基于组合定位系统实现精确测量水雷雷位
2013-12-02 06:07孙向前刘百峰
舰船科学技术 2013年4期
孙向前,刘百峰,李 斌,马 一
(中国人民解放军91388 部队,广东 湛江524022)
0 引 言
水雷在进行试验考核时[1],雷位的精确测量是考核评定该型水雷的水面打击半径、攻击区域、破坏半径及近炸引信区域等关键性能指标的基础。目前尚没有对水雷雷位进行精确测量的专门测量系统,为了完成试验任务,利用靶场现有水下目标导航定位系统和差分GPS (简称DGPS)组合,实现了测量布放于海底水雷雷位的需求,达到了预期效果。本文主要通过分析该方法的定位原理,讨论消除随机误差的方法,达到进一步提高定位精度的目的[2]。经过海上工程实践表明,这是一个行之有效的水雷水下目标方位测量方法,可满足水雷位置测量定位精度要求。
1 测量系统构成及原理
1.1 测量系统构成
水雷雷位测量系统是由高精度DGPS 全套船载部分[3]和长基线水下导航定位系统部分组成。
1.2 工作原理
系统的定位原理:根据长基线定位原理[4],试验时将系统应答器捆绑在水雷上,只要精确测量应答器坐标即可知道水雷雷位。试验时,测量母船在DGPS 的引导下绕阵航行,周期性发射测阵询问声信号并接收各应答器应答声信号,实时记录“询问-应答-接收”声波时延及测量母船相应位置DGPS 坐标数据。解算时,针对各应答器,利用直角交汇原则,在相应位置提取测量船的DGPS 位置数据,通过空间曲面交汇法解算出各应答器的空间坐标。假定海底布设的应答器个数为N,测量母船以航速(vx,vy)沿航路航行,如图1所示。水声收发机周期性地发射测距询问声信号并接收各应答器应答声信号,测定各“询问一应答”信号的声双程传播时延Ti,每组时延测量确定1 个以发射点和接收点为焦点的椭球面。定位方程组为

式中:i 为应答器序号;(xi,yi,zi)为第i 个 应答器的空间位置;Ti为目标到应答器i 之间的声双程传播时延;c 为平均声速;Tdi=T0i+T1+Ti,Tdi为水声收发机发出询问声脉冲到接收到第i 个应答器的应答声脉冲为止的总时延;T0i为第i 号应答器的电路延时;T1为水声收发机的电路延时(T0i,T1试验前可通过计量测得)。
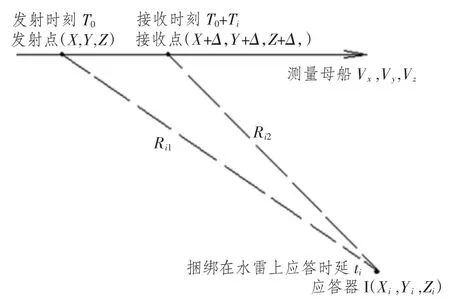
图1 长基线导航定位原理示意图Fig.1 The structure of navigation and Positioning for long base line measure system
应答器位置(xi,yi,zi)为待求未知量,其余均为已知量。母船在多个位置测量,并记录该位置坐标和水声收发机所测距离,即对于任何一个应答器都有多个测试点的位置坐标(x,y,z)和相应的距离值。求多个椭球面的共同焦点即可测量出阵元相对于大地的位置。求椭球面公共焦点法首先通过转换椭球面方程组求近似解,然后利用近似解使定位方程组变为圆方程组求解。一般来说,有3 组方程就可以解得目标精确位置。
由于水雷是布放到海底,因此应答器(水雷)的深度参数zi通常可以通过其他途径获得,一般认为是已知量;所以式(1)中除 第i 号应答器(xi,yi,zi)坐标中的(xi,yi)为待求未知量,其余均为已知量。实际上为了提高测量精度,测量母船将沿着预先规定的优化航迹在DGPS 导引下连续航行,在多个点上进行测量,并取加权平均值,以获得高精度。一般情况下,应答器(水下目标方位)位置总是概略知道,因此测量母船可以选择以下多轨迹航行[5]:
1)在目标上方选择“+”轨迹;
2)以目标为中心的圆形或正方形轨迹;
3)当目标未知时,测量母船在水声应答测距范围内任意航行。
图2 为推荐使用的水下目标方位测量航路图。

图2 水下目标方位测量航路图Fig.2 The flight path map of underwater object measure
同理,利用测距仪的频分制,可同时测量多个水雷水下目标方位的大地坐标。
2 提高水雷雷位精度的方法
在同时对多个水雷目标进行连续测量的情况下,直接利用水声测距仪接收的实时数据进行解算,则式(1)可近似为球面定位的一般形式[6]:

