日本机器人最新专利摘要选编
2014-02-17 00:49
机器人技术与应用 2014年2期
日本机器人最新专利摘要选编
一、【发明名称】履带式行走探测机器人
【专利编号】JP 2014-19210 A
【公开日期】2014.2.3.
【申请人】日本产业技术综合研究所
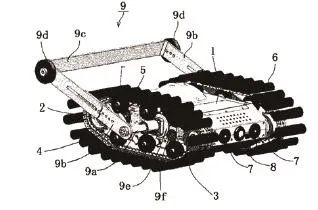
为能在恶劣和有台阶的环境中,利用机器人进入危险环境或者进入人不能进入的狭小环境,拍摄内部状态,或者进入因灾害倒塌的房屋内搜寻受害人,或者按照所要求的路线行走,准确到达预定的目的地,目前广泛采用的是具有良好旋转性能的履带式行走探测机器人。
本发明实现的小型、结构紧凑、低成本的履带式行走探索机器人,能够准确跨越较高台阶,安装在车体前部的CCD照相机能够自由调整拍摄角度。
本发明采用的方法是,在履带行走装置车体1的两侧,在驱动轮2和从动轮3的车轴之间装配的机械臂9,其两个支轴9a能够自由转动。当履带4迈台阶时,安装在车体1前方的CCD照相机8能对台阶的上方和下方的环境进行摄像,使安装在机械臂9d前方的机械臂9c沿履带4的前下方或者是后下方转动,靠其对外部环境的压力控制车体的倾斜角度。
【选择附图】
【图中符号说明】
1 车体
2 驱动轮
3 从动轮
4 履带
5 导向滚轮
6 履带板
7 LED
8 CCD照相机
9 机械臂
9a 支轴
9b 机械臂
9c 机械臂
9d 滚轮
9e 减速齿轮
9f 驱动齿轮
二、【发明名称】机器人及其搬运装置
【专利编号】JP 2014-30857 A
【公开日期】2014.2.20.
【申请人】 艾普森株式会社
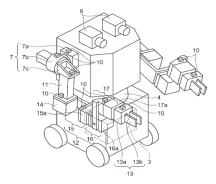
【摘要】本发明是有关机器人以及搬运装置的技术。机器人在移动或停止时,由于加速度的原因,机械臂和机械手等可动部件会产生振动,机器人需要等待振动减弱后才能启动下一个动作。因此,减小可动部件的振动就能缩短机器人的待机时间。另外,为了提高机器人的定位精度,机器人也要求振动小。
本发明提供一种能够采用少数几个传感器就能检测多个可动部件振动的机器人。该机器人机构具有上腕部11和驱动上腕部11的肩关节部件7,在肩关节部件7上装配有可以装卸、检测腕部11振动的惯性传感器的传感器插座10;在传感器插座10上,有对准上腕部件11调整惯性传感器方向的对位装置。这样就能用少的传感器检测多个部件的振动。
【选择附图】
【图中符号说明】
3 机器人位姿振动控制器
4 驱动旋转部
6 摄像装置
7 肩关节部
7a 前后旋转部
7b 左右旋转部
7c 腕部连接装置
10 传感器插座
11 上腕部
12 下腕部
13 机械手
13a 机械手主体
13b 机械手抓握部件
14 肘关节
15 第1下腕部
15a 第1下腕部的旋转机构
16 第2下腕部
16a 第2下腕部的旋转机构
17 第3下腕部
17a 第3下腕部的旋转机构
三、【发明名称】真空处理装备以及运转方法
【专利编号】 JP 2014-36025 A
【公开日期】2014.2.24.
【申请人】日立株式会社高技术部
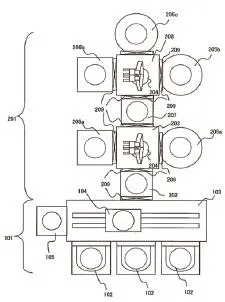
【摘要】本发明是一采用连杆方式的真空处理装置,该装置能够防止异物附着在未处理的硅片上。该发明在闸室后方的前后方向上连接数个可搬运的真空容器,在真空容器间配置有能够存放硅片的中间室,以及连接各个真空容器的处理单元。在搬运过程中,真空搬运机器人能够将和真空容器连接的处理单元中的硅片,从前道工序搬运到和同一个真空容器连接的后道工序处理容器中,进行后道工序处理。
【选择附图】
【图中符号说明】
101 大气侧部件
102 盒子载物台
103 箱体
104 大气搬运机器人
105 定位单元
201 真空侧部件
202 闸室
203 第1真空搬运室
204 真空搬运机器人
205 灰化处理单元
206 清洗单元
207 真空搬运中间室
208 第2真空搬运室
209 闸阀
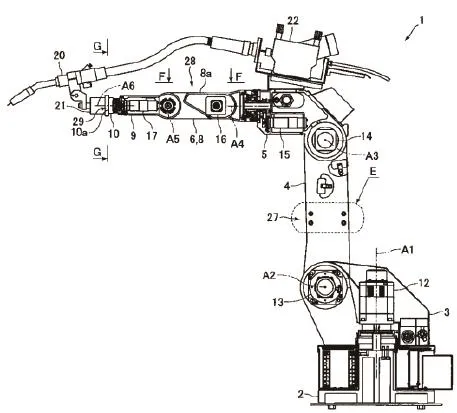
四、【发明名称】垂直多关节机器人及基准定位方法
【专利编号】JP 2014-46416 A
【公开日期】2014.3.17.
【申请人】日本电产 SANKYO 株式会社
【摘要】本发明提供一种能够缩短基准定位作业时间的垂直多关节机器人以及基准定位方法。
该垂直多关节机器人的主要组成部件为,安装在底座2上能够旋转的旋转机座3,安装在旋转机座3上、在基端面上能够旋转的第1机械臂4,安装在第1机械臂4的前端面上、能够在基端面上旋转的第2机械臂5,安装在第2机械臂5前端面上、能够在基端面上旋转的机械手6。该垂直多关节机器人还具有以下几种部件:在第1机械臂4上具有安装水准仪的第1水准仪安装部件27,在第2机械臂5上具有安装水准仪的第2水准仪安装部件28,机械手6上至少具有一个第3水准仪安装部件29。
【选择附图】
【图中符号说明】
1 机器人
(垂直多关节机器人)
2 底座
3 旋转机座
4 第1机械臂
5 第2机械臂
6 机械手部件
8 旋转部件
8a 搭载面
9 摇动部件
10 工具安装部件
10a 前端面
12-17 电动机
20 焊枪
21 托架
22 给丝装置
27 水准仪安装部件
(第1水准仪安装部件)
28 水准仪安装部件
(第2水准仪安装部件)
29 水准仪安装部件
(第3水准仪安装部件)
F-F 标志面
G-G 标志面
A1-A6 关节轴
猜你喜欢
中老年保健(2021年5期)2021-08-24
中老年保健(2021年6期)2021-08-24
中老年保健(2021年7期)2021-08-22
上海计量测试(2019年5期)2019-11-04
上海医学(2019年1期)2019-04-13
制造技术与机床(2018年11期)2018-11-23
制造技术与机床(2017年4期)2017-06-22
通信电源技术(2016年1期)2016-04-16
地球(2016年5期)2016-04-14
河南科技(2014年11期)2014-02-27