
基于C-V 主动轮廓模型的“陡峭”边界的微藻图像分割
2013-02-15 08:01张丽梅张红罗钟铉董云影
大连海洋大学学报 2013年1期
张丽梅,张红,罗钟铉,董云影
(1.大连海洋大学 理学院,辽宁 大连116023;2.辽宁省海洋生物资源恢复与生境修复重点实验室,辽宁 大连116023;3.大连理工大学 软件学院,辽宁 大连116620)
将图像处理技术应用到渔业资源研究中是渔业资源信息处理的重要技术手段之一,如郭常有等[1]、郭显久等[2]分别用图像处理技术进行了扇贝尺寸和海洋微藻计数的研究。海洋中大量繁殖的藻类生物,不仅具有重要的经济价值,也是影响海洋环境的重要因素,由于其种类多、数量大、单体体积小、形状复杂又大量聚集,即使采用现代技术手段也难以辨识。在显微镜下,海洋微藻图像呈现出明暗相间、边界模糊的现象,再加上不可避免的水滴影响,利用通常使用的图像边界获取方法容易导致边界不连贯、纹理过增的现象。而通常的边界获取方法保留了太多图像中个体的独立特征且不封闭,也难以突出重点。为了得到简单而清晰的微藻主要边界轮廓,作者曾尝试使用几何造型中的细分方法获得图像的边界并取得了一定的成效[3-4]。细分方法是运用曲线细分原理,对通过一定规则获得的初始边界点进行有序连接形成初始边界轮廓,将一定的细分规则作用于初始边界轮廓,使产生的新的微藻边界轮廓不断细化,进而得到光滑的主要图像边界。用这种方法可以只获取需要的那部分图像的封闭边界轮廓,忽略不必要的细节信息,但由于细分方法自身的局限性,所获得的边界虽简洁但精准度有欠缺,仅适用于粗线条的图像分割。
近年来,基于偏微分方程的主动轮廓模型在图像处理中得到了广泛的应用[5-10],主动轮廓模型的基本思路是把演化曲线(主动轮廓)隐含地表示为一个更高一维的函数(水平集函数)的零水平集,根据分割要求建立合适的偏微分方程,水平集在该偏微分方程(演化方程)的控制下进行演化,直到零水平集演化到图像的目标边界为止[10]。Chan等[11]提出一种简化的基于Mumford -Shah 模型的区域最优化主动轮廓模型(C -V 主动轮廓模型),因其能较好地处理模糊边界、目标离散、纹理较多的图像边界而被广泛应用。本研究中,作者利用这种方法对微藻图像进行分割,并针对具有“陡峭”边界的微藻图像分割过程中所遇到的边界难以获取的问题,对C- V 主动轮廓模型进行了改进,即以边界曲线的变化趋势为基准构造初始水平集,并通过符号函数区分初始的内部、外部以及边界,再按照原C -V 主动轮廓模型的思路与方法进行边界搜索,快速、准确地获取图像的“陡峭”边界。将用两种方法获取典型的海洋微藻图像边界的过程进行对比可知,改进的C -V 主动轮廓模型方法不仅提高了边界获取的效率,而且在初始边界设定时,使得操作员的主动参与程度大大增强,这为C-V 主动轮廓模型的实际应用提供了技术支撑。
1 C-V 主动轮廓模型[6]