其中近似取:

式中:(xi,yi,zi)为第i 号 目标(水雷)的大地坐标,待测未知量;i=1,2,3,…,L 为被测量水雷目标的序列号;j=1,2,3,…,m 为数据的批号;k=1,2,3,…,n 为每批数据中的数据组序号;T 为测量母船询问Pinger 信号周期;rijk为第i 号目标相应于第j 批数据中第k 帧 数组的斜距;tijk为第j 批数据中第k 帧数组周期计算机直接从测距仪读取的第i 通道从发出测距询问声脉冲到收到应答声脉冲为止的总时延;tijk-1为第j 批数据中第k-1 帧数组周期计算机直接从测距仪读取的第i 通道从发出测距询问声脉冲到收到应答声脉冲为止的总时延;c 为平均声速。
测量作业开始时,在有利航段,计算机对DGPS 和水声测距仪同步采集m 批数据(每批有n 个数据组)。例如,第i 号目标的第j 批数据的第k 号数据组表示为(xjk,yjk,z0,rijk),z0是船载声头深度,近似为固定值。将这些数据代入式(2),则每个目标可得到m×n 个解,剔除虚解后,进行加权平均,则可以消除随机误差,提高定位精度。
以下是对有利航段和加权平均的诠释[4]。
当目标相对于2 个测量点的视角接近于90°时,圆交汇的定位误差最小,这一点是很容易证明的。因此,在航行测量过程中对某一目标可形成正交交汇或接近正交交汇的航段称为有利航段;而对大量测量结果进行平均时,对越接近正交交汇的数据组,应给予较大的权重,即根据交汇角大小作加权平均。对任意2 个测量点p(j,k)和q(m,n),其测量数组为(xjk,yjk,z0,rijk)和(xmn,ymn,z0,rimn),即分别为j批的k帧数组和m 批的n 帧数组,按余弦定理目标对p 和q 的视角为
式中:

分别为母船测量点p 和q 到目标斜距的平方及2 个测量点间距的平方。尽管式(4)中的(xi,yi,zi)为待求量,但在作视角估算时,可以取未经平滑处理的解算结果粗值。于是定义权系数

第i 号水雷位置坐标通过如下加权平均后确定:
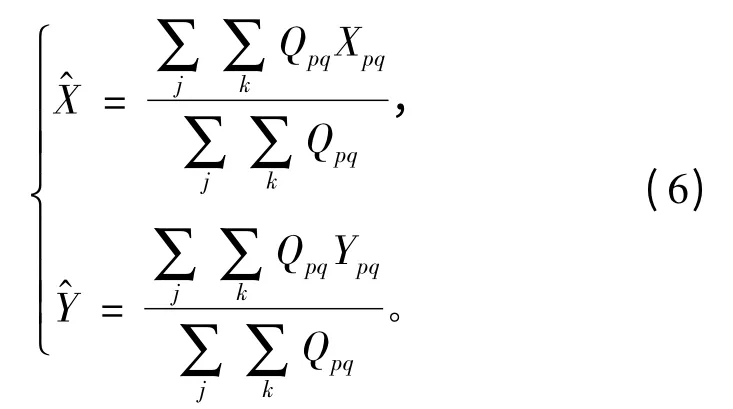
式中:j 为所有用来参与定位解算的批数据;k 为某批数据中用来参与定位解算的数据组;(Xpq,Ypq)为p 和q 两测量点对i 号水雷位置的解算值;Qpq为p 和q 两测量点的权系数;为加权平均后的i 号水雷位置坐标。
3 水雷雷位测量海上工程实施及精度验证
3.1 水雷与应答器绑定方案
应答器要用绳索绑定[7]在“水雷-沉块”这一连接体中间(见图3)。另外,试验中还须注意以下几点:
1)水雷所使用释放器的询问频率不能与应答器询问频率一致或相近,以免产生不必要的干扰。
2)应答器绑定位置应当满足当测量母船在测量区录取数据时,应答器的应答信号不会被雷体遮蔽。
3)与应答器捆绑好的水雷应在布雷船同一舷布放。
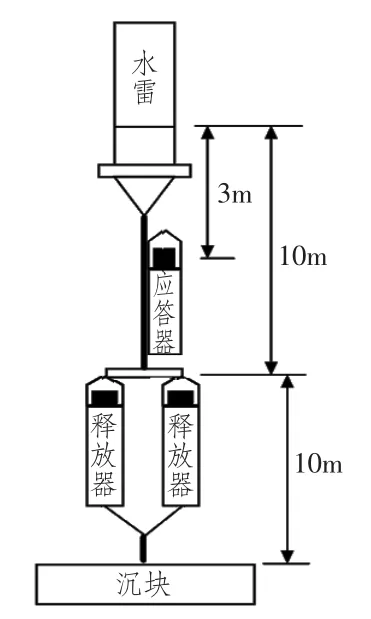
图3 应答器与水雷捆绑示意图Fig.3 The sketch map of responder and mine trussed
3.2 海上水下目标方位测量实施过程
根据试验实施方案设定布雷线路,应答器与水雷绑定后,布雷船在DGPS 引导下航行到预定水雷布放点,听候口令布放第1 个水雷,DGPS 记录下实际布放点坐标;同理,依次布放其他水雷。布雷完毕后,根据DGPS 记录的水雷布放点位置设定水下目标方位测量航路,由DGPS 引导测量船以小于4 kn航速按此路线航行,水下目标方位组合测量系统对水下目标方位实施测量,计算机实时记录相关的测量参数。全部数据测量录取完毕后,测量船听令停机或机动,水下目标方位组合测量系统对测量数据进行回放分析、解算校准水下目标方位。
3.3 测量精度验证
由于目前尚没有更有效的、更精确的手段测量水雷的绝对地理坐标,因此无法对本文所讨论的测量系统精度进行计量校准,只能利用长基线系统定位原理对测量母船进行定位,测量结果与船载DGPS 结果进行比对[8]。取应答器的大地位置坐标测量结果(xi,yi,zi)为阵元位置参数,利用该测量系统对测量母船实行反向定位测量,通过水下应答器阵解算出测量母船的轨迹与DGPS 测绘的测量母船轨迹相比较就能反映该组合测量系统对水雷的定位精度。
图4 是在南海某海域试验中使用半矩阵型航路测阵后给运动目标导航的轨迹,其中1#、2#、3#、4#应答器构成了一个小的测量阵,利用半矩形阵航路对海底应答器进行测阵。测阵完毕,利用应答器的测阵结果对测量母船进行导航。目标船以小于5 kn航速在阵中低速航行。

