旋轮线奇点特性及其在平面凸轮机构中的应用条件
2013-09-22 03:33程金石
大连工业大学学报 2013年5期
程 金 石
(大连工业大学 机械工程与自动化学院, 辽宁 大连 116034)
0 引 言
与滚子啮合的平面凸轮的理论廓线可以看做是滚子中心所生成的旋轮线[1]。当滚子中心位于所在传动轴瞬心线[2]上时,旋轮线上必然存在奇点。通常认为,旋轮线在奇点处的曲率为无穷大,对应的凸轮实际廓线上会产生干涉现象。所以,凸轮廓线设计中必须回避奇点[3-5]。
然而,旋轮线在奇点处的曲率并非一定为无穷大。通过控制瞬心线在奇点附近的形状参数,旋轮线在该点的曲率可能成为有限值,甚至零值。本文根据旋轮线在奇点处的切线方向和曲率大小等特性,论证只要设计特殊的速比函数,就可以使旋轮线在奇点处曲率为零。此时,旋轮线其中一侧的等距曲线不发生干涉,该等距曲线作为凸轮实际廓线是可行的。本文还进一步导出旋轮线奇点曲率为零的速比条件,为旋轮线应用于凸轮机构提供依据。
旋轮线在奇点处还具有一个重要的几何特性:切线方向与瞬心线法线方向重合。在平面凸轮机构中,可使凸轮滚子在奇点附近啮合时压力角很小,甚至为零。因此,这一特性对改善凸轮机构传动性能有独特的应用价值。
旋轮线奇点可应用于平面间歇机构。如外槽轮机构中直槽对称线的内端点即为销子中心所形成旋轮线上的奇点。槽轮机构只能用于低速、低精度场合。对于更有普遍意义的平行分度凸轮机构[6-8],受瞬心线形状特性和机构结构形式限制,凸轮理论廓线上不允许存在奇点。因为若存在奇点则曲率必为无穷大。所以任意滚子运动到回转中心连线上与凸轮啮合时压力角为90°[9]。双作用式平行分度凸轮机构[10]通过改变结构形式利用奇点解决上述问题。根据本文所设计的特殊速比函数,控制从动凸轮理论廓线在奇点处的曲率和啮合的压力角为零,可以使这种新型分度机构获得良好的传动性能。
1 奇点存在条件
含有滚子的平面凸轮机构中,传动轴的相对运动可以用与之固联的瞬心线的相对纯滚动来表示[2],见图1。图中C1、C2分别为滚子和凸轮所在传动轴的瞬心线;P为滚子中心;C1、C2的切点C为瞬心,对于平行轴传动,C始终位于回转中心连线上[2]。在瞬心线相对纯滚动过程中,点P在平面C2上所成的旋轮线Γ即为凸轮理论廓线。
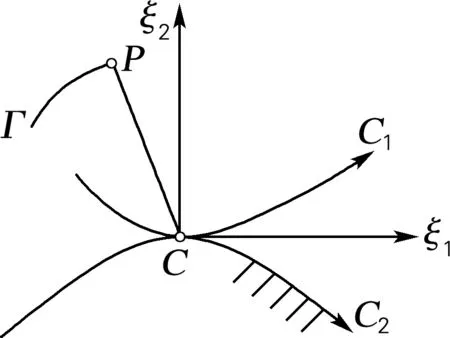
图1 旋轮线示意图
设点P相对于C1的位置用Frenet坐标[1]u1=u1(s)、u2=u2(s)表示,s为弧长参数,则Γ在平面C2上的方程R(s)可表示为
R(s)=r2(s)+u1ξ1+u2ξ2
(1)
式中:r2(s)为C2上对应参数s的点,ξ1、ξ2为r2(s)处Frenet坐标轴单位矢。对公式(1)求导,并利用Cesàro不动条件[1]化简,得Γ的切矢
R′(s)=kr(u2ξ1-u1ξ2)
(2)
式中:kr=k1-k2,称为瞬心线的诱导曲率,k1、k2分别为C1、C2在点s处的曲率。由公式(2)可以得到以下结论:
(1)R′(s)垂直于矢量CP=u1ξ1+u2ξ2。这说明旋轮线的法线过对应瞬时的瞬心。该结论为确定凸轮廓线法线方向提供了有利工具。
(2)当u1=u2=0时,R′(s)=0。这说明瞬心产生的旋轮线在该瞬时为奇点。所以位于瞬心线上的点所成的旋轮线上必存在奇点。
结论(2)应用于平面凸轮机构即得凸轮理论廓线奇点存在条件:与凸轮啮合的滚子的中心位于所在传动轴的瞬心线上。根据奇点对应的瞬时特点可以得出,凸轮理论廓线在奇点处与凸轮瞬心线相交。
2 奇点几何特性
设旋轮线上存在奇点Q,为方便起见,将坐标原点取在点Q并令此时参数s为零,则旋轮线在点Q附近的泰勒展开式为
(3)
式中:R′(0)、R″(0)、R(n)(0)为旋轮线在奇点处的一阶、二阶及n阶导数。对公式(1)逐阶求导,并代入Frenet公式[1]、Cesàro不动条件以及奇点条件u1=u2=0,得R′(0)、R″(0)及以后各阶导数为
