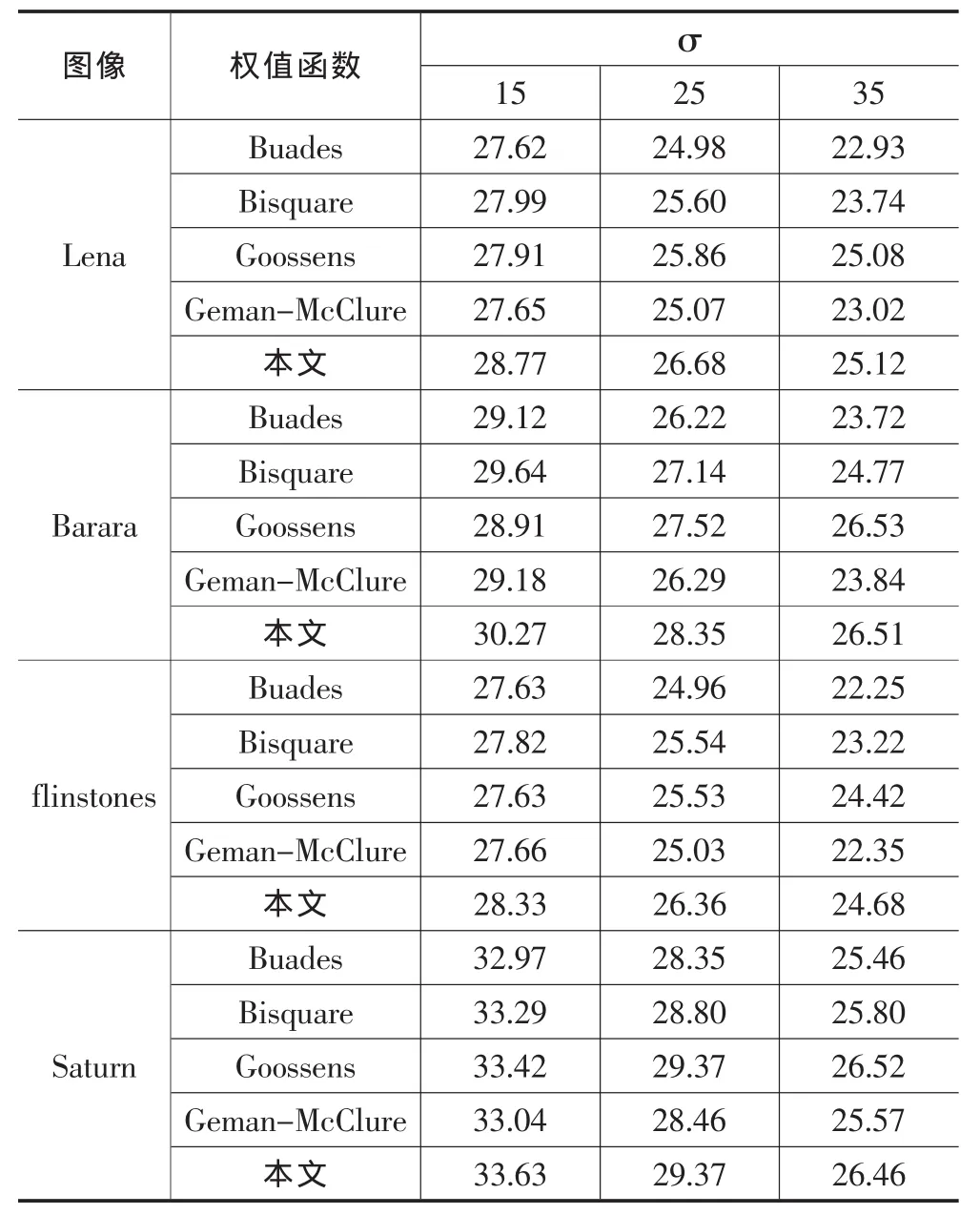
表2 4种权值函数(截断后)的峰值信噪比
图1给出了Barara图像在高斯白噪声标准差σ=25时几种权值函数处理的结果。从图1可以看出,本文权值函数降噪效果要优于Buades权值函数和Bisquare权值权值函数,但比Goossens权值函数在保持图像细节方面稍差,主要是因为本文算法中仍然具有高斯因子,对图像细节具有平滑作用,在PSNR相差不大的情况,对图像的细节保留要稍差一些。
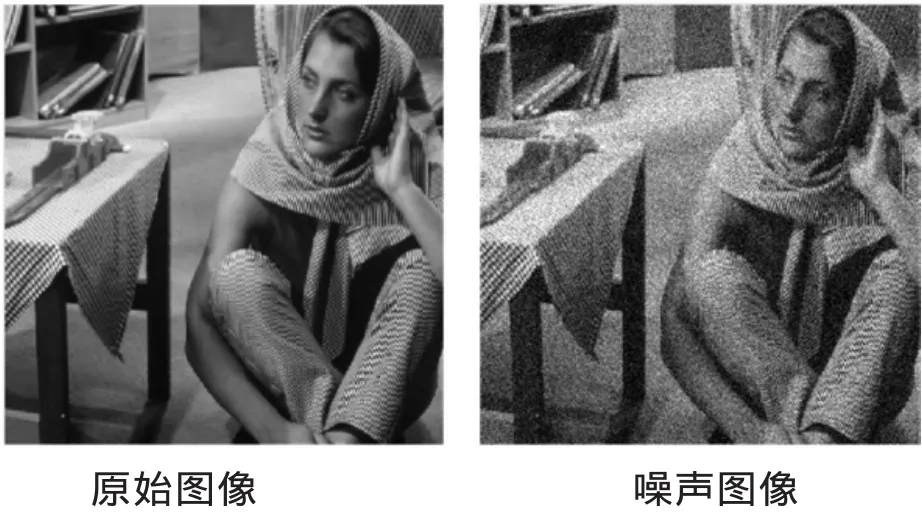
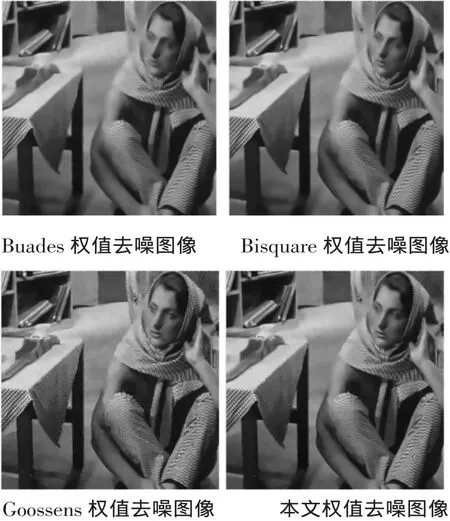
图1 不同权值函数降噪效果
表3是本文算法与标准NLM算法在不同图像(噪声标准差σ=25)上计算复杂度的比较。表中处理时间是matlab 6.5程序在AMD Athlon 5200+双核处理器上通过5次平均得到。从表3中可以看出本文算法的计算时间明显低于标准NLM算法。考虑到其他一些内存读取操作,本文算法的计算时间比标准NLM算法的2/(2k+1)2要略高一些。
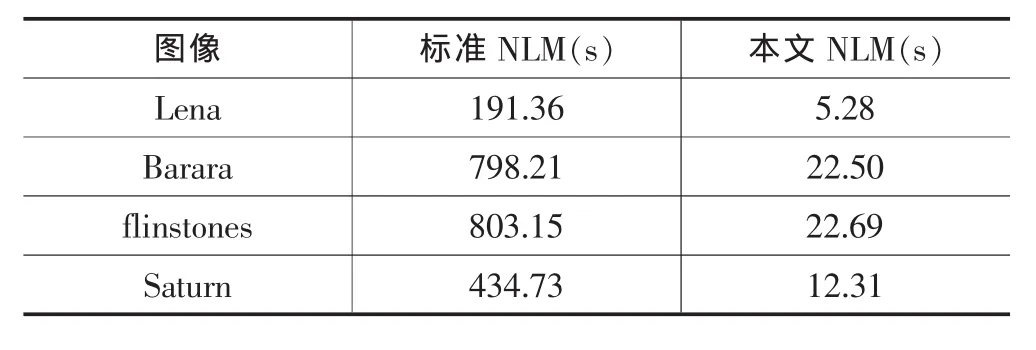
表3 计算时间比较(σ=25)
4.结束语
通过研究非局域均值图像去噪算法中权值函数的作用提出了采用高斯-拉普拉斯算子结构的权值函数。考虑到局域块间的欧氏距离超过滤波参数h时两局域块相似性很差,因此对权值函数进行截断。实验结果表明改进的权值函数具有更好的降噪性能。针对非局域均值降噪算法高的计算复杂性,改变计算方式,避免算法中像素点间距离的重复计算,同时根据局部区域欧氏距离的对称特性,将去噪算法的计算复杂度降低为原来的 2/(2k+1)2左右。
[1]Lindenbaum M,Fischer M,Bruckstein A M.On Gabor's contribution to image enhancement[J].Pattern Recognition,1994,27(1):1-8.
[2]L.Rudin and S.Osher.Total variation based image restoration with free local constraints[C].Proc.of IEEE International Conference on Image Processing(ICIP).Texas:IEEE Image Processing,1994:31–35.
[3]C.Tomasi and R.Manduchi.Bilateral filtering for gray and color images[C].Proceedings International conference on com-puter vision.Washington:IEEE Computer Society,1998:839-846.