图4 海试结果Fig.4 The result of examination on the sea
经过事后解算处理,将DGPS 对测量母船测量的轨迹与利用应答器对测量母船反向测量的轨迹比对统计。从图4 中可以看到,2 条测量曲线基本重合,深色线为导航轨迹,浅色线为DGPS 测量结果。结果表明精度满足水雷设计定型试验时雷位测量要求。
4 结 语
本文叙述的组合定位测量系统是利用长基线导航定位系统测阵原理与DGPS 组合实现的,解决了因没有专业的水雷雷位测控设备而无法给出精确雷位的问题。是利用现有测控装备功能进行扩展应用的一成功实例。在海上工程中的成功应用,证明是行之有效的测量方法,具有较高的工程实用价值。
[1]李启虎.水声学研究进展[J].声学学报,2001,26(4):295-301.
[2]李守军,包根生,吴水根.水声定位技术的发展现状与展望[J].海洋技术,2005,24(1):131-135.
[3]田坦,刘国枝,孙大军.声纳技术[M].哈尔滨:哈尔滨工程大学出版社,1996.
[4]王先华.长基线水下导航定位系统测阵校阵及系统集成[D].哈尔滨:哈尔滨工程大学,2004.
[5]KUSSAT N H,CHADWELL C D,ZIMMERMAN R.Absolute positioning of an autonomous underwater vehicle using GPS and acoustic measurements[J].IEEE Journal of Oceanic Engineering,2005,30(1):153-164.
[6]R.J.尤立克.水声原理[M].洪申,译.哈尔滨:哈尔滨船舶工程学院出版社,1990.
[7]李莉.长基线阵测阵校阵技术研究[D].哈尔滨:哈尔滨工程大学,2007.
[8]李小民.GPS 在水下定位应用中的几个关键问题研究[R].中科院声学研究所,2002.34-40.
LI Xiao-min.Investigations on several key problems for the applications of GPS in underwater positioning[R].Report of the post doctor research,IOA of Chinese Science Academy,2002.34-40.
猜你喜欢
舰船科学技术(2022年10期)2022-06-17
广东教学报·教育综合(2022年45期)2022-05-05
铁路通信信号工程技术(2021年12期)2021-12-31
数字海洋与水下攻防(2020年5期)2021-01-04
数字海洋与水下攻防(2020年5期)2021-01-04
数字海洋与水下攻防(2020年5期)2021-01-04
铁道通信信号(2020年9期)2020-02-06
船舶标准化工程师(2019年5期)2019-11-11
中国水运(2019年9期)2019-09-28
电子制作(2017年19期)2017-02-02