PID调节在管道缺陷检测机器人控制系统中的应用
2014-08-24 02:04王伟
安徽师范大学学报(自然科学版) 2014年4期
王 伟
(北京石油化工学院 机械工程学院,北京 102617)
PID调节在管道缺陷检测机器人控制系统中的应用
王 伟
(北京石油化工学院 机械工程学院,北京 102617)
本文介绍了管道机器人PID控制方法,实现了PID控制参数的在线自动整定,完成对管道缺陷检测机器人的运动控制,保证检测机器人的平稳运行和缺陷的准确检测.试验表明,该控制方法具有很高的可靠性和有效性.
管道机器人;PID控制;伺服电机;PMAC
随着控制理论的不断发展,在电机控制方面,出现了许多新型的、智能的控制方法,例如基于人工神经网络的控制、PID控制、遗传算法控制等,在众多控制方法中,PID控制在机器人工业领域应用比较广泛,是普遍采用的一种控制方法,自计算机进入控制领域以来,用数字计算机代替模拟计算机调节器组成控制系统,不仅可以用软件实现PID控制算法,而且使PID控制更加灵活[1].本文就是采用PID控制方法对管道机器人进行控制研究.
1 管道缺陷检测机器人控制系统
管道检测机器人系统如图1所示.它由机器人机械本体、图像采集系统、地面监控系统和电力供给系统四大部分组成.
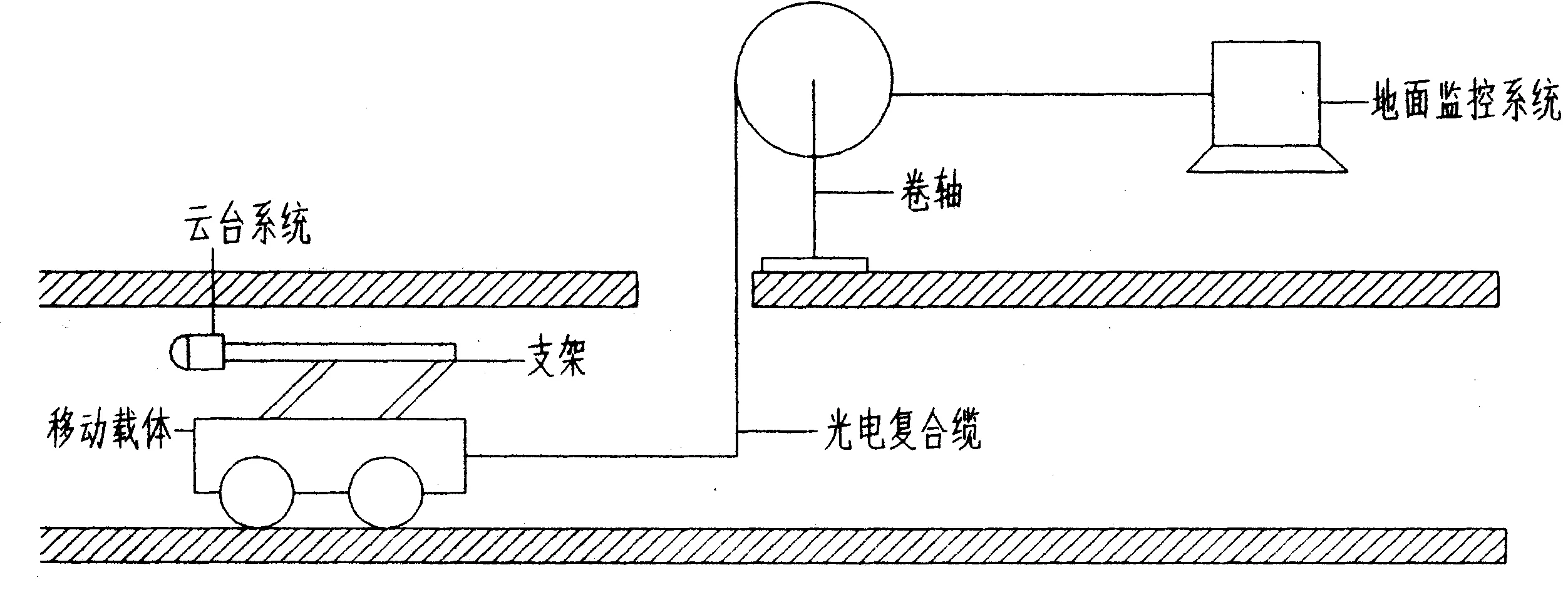
图1 管道机器人系统
其工作过程是:管道机器人通过管道检查口进入管道,在计算机发出的指令控制下以一定的速度在管道中运行,通过安装在管道机器人机械本体上的图像传感器,实时的把管道内的环境参数和管道机器人的自身状态反馈给管外的监控系统,便于操作人员掌握、控制管道机器人的工作过程[2].