(4)
上述各阶导数的取值情况决定旋轮线在奇点处的几何特性。
2.1 切线方向
令公式(3)对参数s求导并注意到R′(0)=0,得旋轮线在奇点附近的切矢为
(5)
对于相对纯滚动的瞬心线,诱导曲率kr必不为零,即矢量R″(0)≠0。这样,当参数s趋近于零时,矢量R′(s)的方向即奇点处切线方向完全取决于R″(0)的方向。而由公式(4),R″(0)的方向始终沿凸轮瞬心线上对应奇点处的法线方向ξ2。于是,凸轮理论廓线在奇点处的切线方向与凸轮瞬心线在对应点的法线方向相同。
2.2 奇点性态
旋轮线在奇点处的各阶导数中,设第1个不为零的导数的阶数为p,第2个不为零且方向与R(p)(0)不平行的导数的阶数为q,则奇点性态决定于p、q的取值。根据公式(4),必有p=2,所以旋轮线在奇点附近可表示为
(6)
过奇点Q在凸轮平面内以矢量R″(0)、R(q)(0)为坐标轴建立坐标系,则旋轮线在奇点附近的性态见图2。由图中可见,旋轮线的奇点性态为尖点。当q为奇数时,奇点两侧分支位于R″(0)异侧,见图2(a);当q为偶数时,奇点两侧分支位于R″(0)同侧,见图2(b)。

图2 旋轮线在奇点附近的性态
2.3 奇点曲率
严格地说,旋轮线在奇点处因切矢为零而使曲率失去意义。但是,可以用曲线上无限接近奇点的点的曲率的极限表示奇点处弯曲程度,并仍将其称为“曲率”。为此,令公式(6)对参数s连续求导2次,分别得
(7)
(8)
代入到曲率计算公式
(9)
并令s趋近于零,所得k值即为旋轮线在奇点处的曲率。分析公式(9)中分子、分母无穷小s的次数可见,曲率k是无穷小s的(q-4)次函数。根据q的取值,旋轮线在奇点处的曲率可存在以下3种情况:
(1)q<4时,k→∞,即曲线在奇点处的曲率为无穷大。
(2)q=4时,k是无穷小s的0次幂,即曲率为有限量。
(3)q>4时,k=0,即曲线在奇点处的曲率为零。
可见,旋轮线在奇点处的曲率并非一定为无穷大。当满足条件q>4时,奇点处曲率为零。而由公式(4),q的取值完全取决于瞬心线在奇点处的曲率及其各阶导数。若瞬心线在奇点处满足条件
(10)
则曲线在奇点处第2个不为零且与R″(0)不平行的导数为R(5)(0),此时q=5,奇点处曲率为零。公式(10)即为奇点曲率为零的瞬心线条件。
3 奇点的应用条件
由于存在曲率为零情形,奇点在一定条件下可得到应用,如图3所示的双作用式平行分度凸轮机构。该机构在输入轴上布置单个输入滚子1和输入凸轮2,在输出轴上布置输出凸轮3和分度数个输出滚子4。机构存在输入滚子和输出凸轮、输入凸轮和输出滚子2对啮合关系。其中输入滚子和输出凸轮的啮合在分度运动的前半程起正驱动作用,后半程起负驱动作用。在以惯性负载为主的分度机构中,这对啮合副因始终承担惯性负载而称为主啮合副,直接决定机构传动性能。

1,输入滚子;2,输入凸轮;3,输出凸轮;4,输出滚子
为实现良好的传动性能,机构在主啮合副中有效利用了奇点。即将输入滚子中心布置在对应于分度中点的主动瞬心线上,并使机构的瞬心线在分度中点满足条件(10)以避免凸轮实际廓线产生干涉。这样,当输入滚子中心运动到回转中心连线上或连线附近时,凸轮滚子啮合的压力角为零或接近于零。加之啮合点到输出轴回转中心的距离整体较大,使机构的承载能力得到提高。此外,输出轴上滚子总数较少也使停歇阶段主动凸轮对输出轴的锁定作用加强。
然而,该机构的速比函数必须满足特殊条件,以使瞬心线在分度中点满足公式(10)。在运动规律关于分度中点对称条件下,速比及其一阶导数在分度中点必有
(11)
(12)
式中:A为两回转轴的中心距,a为输入滚子中心到输入轴回转中心的距离。此时,公式(10)中2k′1-3k′2=0自然满足。所以速比函数只需使k1-2k2=0即可。为此,将分度中点处输入和输出瞬心线曲率
