
基于线阵CCD高速目标信号提取
2013-03-30 06:09何丹,雷鸣
机械与电子 2013年2期
何 丹,雷 鸣
(西安工业大学电子信息工程学院,陕西 西安 710032)
0 引言
近年来,人们对光背景下的基于线阵CCD的高速目标信号的提取问题越来越感兴趣,在许多领域中都要求检测和提取目标信号。目标信号的提取不仅与光强是否稳定、亮度是否均匀和自然环境中的假目标等外界因素有关,而且最主要的是对弹丸信号的特征无法准确获知。因此,除减少外界干扰外,如何从CCD输出信号中提取出真正代表目标边缘的特征信息,是信号提取的难点。
1 CCD测量系统的分析
由于CCD技术的迅猛发展,CCD在测量中的应用越来越受欢迎。CCD有面阵型和线阵型。面阵CCD能够获取二维图像信息,测量图像直观,像元总数多,而每行的像元数较线阵的少,帧幅率的限制性比较大;线阵CCD可以得到很多的一维像元数,总像元数较面阵CCD的少,但每次记录一行数据,帧幅率比较高,对一维动态目标的提取特别适用[1-2]。所谓信号的提取就是对获取的图像信息进行分析,从而排除噪声的干扰,正确判断出目标信号的存在并获取目标信号的有关位置信息。课题所要提取的高速目标的边缘在图像上是一个模糊的概念,即变化剧烈的部分,所以准确地提取出目标的边缘信息直接关系到目标的识别。
测试系统的基本结构如图1所示。高速飞行的动态目标或其他静态目标,通过光学成像系统反映到线阵CCD相机上,由触发控制系统采集动态目标的瞬间图像信息并保存数据,然后进行目标位置信息的提取。