管道缺陷检测机器人控制系统是保证机器人平稳行走和缺陷准确检测的核心,如图2所示.本文采用模块化分布式控制系统,选择PC机+运动控制卡(PMAC)的控制模式,以PC机作为上位机,实现信息处理与人机交互的作用,根据电机的型号设定相应的控制模式及输出控制指令;以运动控制卡(PMAC)作为下位机,实现机器人的运动控制功能[3].
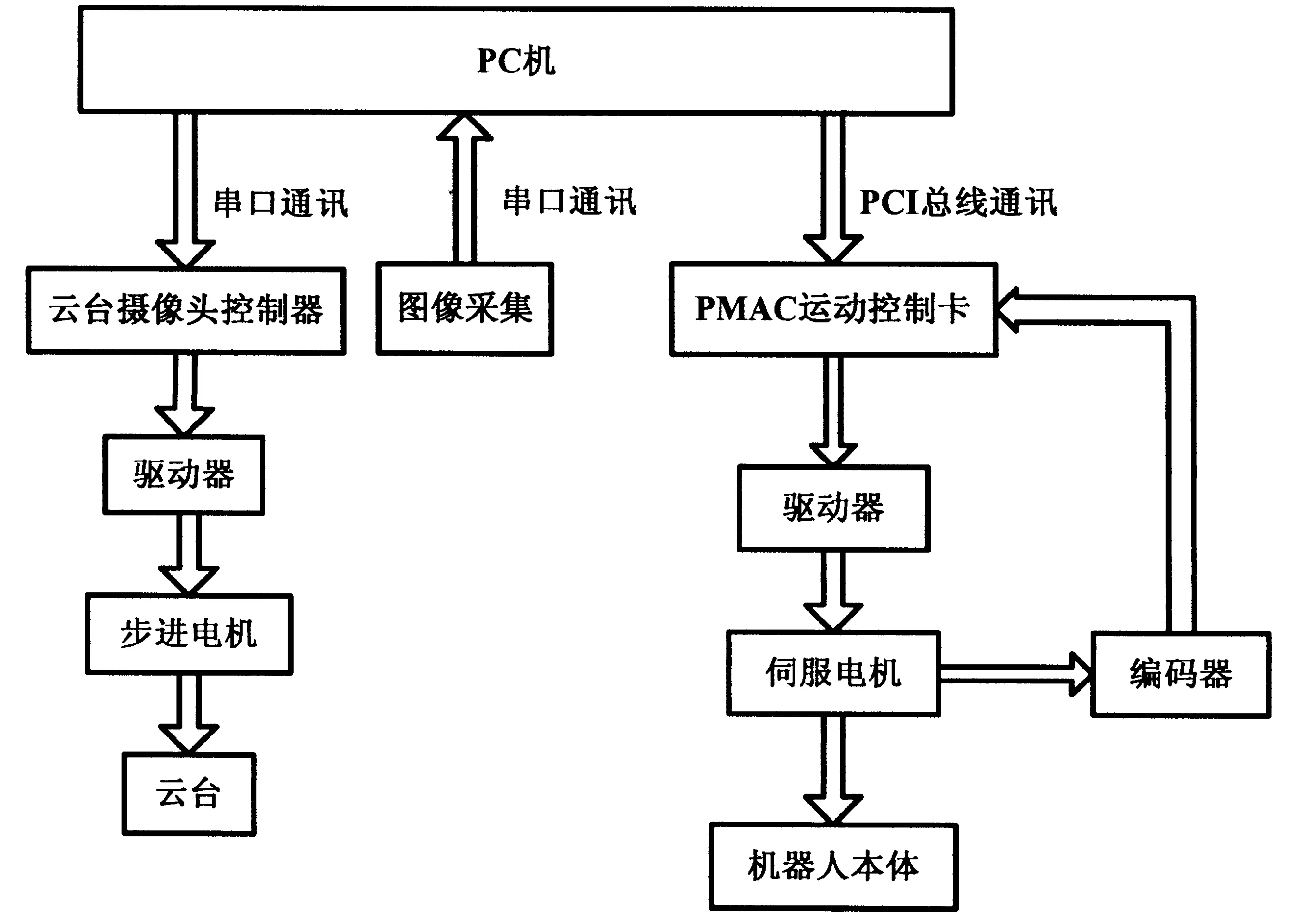
图2 管道检测机器人控制系统
为了获得系统良好的动态特性和静态特性,在管道缺陷检测机器伺服电机系统中采用了两套PID控制,即伺服驱动器与电机之间的PID调节和控制板卡与驱动器、电机之间的PID调节,这两套PID调节在系统运行时同时产生作用,前者完成粗调,后者完成细调,首先要进行的是驱动器和电机的PID调节,当此PID参数调试完成后,再进行控制板卡的PID调节,使得电机运行的更安全、平稳[4].PID调节的关键是比例系数、微分系数、积分系数等参数的选定.