设定义域Ω 上的图像u0(x,y)被闭合轮廓C 划分为内部和外部两个同质区域,各区域的平均灰度分别为c1和c2。假定L(C)为轮廓C 的长度,S(C)为C 所包围区域的面积,各能量项的权重系数μ、ν、λ1、λ2满足条件μ ≥0,ν ≥0,λ1、λ2>0。构造如下能量函数:该能量函数只有当闭合曲线C 位于两同质区域的边界时取得极小值。这种图像边界获取方法利用了图像的全局信息,故可以得到全局最优分割。
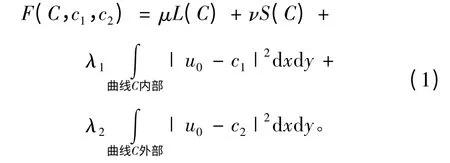
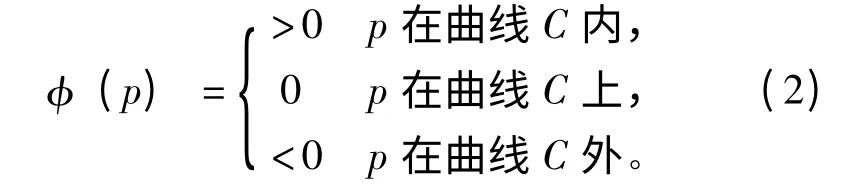
假定φ是根据闭合曲线C 构造的水平集函数,即满足下式的函数:
Chan等[11]根据欧拉-拉格朗日方法推导出使式(1)极小化的水平集函数φ 应满足如下微分方程:
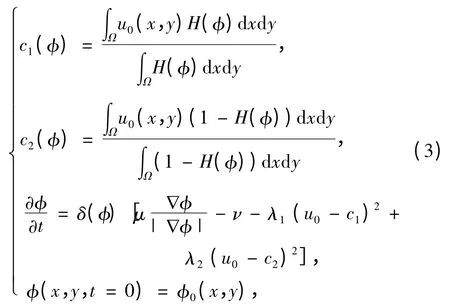
在实际计算时,Heaciside 函数和Dirac 函数分别取为
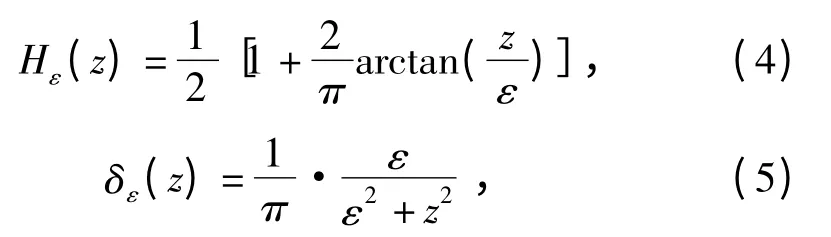
其中,ε 为常数。
在实际运算时,φ 需初始化为符号距离函数,为了保持数值的稳定,每次更新后都要重新初始化,为此采用如下迭代方程:
重新初始化可能导致零水平集位置发生偏转,因此,需保证对图像区域内的每一点用式(6)进行的迭代结果都收敛。
2 微藻图像分割
图1 为实验室获得的带有杂质的甲藻、夜光藻、底顶角藻、伏恩海毛藻、针形曲舟藻、舟形藻6种微藻显微图像。在使用C-V 主动轮廓模型时,将初始零水平集均设为靠近图像中央部分的圆周,按照上节提出的方案进行边界收索,主要参数设置:δ=0.1,ε=2。执行效果如下:图1(a)、(b)在采用C-V 主动轮廓模型收索边界时速度较快,效果较好,结果见图2。图2(a)、(c)分别为甲藻和夜光藻图像及其初始零水平集,图2(b)、(d)分别为甲藻和夜光藻图像及其按C -V主动轮廓模型收索到的边界。因为图像主要边界呈圆形,曲率稳定,所以获得边界的效果均较好。
将上述方法用于图像边界曲率变化较大的微藻图像时,获得边界的时间骤增。图3 为按照C -V主动轮廓模型收索图1(c)底顶角藻边界的过程,每循环50次取一次图像,每次循环的时间按递进增长,循环次数越多,反应越慢,总耗时约1 min(在联想PC 机上运行)。图4 为按C -V 主动轮廓模型收索图1(d)伏恩海毛藻边界的过程,经过近5 000次循环收索,几乎无法获得边界。分析上述问题得出如下规律:当微藻图像的主要边界接近圆形时,即边界曲率接近常数时,采用通常使用的C-V 主动轮廓模型比较容易获得边界;反之,当微藻图像边界曲率变化较大,属于“陡峭”边界时,初始水平集设定为圆周的C -V 主动轮廓模型方法难以获得边界(图4),即使可获得边界,也需要较长的时间(图3)。
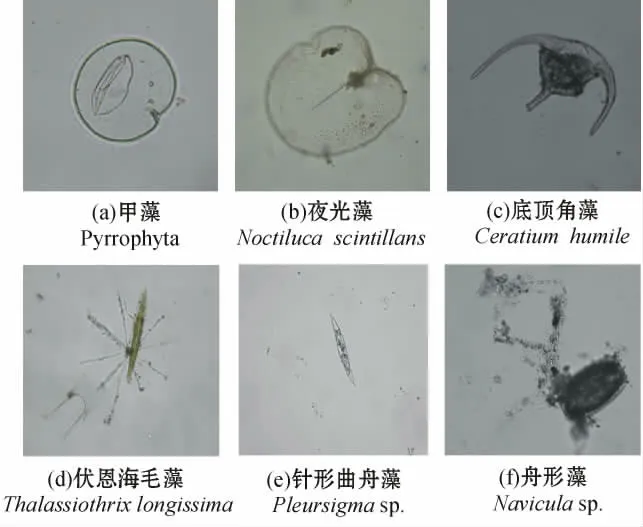
图1 带有杂质的微藻显微图像Fig.1 Microscopic images of micro algae with some impurities
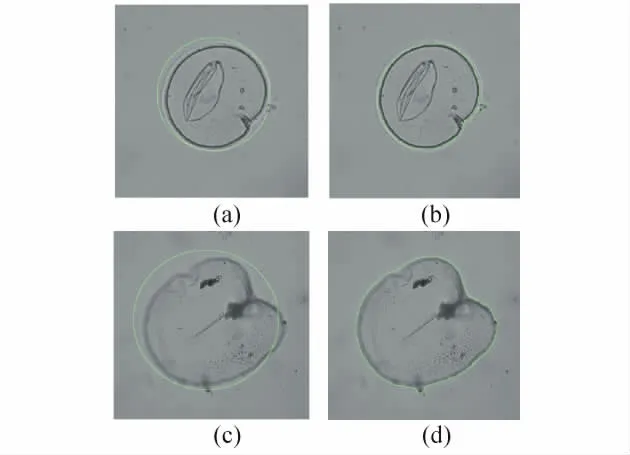
