机械手的运动学分析及在屏幕贴合中的应用
2014-02-17 00:49陈亮
机器人技术与应用 2014年2期
陈 亮
(上海交通大学,上海,200240)
机械手的运动学分析及在屏幕贴合中的应用
陈 亮
(上海交通大学,上海,200240)
在机械手屏幕贴合项目中,以6关节机械手RV-2F为研究对象,分析结构和连杆参数,采用改进D-H法建立各连杆坐标系和机械手的运动学方程;运用MATLAB Robotics Toolbox建立RV-2F机械手模型,进行关节空间轨迹规划与仿真,实现并分析机械手高速运行的平稳性,满足应用要求。
机器人,改进D-H参数,运动学,MATLAB Robotics Toolbox,轨迹规划
0 引言
近年,随着台式电脑、笔记本电脑、平板电脑、智能手机等快速发展与普及,加之劳动力成本快速上升,3C制造工厂使用机械手搬运装配的需求越来越大。机械手不仅任劳任怨,而且加工产品质量稳定,速度快、效率高,非常适合工厂连续运行。本文结合三菱电机最新RV-2F垂直多关节型6轴机械手贴合平板电脑屏幕与底座的应用,建立机械手运动学模型,通过分析调整机械手运行速度、加速度,以达到平滑运行完成装配任务。
1 设备工艺与方案分析
屏幕贴合示意图如图1所示。在前一道工序,屏幕背面部分位置已经涂胶,并通过连接线与平板电脑底座连接,此时屏幕与底座成一定角度摆放,传送带将其输送到下一工位后,工人需要一手握住底座,一手拿住屏幕粘贴到底座中,并让四周间隙均匀,误差在0.05mm以内。人工贴合经常因四周间隙不匀而重贴,效率低。

图1 屏幕贴合示意图
考虑此工艺要求精度较高、工件较轻,我们采用视觉定位、RV-2F机械手抓取来实现贴合操作。通过吸盘抓取屏幕,升高一定间隙,转动小角度后露出底座对角,A、C两个对角CCD相机拍摄底座对角位置,计算获取中心位置和角度;机械手再次调整姿态使屏幕水平,B、D两个CCD相机拍摄获取屏幕中心位置和角度;通过计算后,机械手调整屏幕姿态,将屏幕贴合在底座上。由于CCD相机安装支架与机械手很近,机械手操作范围狭小,而生产现场又要求高速高精度,运行平滑稳定,整个系统设计要求较高。
2 机械手运动学分析
RV-2F为6自由度机械手,且6个关节都是转动关节,前3个关节确定手腕参考点位置,后3个关节确定手腕的方位,后3个关节轴线交于一点,从结构上说属于连杆串联型机械手。在机械手末端加装吸盘,吸附住屏幕等部件可完成相应作业。每个关节有1个自由度,关节由驱动器驱动,其相对运动带动连杆的运动,使机械手末端到达所需的位置。基座称为连杆0,连杆1与基座由关节1相连接,连杆2与连杆1通过关节2相连接,依此类推。根据改进D-H法,可得图2连杆坐标系。相应机械手的连杆参数如表1所示。