2 PID参数选定
2.1伺服驱动器的PID参数的选定
首先进行伺服驱动器本身的PID的调节,即粗调,调节方式可分为两种:手动和自动,手动调节即按照PID的曲线图像以及电机实际的运行状态手动调节各个参数,这个对工作人员要求比较高,需要有一定的工程经验,因为电机在不同位置,不同负载的情况下PID的参数调节是不一样的,所以一般对于初调者不宜采用,一般使用第二种调节方法,即系统自动调节.图3是安川伺服驱动器的PID参数自动调节界面.PN100、PN101、PN102分别对应着比例系数、积分系数和微分系数,实现伺服驱动器与电机之间的PID调节.
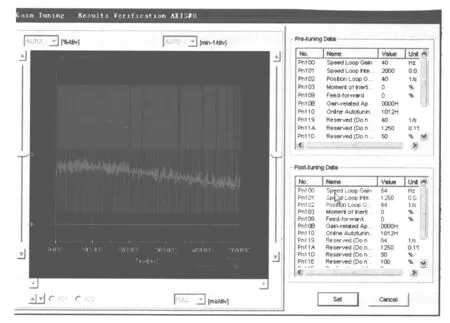
图3 伺服驱动器PID参数自动调节
2.2PMAC的PID参数的选定
当伺服驱动器的PID调节结束后,再进行运动控制卡(PMAC)的PID参数调节,即细调.PMAC本身提供了PID参数调节软件PEWIN TUNING,调节界面如图4所示.
通过给伺服电机一个阶跃信号,观察系统对阶跃信号的响应,通过PEWIN TUNING软件自动生成的调试曲线图及统计出衡量系统性能的指标数值,可以对系统的稳态性能及动态品质有个准确的把握.在用阶跃信号来调试反馈增益时,主要调整PMAC卡参数Kp(比例系数Ix30)、Ki(微分系数Ix31)、Kd(积分系数Ix32)的数值.从图4中可以看到各个参数的数值,可以手动改动,每改变一个参数值可以让电机试运行,查看参数修改后的曲线图,然后根据结果继续修改,直到合适为止(如图5所示).
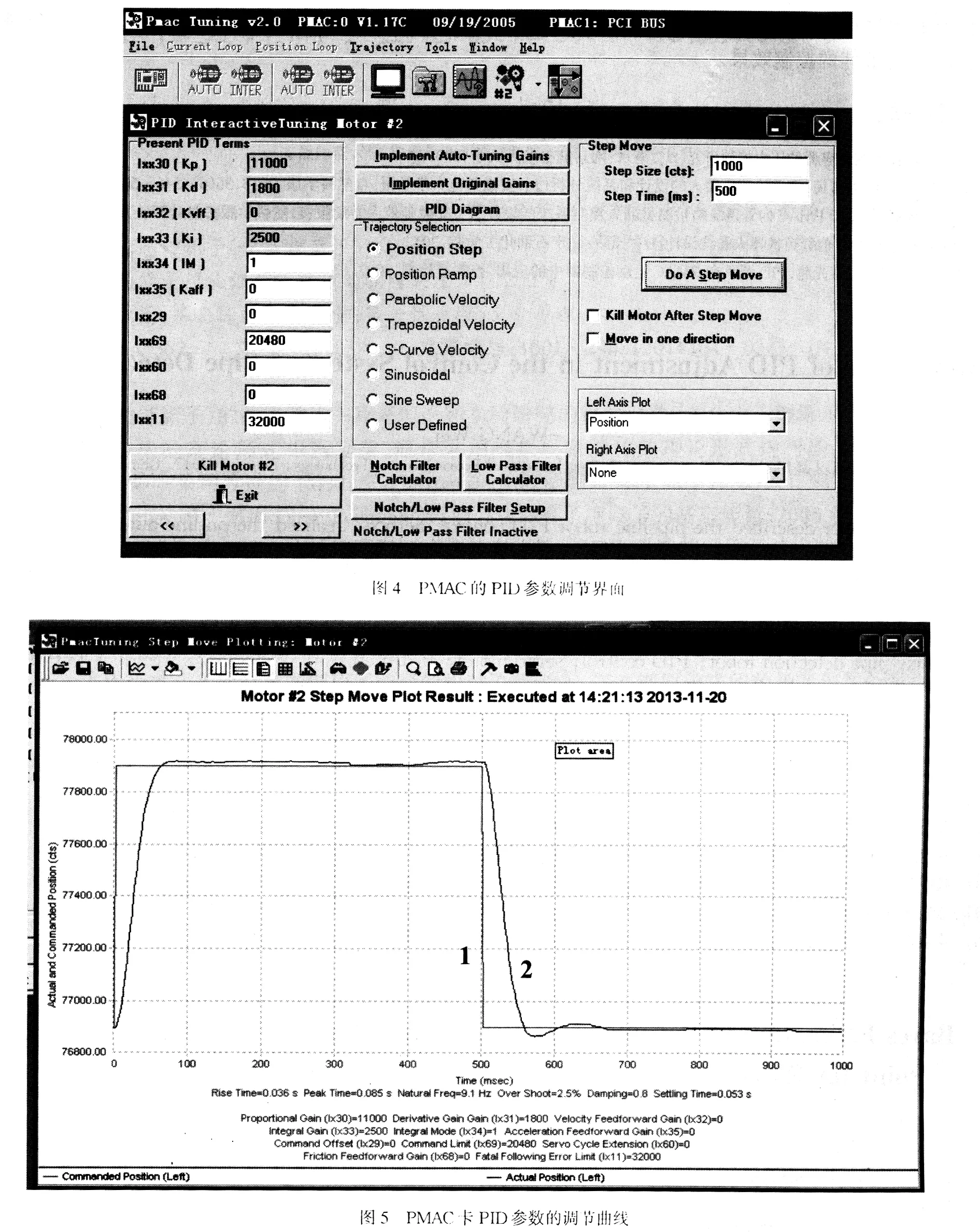
图5中,1代表命令值,2代表响应值,从图中可以看出,命令值和响应值基本符合,但是在TIME=570ms时,存在一定的震动,响应不是很准确,还有就是在时间刚开始的时候,响应速度不是特别快,可以根据图像反应的问题进一步调节Kp、Ki、Kd.对于本文的管道机器人系统经过反复调试选择调节参数为Kp=11000、Kd=1800、Ki=2500.
3 结论
通过管道缺陷检测机器人控制系统的PID参数整定,可使系统运行平稳,实现管道缺陷的准确检测.应用PEWIN TUNING软件系统,通过阶跃响应曲线还可以获得控制系统的各项性能指标;在调节PID的过程中,要根据管道机器人实际工作指标调节,不能漫无目的的调节,通过试验的方法对控制器PID参数进行整定,以获得最佳的控制效果.
[1] 唐君君.较大容积容器的压力控制研究[D].南京:南京航空航天大学,2009.
[2] 王伟,封立泽,刘占民.管道检测机器人的设计和系统分析[J].安徽师范大学学报:自然科学版,2013,36(6):546-549.