[4]J.Portilla,V.Strela,M.Wainwright,and E.Simoncelli.Image denoising using scalemixtures of Gaussians in the wavelet domain[J].IEEE Transactions on image processing,2003,12(11):1338-1351.
[5]A.Pizurica and W.Philips.Estimating the probability of the presence of a signal of interest in multiresolution single-and multiband image denoising[J].IEEE Transactions on image processing,2006,15(3):654–665.
[6]A.Buades,B.Coll.,and J.Morel.A non local algorithm for image denoising.Proc.Int.Conf.Computer Vision and Pattern Recognition (CVPR)[C].Washington:IEEE Computer Society,2005:60–65.
[7]王志明,张丽.自适应的快速非局部图像去噪算法[J].中国图象图形学报,2009,14(4):669-675.
[8]B.Goossens,H.Q.Luong.An improved non-local means algorithm for image denoising.International Workshop on Local and Non-Local Approximation[C].Lausanne:IEEE Image Processing,2008:25-29.
[9]Peter DJ,Govindan VK,Mathew AT et al.Nonlocal-means image denoising technique using robust M-estimator[J].Journal of Computer Science and Technology,2010,25(3):623-631.
猜你喜欢
数学年刊A辑(中文版)(2022年3期)2023-01-05
舰船科学技术(2022年21期)2022-12-12
电讯技术(2022年3期)2022-03-27
山西大学学报(自然科学版)(2021年5期)2021-12-25
现代电子技术(2021年1期)2021-01-17
上海大学学报(自然科学版)(2018年5期)2018-11-02
电脑知识与技术(2018年35期)2018-02-27
自动化学报(2017年11期)2017-04-04
中国医学装备(2015年10期)2015-12-29
太阳能(2015年12期)2015-04-12