疯狂的“小强”
2014-08-11 12:33pvcbot
中学科技 2014年6期
pvcbot


一般智能机器人都需要用单片机芯片借助程序来控制,简单一点的也需要由电阻、电容、晶体管之类的电子元器件组成的电子电路来控制。本期,介绍一个采用非常简单的电路来控制的智能避障机器人,它不需要单片机芯片,仅由电池、开关、电机组成的基础电路构成。所谓“避障”即自动避开障碍物,实际上就是遇到障碍物时会转弯掉头。机器人在运动时,看起来有点像一只发狂乱窜的“小强”,所以将它命名为疯狂的“小强”。
驱动原理:
避障机器人采用带转向功能的三轮驱动方式,两个前轮是主动轮,负责输出动力,一个后轮是从动轮,起到平衡的作用。只要控制前面两个轮子的转动方向,就可以控制整个机器小车行进的方向,这也就是差速转向控制:
(1)左右两个前轮都向前转,则小车向前方直线前进;
(2)左右两个前轮都向后转,则小车向后方直线倒退;
(3)左前轮向后转,右前轮向前转,则小车在原地向左侧转向(逆时针);
(4)左前轮向前转,右前轮向后转,则小车在原地向右侧转向(顺时针)。
电路原理:
避障机器人的前端引出两根用钢丝做成的触须,一左一右各连接到一个碰撞开关,分别控制着左右两个前轮电机的转动方向。左右触须与对应控制的电机是交叉布局的:左边的触须连接右边的碰撞开关,控制右边的电机;右边的触须连接左边的碰撞开关,控制左边的电机。
制作过程:
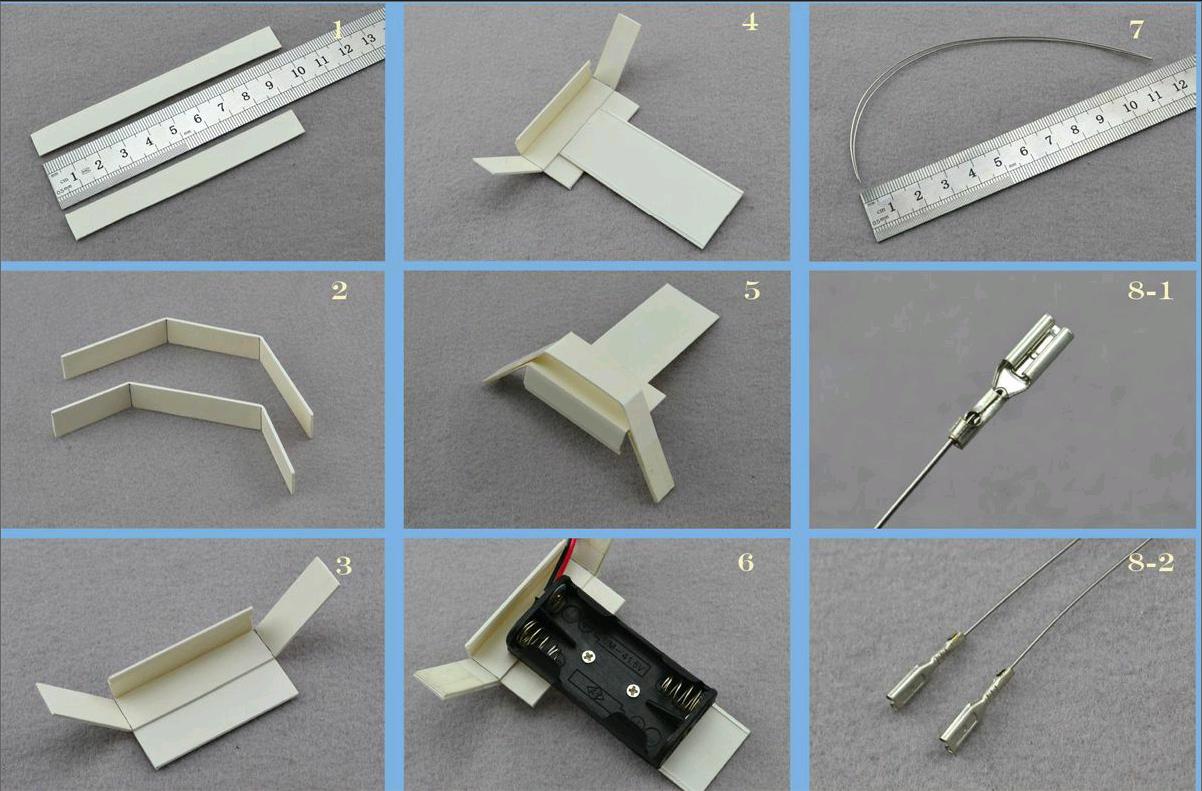
1. 选用横截面为25mm×15mm 的PVC线槽,截取长10cm的一段。把方槽的两个侧边去掉,得到一根长10cm、宽2.2cm左右的方条。沿着方条中心线把方条裁开。把其中一个长条剪短,最后得到两根分别长10cm、9cm 的长条。
2. 在10cm 的长条上分别距离一端边缘3.5cm、6.5cm 的位置画横截线,在9cm 的长条上分别距离一端边缘2.5cm、6.5cm 的位置画横截线。沿着横截线,用尖嘴钳将它们弯折成如图形状的长、短支架。
3. 截取一段长4cm的PVC方槽,把其中一个侧边剪掉,得到小车的车身前盖。如图所示,把短支架用502胶水粘贴到车身前盖内侧,其中短支架中间水平部分正好与车身前盖的横向宽度对齐。
4. 截取长6cm的一段PVC方槽,裁掉两个侧边,作为车身的顶盖。把顶盖用502胶水粘贴到车身的前盖内侧上,其中顶盖的前端正好抵住短支架的边缘。
5. 把长支架跨在车身前盖上方,然后让长支架的其中两侧的前端与同侧短支架的前端叠在一起并对齐,用透明胶带捆绑在一起。
6. 把电池盒放在车身顶盖内侧,用铅笔标记电池盒的两个固定孔,然后打孔,最后用螺丝将电池盒固定到车身上。
7. 用钢丝来制作触须。每根触须的钢丝长为10~15cm。把两根钢丝并在一起弯折,保证两根钢丝的弯折角度尽可能一致。把两根钢丝弯折成有一端倾斜较大的弧形,弧形两端距离跨度大约是12cm。
8. 把两根钢丝弧度较小的一端,用尖嘴钳往回弯折大约5mm,这样钢丝前端就类似倒钩一样,同时尽量夹扁一点。把两根钢丝的倒钩部分,固定到接线端子上,使接线端子正好与桌面垂直。