图2 用C-V 主动轮廓模型获取甲藻(a)和夜光藻(c)的边界Fig.2 The boundaries of the microalgae Pyrrophyta(a)and Noctiluca scintillans(c)acted by CV active contour model
从图2 ~图4 的边界获取过程图不难看出,当采用C-V 主动轮廓模型获取边界曲率稳定的图像边界时,将初始水平集设定为贴近边界的圆周,获取的图像边界连接性、简洁性均好(图2);当采用C-V 主动轮廓模型对带有“陡峭”边界的微藻图像进行分割时,边界获取速度慢(图3),甚至难以获得边界(图4)。分析原因,主要是初始水平集设定为圆周(或其他图形)时未考虑到微藻图像个体的边界特点,不能照顾到图像边界的个体差异性。为了克服C-V 主动轮廓模型在遇到复杂微藻图像时边界获取时间过长甚至难以获取到复杂边界的问题,本研究中提出了改进的C -V 主动轮廓模型。
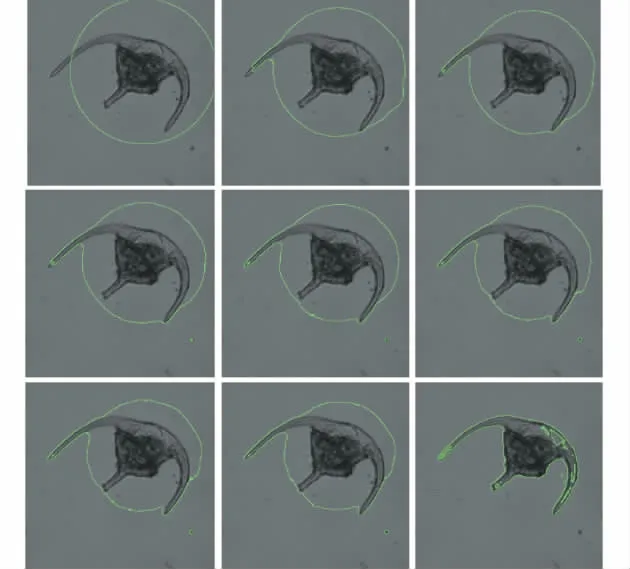
图3 用C-V 主动轮廓模型获取底顶角藻边界的过程图(从左向右)Fig.3 The processing images after Ceratium humile acted by C-V active contour model(from the left to the right)
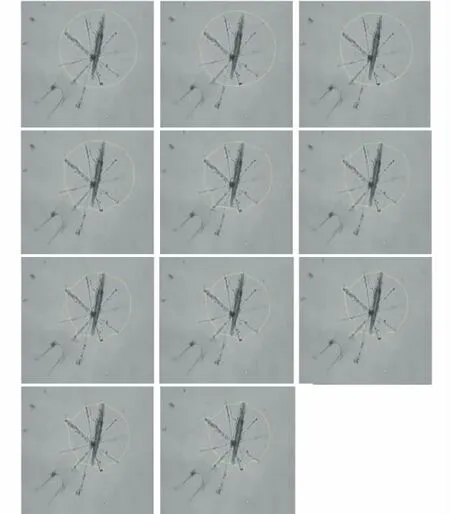
图4 用C-V 主动轮廓模型获取伏恩海毛藻边界的过程图(从左向右)Fig.4 The processing images after Thalassiothrix longissima acted by C-V active contour model(from the left to the right)
3 改进的C-V 主动轮廓模型
C-V 主动轮廓模型属于全局最优算法,在设定初始闭合曲线时通常采用图像区域内的圆周,这样会带来一些问题:1)当初始闭合曲线设定为靠近边界的圆周时,对于边界接近圆周的图像能够较快获得边界,但对边界复杂如有较大“凹坑”或边界曲率变化较大时,获取最终边界的时间较长,原因主要是在遇到曲率变化较大的边界时收缩到边界的速度较为缓慢;2)Dirac 函数δε(z)狭窄的定义范围,限制了该算法检测图像边缘的全局性,对远离闭合曲线的“厚”目标边缘不能稳定检测[5];3)对于实际图像边缘检测,由于所监测的图像千差万别,简单设定初始闭合曲线为某圆周或其他图形显然是不合理的。如果能够针对每一幅图像的特点加入操作员自身的判断,将更有利于对各种图像进行精确判断,为此本研究中提出一种“所见即所得”的初始闭合曲线获取方法。
该方法的思路是,操作员用画笔粗略描绘出所需精确给出的图像边缘轮廓,该边缘轮廓信息被程序读取后形成封闭曲线并视其为初始闭合曲线C。
在这样给定的初始闭合曲线C 上构造满足式(2)的水平集函数φ是比较困难的事情,在实际操作中可以将初始闭合曲线C 的内外能量参数定义为符号函数,即