图2 RV-2F及改进D-H法连杆坐标系

表1:改进D-H法连杆参数
可得连杆变换矩阵

各连杆变换矩阵相乘,得机械手变换矩阵

对应运动学方程

式(1)表示RV-2F机械手变换矩阵,构成了此机械手运动分析和综合的基础。在图2中,机械手就绪状态下,

与图示情况完全一致。
3 MATLAB运动学仿真
在MATLAB Robotics Toolbox V9.8中,可以运用Link和SerialLink命令建立串联多连杆机构。Link函数的调用格式为L=Link([theta, d, a, alpha, sigma],'modified'),其中前4个参数theta、d、a、alpha分别表示关节角、连杆偏置、连杆长度、扭角;Sigma代表关节类型:0表示转动关节,1表示移动关节;'modified '代表采用改进D-H参数,不添加表示默认标准D-H参数。SerialLink函数的调用格式较多,name命名多连杆机构。按照上一节建立的连杆参数,编程如下:
L(1) = Link([ 0, 0.295, 0, 0, 0], 'modified')
L(2) = Link([ 0, 0, 0, -pi/2, 0], 'modified')
L(3) = Link([ 0, 0, 0.23, 0, 0], 'modified')
L(4) = Link([ 0, 0.27, 0.05, -pi/2, 0], 'modified')
L(5) = Link([ 0, 0, 0, pi/2, 0], 'modified')
L(6) = Link([ 0, 0.07, 0, -pi/2, 0], 'modified')
deg = pi/180 %以下属性qlim为关节角度限制
L(1).qlim=[-160 160]*deg
L(2).qlim=[-210 30]*deg
L(3).qlim=[0 160]*deg
L(4).qlim=[-200 200]*deg
L(5).qlim=[-120 120]*deg
L(6).qlim=[-360 360]*deg
RV2F = SerialLink(L, 'name', ' RV-2F')
qr= [0 -pi/2 0 0 pi/2 0 ]
RV2F.plot(qr)
执行程序,即可得到RV-2F仿真示意图如图3所示。通过正运动学指令RV2F.fkine(qr) 计算,此与式(2)计算完全一致。
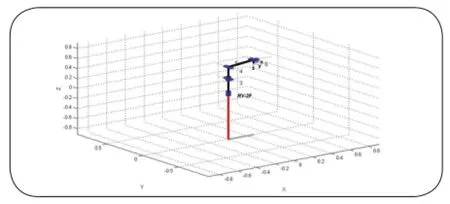
图3 RV-2F仿真示意图
4 轨迹规划仿真
在频繁屏幕装配时,机械手要求重复定位精度较高,这就要求运行平稳,各关节角位移、角速度和角加速度连续,避免因突变冲击造成误差。MATLAB Robotics Toolbox中对应有jtraj五次多项式轨迹规划指令,可实现此功能。这里取机械手等待位置、抓取位置关节坐标分别为q1、q2,相应MATLAB程序及说明如下:
q1 =[0 -1.5908 0.2029 0 1.3879 0]
q2 =[0 -1.5708 0.3662 0 1.2046 0]
t = [0:0.002:0.1] %要求轨迹间隔时间2ms,完成时间0.1s
q = jtraj(q1, q2, t) %五次多项式规划,路径从q1到q2
plot(RV2F,q) %显示轨迹运行模拟动画
[q,qd,qdd]=jtraj(q1,q2,t) %规划位移q,速度qd,加速度qdd
qplot(t, q) %各关节角位移规划曲线如图4所示
plot(t,q(:,5)) %关节5角位移规划曲线如图5 a所示
plot(t,qd(:,5)) %关节5角速度规划曲线如图5 b所示
plot(t,qdd(:,5)) %关节5角加速度规划曲线如图5 c所示
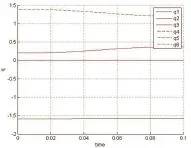
图4 各关节角位移规划曲线
由图5可见,关节5角位移从1.3879到1.2046连续变化时,起止角速度零、角加速度为零、t=0.05s时角速度到负最大,角加速度在初始、中间、结束时间为零,其间出现一负一正两个极值。此规划机械手位移曲线平滑,速度和加速度连续,运行比较平稳。
通过属性teach示教与机械手运行实测qr、q1、q2三点精度如表2所示。
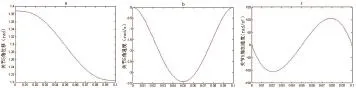
图5 关节5角位移、角速度、角加速度规划曲线

表2 :MATLAB仿真与实测位置对比表
表2中数据表明了仿真计算与实际运行中存在误差。机械手在实际搬运装配中,可通过示教器微调笛卡尔坐标下对应各关节角度确定点位,从而保证较高的定位精度。为确保达到qr、q1、q2对应空间坐标位置,实测机械手各关节角度如表3所示。

表3 :实测机械手各关节角度
对比MATLAB仿真对应关节角度可知,实际机械手计算精度误差、机械精度误差等影响机械手运行精度。
5 小结
6自由度机械手是非常有代表性、且在国内国际研究文献、实际应用都较多的机械手。本文在此主要研究探讨两点:
1)根据实际机械手结构建立6关节机械手运动学模型;
2)运用MATLAB Robotics Toolbox建立RV-2F机械手模型,并进行关节空间轨迹规划与仿真,分析实现了机械手高速运行的平稳性,满足了客户的生产要求。
[1] 蔡自兴.机器人学[M].北京:清华大学出版社,2009.
[2] Craig J J.机器人学导论[M]. 北京:机械工业出版社,2006.
[3] Corke P. Robotics, Vision and Control[M]. Germany: Springer-Verlag Berlin and Heidelberg, 2013.
[4] Corke P, Robotics Toolbox for MATLAB (Release 9.8)[EB]. http://www.petercorke.com/robot, 2013-02.
猜你喜欢
机电信息(2021年17期)2021-07-01
内燃机与配件(2020年22期)2020-09-10
河北省科学院学报(2020年1期)2020-05-25
液压与气动(2020年4期)2020-04-10
重型机械(2019年3期)2019-08-27
制造技术与机床(2018年11期)2018-11-23
课程教育研究·学法教法研究(2018年14期)2018-08-11
新课程·下旬(2018年10期)2018-01-28
科学与财富(2018年34期)2018-01-15
光学仪器(2016年5期)2017-01-12