(13)
(14)
代入k1-2k2=0并化简得
(15)
公式(11)、(12)、(15)即为双作用式平行分度凸轮机构的速比条件,亦为奇点在平面凸轮机构中应用的速比条件。由于现有运动规律不能满足这组条件,相关速比函数必须经过特殊设计。
上述理论和方法已用于双作用式平行分度凸轮机构原型机的研制,初步试验结果证实了其有效性。
4 结 论
(1)旋轮线的奇点条件是发生点位于所在瞬心线上。奇点处切线方向与瞬心线在对应点的法线方向相同。曲率则可能存在无穷大、有限值和零值3种情形,具体情形与瞬心线形状有关。
(2)曲率为零的奇点可以在机构中得到应用。双作用式平行分度凸轮机构将主啮合副中的滚子中心布置在主动瞬心线上,通过设计特殊的速比函数,使凸轮理论廓线在奇点处曲率为零。该结构形式有效克服了现有结构形式的不足,改善了机构的传动性能。
(3)本文分析曲线奇点特性的方法对其他类型曲线奇点的研究具有借鉴作用。奇点对其他平面凸轮机构也具有一定应用价值。
[1] 佐佐木重夫. 微分几何学[M]. 苏步青,译. 上海:上海科学技术出版社, 1978:13-37.
[2] 李特文. 齿轮啮合原理[M]. 卢贤占,译. 上海:上海科学技术出版社, 1984:16-67.
[3] QIU Hua, LIN Changjun, LI Ziye. A universal optimal approach to cam curve design and its applications [J]. Mechanism and Machine Theory, 2005, 40(6):669-682.
[4] BISWAS A, STEVENS M, KINZEL G L. A comparison of approximate methods for the analytical determination of profiles for disk cams with roller followers [J]. Mechanism and Machine Theory, 2004, 39(6):645-656.
[5] 林荣富,常勇. 作平面运动滚子从动件盘形凸轮机构的第Ⅱ类凸轮轮廓设计[J]. 机械设计, 2013, 30(1):28-32.
[6] 张玉华. 新型平行分度凸轮机构的综合与仿真[J]. 机械科学与技术, 2004, 23(8):919-926.
[7] 冯光林,曾宪荣. 基于Inventor2009的盘形凸轮轮廓设计[J]. 机械工程与自动化, 2012(6):29-31.
[8] 李晓霞,赵浩东. 跃度连续的盘形分度凸轮机构虚拟样机构建[J]. 机械制造与自动化, 2012, 41(6):40-42.
[9] 汪萍,侯慕英,田野. 平行分度凸轮机构的压力角分析与计算[J]. 内蒙古工业大学学报, 1999, 18(4):241-245.
[10] 刘健,程金石,肖正扬. 双作用式平行分度凸轮机构[J]. 机械设计与研究, 2005, 21(3):38-48.
猜你喜欢
小学生学习指导(爆笑校园)(2021年10期)2021-11-01
小学生学习指导(爆笑校园)(2021年9期)2021-09-27
小学生学习指导(爆笑校园)(2021年4期)2021-04-29
军事文摘(2020年14期)2020-12-17
内燃机与配件(2020年3期)2020-09-10
高原山地气象研究(2020年3期)2020-07-16
华东师范大学学报(自然科学版)(2019年3期)2019-06-24
华东师范大学学报(自然科学版)(2018年3期)2018-05-14
光学精密工程(2016年6期)2016-11-07
汽车工程(2016年11期)2016-04-11