其中:p是图像上的点。这样定义的初始水平集函数在使用式(6)进行迭代时加快了迭代的速度。
算法的具体实现过程如下:
1)读入图像,手动取得确定的初始图像边界轮廓点,程序顺序连接这些图像边界轮廓点形成初始闭合曲线C;
2)构造水平集函数φ,使之满足式(7);
3)主要参数与改进前相同,即在δ=0.1,ε=2 的条件下运行改进的C-V 主动轮廓模型。
4 改进模型的实验结果
采用改进的C-V 主动轮廓模型获取微藻图像边界的实验过程如图5 ~图7。图5(a)为手工按序点击的底顶角藻边界点连接成的初始边界(初始零水平集),图5(b)为图5(a)经过式(7)作用后的效果图,图5(c)为演化后得到的边界曲线,显示速度快于图3 中使用的方法,而且获得的信息量大。
伏恩海毛藻图像边界模糊,手工获得边界粗略图也十分困难,为此扩大了图像边界的初始设定区域。图6(a)为手工按序点击的边界点连接成的初始边界(初始零水平集),图6(b)为图6(a)经过式(7)作用后的效果图,图6(c)~(f)为演化后得到的边界过程图,这个操作过程比图5 获取边界的速度略慢,但得到的边界效果很好。
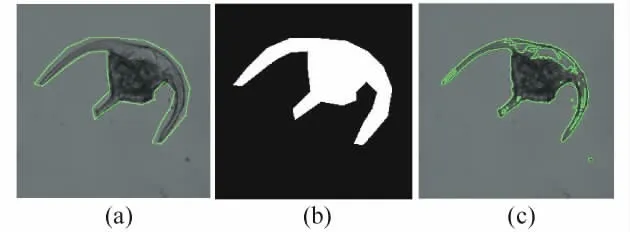
图5 用改进的C-V 主动轮廓模型获取底顶角藻边界的过程图Fig.5 The processing images after Ceratium humile acted by modified C-V active contour model
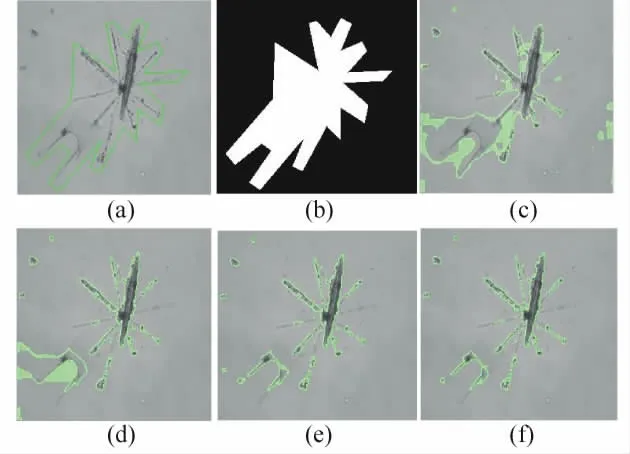
图6 用改进的C-V 主动轮廓模型获取伏恩海毛藻边界的过程图Fig.6 The processing images after Thalassiothrix longissima acted by modified C-V active contour model
为验证改进的C -V 主动轮廓模型的适用性,对针形曲舟藻和边界杂乱的舟形藻分别进行了边界收索,同样获得较好的效果,结果见图7。
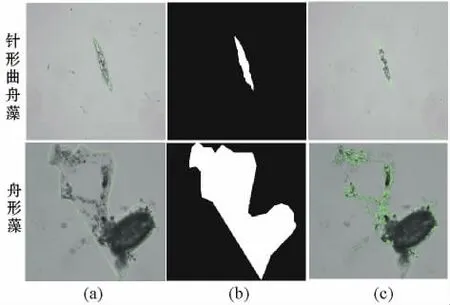
图7 用改进的C-V 主动轮廓模型获取针形曲舟藻和舟形藻边界的过程图Fig.7 The processing images after Pleursigma sp.acted and Navicula sp.by modified C-V active contour model
采用改进的C -V 主动轮廓模型获取边界时,只需先通过手动获得粗略边界,粗略边界尽量包含且贴近所关注区域的主轮廓,如图5(a)、图6(a)、图7(a)。这样做将使得最终边界的获得速度更快,效果更好,如图5(c)、图6(f)和图7(c)所示。本实验结果表明,改进的C-V 主动轮廓模型算法增强了主动获取图像边界的能力,速度快,适用性强。
致谢:本研究中使用的微藻图像均由大连海洋大学刘海映教授的研究团队提供,在此表示感谢!