图1 基于CCD的测量系统
用CCD接收的弹丸目标信号通常是钟形脉冲信号,由于弹丸是横向穿过线阵CCD,所以只能在某几个像元上“经过”。为可靠捕获目标图像,必须选用高速CCD芯片[3]。由于弹丸飞行速度极快,多数情况下摄像机只能拍到1~2场的图像信号,为信号后续处理带来困难。另外,目标信号的特征又无据可查,光背景的稳定度、均匀度及自然环境的假目标对其也有影响[4],在这种情况下,用传统的信号处理方法完成信号提取有一定困难。因此,寻找一种有效的信号提取方法是该项目的重点和难点。
2 高速目标信号的提取
目前国内关于高速目标提取的文献很少,常规的方法耗时长,平滑效果不明显,针对此不足,利用信号及干扰的相关性,经过一系列的处理获得有用的目标信息。
2.1 常规的信号提取算法
由于弹丸是横向穿过线阵CCD,因此获取的图像目标只有某几个像元“经过”。为了得到更多的目标信号,通常要绘制各列的像元图,初步分析弹丸目标的位置;为了提高精度,绘制像元各列取方差后的效果图,最终获取弹丸目标的位置信息[5]。
图2和图3是以线阵CCD所得数据的第30列和第60列为处理对象,以行向量、像元数为横、纵坐标。由图2可知,物体第30列像元数相差不大,即像元变化小,容易确定像元数,噪声比较均匀,不能很明显的区分出背景和目标。弹丸由于高速飞行和形状的不规则,像元值变化大,反映在图3上就是在20行到30行之间有一个大的幅度波动,由此判断弹丸目标位置在此。
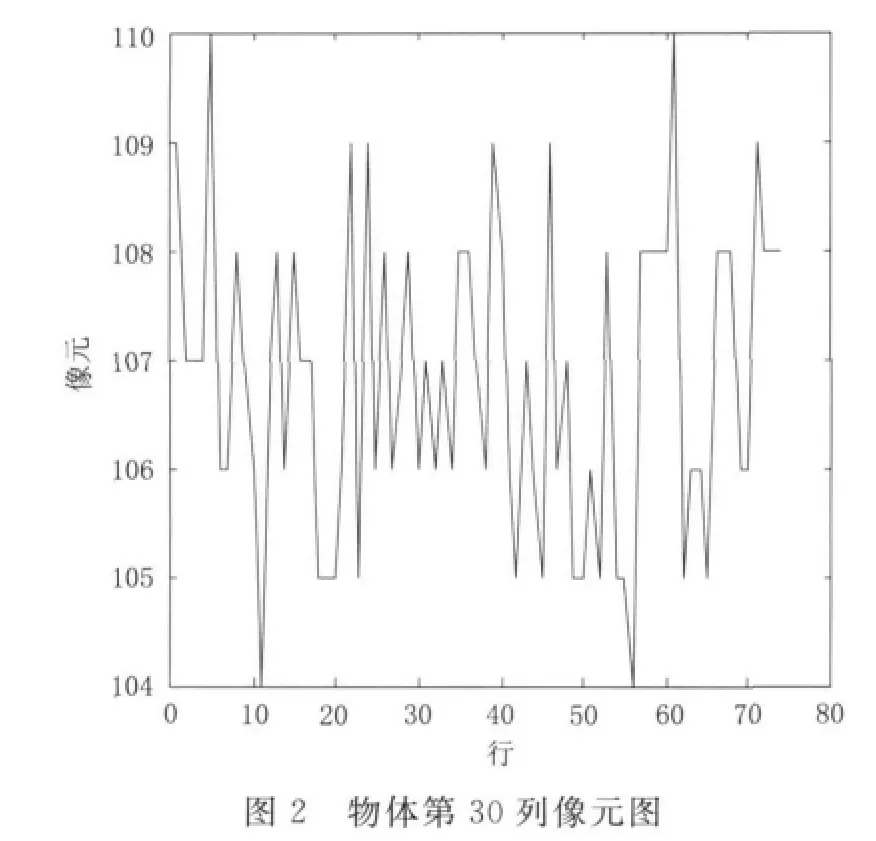
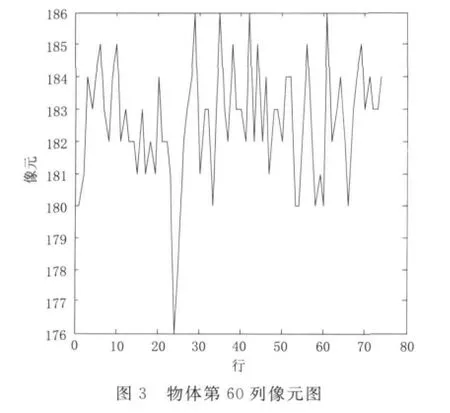
图4和图5是以线阵CCD所得数据的第30列和第60列为处理对象,以行向量、像元数取方差为横、纵坐标。由于弹丸目标与背景像素相差不大,只绘制每列的像元变化,无法获取高速目标信号的位置信息。方差运算可以提高精度。通过图4和图5可知,第30列的方差值变化幅度比较小,而第60列具有在24行左右有一个明显的幅度波动,由此可获取弹丸的位置信息。


虽然此方法可得到目标的位置信息,但是缺少一个判断准则,即相差多少像元时可判定为目标。由于目标本身占有的像元比较少,如对2048像元的线阵CCD,当最小目标的直径25mm弹丸时,在像面上最少占有2到3个像元,再加上目标信号与背景的对比度小,光学系统对信号又有一定的衰减,所以最终由CCD摄像机输出的目标信号比较小,信噪比比较低[6]。因此,必须寻找一种比较有效的高速信号提取算法。
2.2 互相关法提取高速目标信号算法
2.2.1 基本原理
在信号分析中,互相关和自相关分别表示的是2个时间序列之间和同一个时间序列,在任意2个不同时刻的取值之间的相关程度。即互相关函数是描述随机信号X(t),Y(t)在任意2个不同时刻t1,t2取值之间的相关程度;自相关函数是描述随机信号X(t)在任意2个不同时刻t1,t2取值之间的相关程度。互相关函数给出了在频域内2个信号是否相关的一个判断指标,把两测点之间信号的互谱与各自的自谱联系起来[7-8]。在图像处理中,设原函数是f(t),则自相关函数为:

其中*表示卷积。
设2个函数分别为f(t)和g(t),则互相关函数定义为:

它反映的是2个函数在不同的相对位置上互相匹配的程度。
本算法的中心思想是以统计的观点将图像看成二维信号,采用统计相关的方法寻找信号间的不相关点,利用2个信号相关函数值的大小反映了待检测图和模板图之间的相似程度。此方法是直接利用图像的灰度值度量两幅图像之间的相似性,用某种相似性度量,判定两幅图像中的对应关系,只对图像的灰度进行处理,避免了主观因素的影响,换句话说就是在待检测图中是否有同模板不一样的尺寸和方向的目标物,并通过一定的运算来找到它,以及其在待检测图中的坐标位置的过程。模板就是一幅已知的小图像,通常模板越大,搜索速度越慢;模板越小,搜索速度越快[9]。
由于弹丸目标的灰度值较背景的要小,因此,若是模板图像与待检测图像逐行做相关运算,则互相关函数值越小与模板的相关性越小,与所需提取的目标信息越接近。表现在互相关函数效果图中,正确的目标位置往往会出现一个“陡”的谷。由于各种外在因素的影响,并不是所有的像素都能提供准确的信息,例如饱和像素,就会对目标的提取造成一定的干扰,往往在处理中将图像进行截取,可更快速地提取目标信息。
2.2.2 算法流程
a.将光源图像每列求和,取平均的行向量作为模板。
b.模板与待测图像逐行做相关运算。
c.绘制互相关运算后的效果图[10]。
d.提取弹丸目标的位置信息。
2.2.3 实弹弹丸仿真结果
图6是以线阵CCD所得数据为处理对象,以行向量、互相关函数值为横、纵坐标。由图6可知,在24行相关处理结果有个明显的下降,变化幅度比较大,有一个较“陡”的“谷”,说明此行与模板不相关,从而确定目标的位置信息。虽然在效果图中也出现了很多“谷”,但其出现得特别缓慢,由于弹丸飞行速度极快,多数情况下摄像机只能拍到1~2场的图像信号,所以不可能出现缓慢的下降,排除其为目标位置。

图6 互相关处理效果
3 结束语
提出了一种互相关法提取高速目标信号的方法。首先介绍了一般的基于线阵CCD的测量方法,然后回顾和分析了传统的提取高速目标信号的方法,在此基础上提出了基于互相关的新方法,通过对实际采集的弹丸图像的处理,证明了该方法具有很高的准确性和适用性,受噪声的影响小,同时缩短了算法的运行时间,可以应用在一些实用性要求比较高的场合。
[1]雷志勇,刘群华,姜寿山,等.线阵CCD图像处理算法研究[J].光学技术,2002,28(5):475-477.
[2]施浣芳,雷志勇,高宏尧,等.高速运动物体飞行参数的CCD测量方法研究[J].西安工业学院学报,2000,20(4):259-263.
[3]王 锋,曹剑中,周仁魁,等.飞行目标姿态测量中的图像处理方法[J].光子学报,2006,35(11):1780-1782.
[4]达争尚,施沅芳.线阵CCD尺寸测量信号的提取[J].西安工业学院学报,2000,20(1):35-38.
[5]Zhao Chunjiang,Shi Wenkang,Deng Yong.A new Hausdorff distance for image matching[J].Pattern Recognition Letters,2005,26(5):581-586.
[6]Chen Jiunhung,Chen Chusong,Chen Yongsheng.Fast algorithm for robust template matching with M-estimators[J].IEEE Transactions on Signal Processing,2003,51(1):230-243.
[7]张 强,王正林.精通 Matlab图像处理[M].北京:电子工业出版社,2012.
[8]章毓晋.图像处理[M].北京:清华大学出版社,2005.
[9]阮秋琦.数字图像处理学[M].北京:电子工业出版社,2001.
[10]陈桂明,张明照,戚红雨.应用 Matlab语言处理数字信号与数字图像[M].北京:科学出版社,2001.
猜你喜欢
建材发展导向(2022年23期)2022-12-22
广东石油化工学院学报(2022年4期)2022-09-13
建材发展导向(2022年12期)2022-08-19
小学生必读(中年级版)(2021年12期)2021-12-02
制造技术与机床(2018年12期)2018-12-23
电子制作(2018年18期)2018-11-14
电气化铁道(2016年4期)2016-04-16
中国房地产业(2016年24期)2016-02-16
中国卫生(2015年9期)2015-11-10
弹箭与制导学报(2015年1期)2015-03-11