[3] 王伟,林顺英.基于PMAC的管道缺陷检测机器人控制系统的设计[J].安徽师范大学学报:自然科学版,2014,37(1):43-46.
[4] 唐鹏.基于PMAC的管道机器人系统设计[D].抚顺:辽宁石油化工学院,2012.
[5] 朱立达,朱春霞,蔡光起.PID调节在PMAC运动控制器中的应用.控制与检测,2007,(2):50-53.
Astract: This paper described the pipeline robot PID control method, realized the on-line automatic setting of PID control parameters, achieved the motion control of the pipeline detection robot and ensured the accurate defect detection and the smooth operation of the inspection robot. Tests showed that this control method had high reliability and validity.
ApplicationofPIDAdjustmentintheControlSystemofPipeDetectionRobot
WANG Wei
(School of Mechanical Engineering, Beijing Institute of Petro-Chemical Technology, Beijing 102617, China)
pipe detection robot; PID control; servo motor; PMAC
2014-03-25
国家自然科学基金(51275051).
王伟(1968-),女,北京市人,副教授,硕士,从事测量与控制方面的教学和科研工作.
王伟.PID调节在管道缺陷检测机器人控制系统中的应用[J].安徽师范大学学报:自然科学版,2014,37(4):339-342.
TP242
A
1001-2443(2014)04-0339-04
猜你喜欢
青少年科技博览(中学版)(2022年11期)2023-01-07
汽车维修与保养(2021年8期)2021-02-16
电脑爱好者(2020年6期)2020-05-26
天津教育·下(2018年9期)2018-07-13
北京航空航天大学学报(2017年5期)2017-11-23
自动化仪表(2017年8期)2017-08-30
光学精密工程(2016年5期)2016-11-07
工业设计(2016年4期)2016-05-04
西安交通大学学报(2014年7期)2014-04-16
汽车与新动力(2013年1期)2013-03-11