[1]郭常有,曹广斌,韩世成,等.基于图像处理技术的扇贝尺寸及位置自动识别[J].大连海洋大学学报,2012,27(6):578 -582.
[2]郭显久,张国胜,耿春云.基于图像处理技术的海洋微藻数量统计方法[J].大连海洋大学学报,2012,27(4):368 -372.
[3]Zhang Limei,Luo Zhongxuan.A new subdivision wavelet for image processing[C].The Conference of World Congress on Intelligent Control and Automation,2006:10285 -10288.
[4]Zhang Limei,Wang Bo,Luo Zhongxuan,et al.Comparative study of C-V active contour model and subdivision for microalgae image segmentation[C].The International Conference on Electric Information and Control Engineering,2011:1241 -1244.
[5]张明杰,李翠华,刘明业.基于主动轮廓线模型的海面运动目标跟踪[J].计算机工程,2006,32(6):34 -36.
[6]张开华,周文罡,张振,等.一种改进的C - V 主动轮廓模型[J].光电工程,2008,35(12):112 -116.
[7]杨勇,潘伟民,徐春.水平集函数规则化的C-V 主动轮廓模型[J].计算机工程与应用,2008,44(34):166 -168.
[8]罗红根,朱利民,丁汉.基于主动轮廓模型和水平集方法的图像分割技术[J].中国图象图形学报,2006,11(3):301 -309.
[9]张景辉,李波,党长青.结合梯度信息的主动轮廓模型图像分割算法[J].制造业制动化,2011,33(3):83 -86.
[10]蒋建国,任靖,郝世杰,等.自适应主动轮廓模型下的骨关节MRI 快速分割[J].中国图象图形学报,2011,16(7):1199 -1205.
[11]Chan T,Vese L.Active contours without edges[J].IEEE Transaction on Image Processing,2001,10(2):266 -277.
猜你喜欢
古今农业(2022年1期)2022-05-05
儿童时代·幸福宝宝(2021年11期)2021-12-21
装备制造技术(2020年1期)2020-12-25
现代装饰(2020年4期)2020-05-20
制造技术与机床(2019年11期)2019-12-04
证券法律评论(2018年0期)2018-08-31
环境保护与循环经济(2017年3期)2017-09-26
中国交通信息化(2017年4期)2017-06-06
外语学刊(2014年6期)2014-04-18
食品工业科技(2014年23期)2014-03-11