9. 把固定了触须的接线端子安装到碰撞开关上。接线端子安装到碰撞开关上后,用尖嘴钳夹住接线端子上套了碰撞开关金属弹片的部分,然后把金属弹片往上弯折成如图形状。
10. 在车身前盖的两端的直角转角处,各钻一个直径2mm的小孔,要求小孔对应到两根直角边上的距离都是5mm。用螺丝把两个碰撞开关对称固定在车身前盖上,两根触须互相交叉。
11. 调整两个碰撞开关,要求它们的倾斜角度是一样的,以保证两侧的触须伸展出去时互相对称。用手同时按压两根触须使得碰撞开关触发时(会有“滴”的一声),触须底部两侧的接线端子没有碰到一起。
12. 从塑料导线上剪下长5mm的一段,作为轴套。去掉塑料导线中的金属线,将塑料胶皮套到电机轴上,使塑料胶皮前端与电机轴前端平齐。
13. 剪一段长6mm左右的自行车气门芯胶管,套到塑料轴套外面,将其完全包裹。
14. 从电池盒的红黑导线上,分别剪下四根长3cm的导线。把这四根导线上好锡,焊接在两个电机的引脚电极上。
15. 把两个电机分别用透明胶带捆绑粘贴到前轮支架的两端。
16. 把车身顶盖后端两侧剪成斜倒角形状。松开电池盒上的螺丝,使得电池盒与车身顶盖之间有一定的缝隙。把一根黄色导线从缝隙中穿过。再把电池盒上的螺母拧紧,让电池盒与车身顶盖把导线夹紧。
17. 剪一段长1.5cm 的黑色导线,焊接到电池盒的电极上,焊接的时间不要太长,避免电池盒塑料受热变软导致金属电极弹片脱落。
18. 把黑色导线焊接到拨动开关侧边的引脚上,再把黄色导线焊接在中间的引脚上,用热熔胶把拨动开关固定在车身顶盖后端。
19. 参照电路原理图完成电路的焊接。
20. 用一个塑料小圆珠作为后轮,用拉直的回形针来制作后轮的支架,把后轮支架装到车身顶盖后端。再用热熔胶把支架与车身顶盖固定起来。
21. 截取两片长7cm、宽2cm 左右的PVC方块,剪成如图形状,作为“小强”的翅膀。截取一段PVC线槽的槽盖,剪成梯形结构,下底长3cm、上底长2cm、高2cm。把两个翅膀用502 胶水粘贴到头部上方。
22. 把两片红色垫片插到线槽轨道卡扣两端,用502胶水固定,作为眼睛。剪一段长2cm的线槽轨道卡扣,粘贴到头部下方,用卡扣扣住小车的支架,就可以把头部以及翅膀结构固定在小车顶上了。
23. 装上电池,调试机器人,确定触碰开关和电机的转向。调试结束后,再用热熔胶固定碰撞开关,避免其在运动中发生松动,疯狂的“小强”就完成了。
猜你喜欢
装备制造技术(2021年4期)2021-08-05
模具制造(2019年4期)2019-06-24
宝藏(2018年6期)2018-07-10
焊接(2016年1期)2016-02-27
设备管理与维修(2015年11期)2015-03-16
中国自行车·骑行风尚(2014年4期)2014-10-10
现代计算机(2009年10期)2009-02-23
故事作文·高年级(2009年2期)2009-02-23
小哥白尼·趣味科学画报(2006年19期)2006-07-11