
惯性稳定平台载体扰动抑制算法研究
2014-09-06 02:24,,,
机械与电子 2014年5期
, , ,
(华中科技大学机械科学与工程学院, 湖北 武汉 430074)
惯性稳定平台载体扰动抑制算法研究
祁士森,方昉,罗欣,陈学东
(华中科技大学机械科学与工程学院, 湖北 武汉 430074)
0 引言
飞机在飞行的过程中,由于气流的影响会发生颠簸、摇摆和晃动,由此造成运动敏感的机载成像跟踪设备,如摄像机、照相机和激光瞄准仪等,成像模糊。为了改善机载跟踪设备的成像质量,需要采用惯性稳定平台将这些机载设备的视轴与飞机机体相隔离,使视轴的位姿在惯性参考系下始终与被跟踪目标保持恒定[1]。惯性稳定平台从20世纪40年代末开始用于机载跟踪设备,目前,国外惯性稳定平台的稳像精度大多已在100μrad以下[2]。国内对惯性稳定平台的研究起步较晚,20世纪90年代初才开始机载惯性稳定平台的研制。目前,国内稳定平台的稳像精度一般在100~300μrad之间[3],与国外存在较明显的差距。
惯性稳定平台精度要求的进一步提高,对稳定平台的控制精度提出了挑战。在稳定平台工作过程中,会受到包括摩擦干扰力矩、载体扰动力矩、模型参数变化等扰动的影响[4],其中,载体扰动为影响平台性能的主要因素[5]。为抑制扰动对平台的影响,需要设计合适的控制算法,对此,学者们进行了大量的研究。Hilkert等人综述了自适应控制方法在惯性稳定平台中的实用性[6],该算法能使控制器跟踪模型参数变化,针对模型参数变化自动调节控制作用,但该算法比较复杂,且不能较好地抑制载体扰动。Moorty等人利用H∞控制方法和模糊控制方法设计了稳定平台控制器,稳像精度可达到80μrad[7-8],H∞鲁棒控制虽可获得较好的鲁棒稳定性和抗干扰性能,但在设计中既保证鲁棒稳定性又兼顾稳像精度是一个不易解决的问题。对于以模糊控制、神经网络控制为代表的智能控制方法,其特点是不需要知道精确的系统模型,有较好的智能性和鲁棒性,但是这些方法在设计中很少利用系统模型信息,设计缺乏针对性,使得控制性能难以得到进一步提高。
以某型号惯性稳定平台为研究对象,分析了影响惯性稳定平台稳像精度的扰动因素,针对扰动设计相应的控制算法加以补偿。由于惯性稳定平台实际运行中的扰动具有多变化、不确定和随机性,无法预见和直接测量[9]。因此,引入扰动观测器抑制扰动对于惯性稳定平台稳像精度的影响。另外,由于载体扰动形式为正弦角加速度,为进一步抑制其对系统精度的影响,针对性的设计了重复控制算法。通过Simulink仿真的方法对控制算法进行验证,结果表明,该复合控制算法可以有效的提高稳定平台的稳像精度,并具有较好的适应性。
1 惯性稳定平台系统分析
惯性稳定平台的工作原理如图1所示。平台主要包括陀螺轴、反射镜轴、钢带和基座等,陀螺轴和反射镜轴平行。由于反射镜具有光学二倍角的特性。因此,陀螺轴和反射镜轴之间通过2∶1的钢带减速器传动,以便陀螺仪的读数与瞄准线角度变化一致。传动钢带由上下两片钢带组成,每一片钢带的两端通过螺栓和压片扣压在陀螺轴和反射镜轴的传动轮上。陀螺轴上安装DTG陀螺作为速率感应元件,安装力矩电机作为俯仰稳定的驱动部件,当平台因为载体扰动θd摆动时,测量平台视轴的角运动,通过控制力矩电机,抵消引起平台视轴运动的干扰力矩,从而保证平台稳像精度[10]。
根据图 1所示的稳定平台的受力情况,可得到惯性稳定平台陀螺轴和反射镜轴的动力学方程分别为:
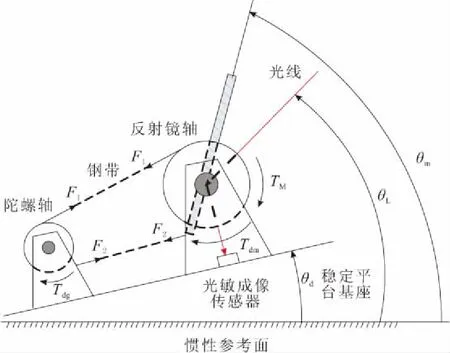
图1 惯性稳定平台工作原理
(1)
TM为电机的输出转矩;Tdm为反射镜轴上的干扰转矩(主要表现为摩擦力矩的形式);Tdg为陀螺稳定轴上的干扰转矩;F1和F2分别是上下钢带的张紧力;Jm和Jg分别是反射镜轴和陀螺稳定轴的转动惯量;反射镜轴的半径R和陀螺轴的半径r的关系为R/r=2。
根据稳定平台传动几何关系,有
(2)
θm/b和θg/b分别为反射镜轴和陀螺稳定轴相对于稳定平台载体的转角,θg,θm和θL分别为陀螺轴、反射镜轴和入射光线相对于惯性参考面的转角。
由图 1可知,瞄准线相对于惯性参考面的角度为θL=θd+2θm/b,实现瞄准线稳定即为维持θL稳定。
用ωL表示入射光线相对于惯性参考平面的旋转角速度,以βd表示载体扰动的角加速度。将式(2)代入到式(1),并进行拉普拉斯变换,得到以角速度为输出变量的关系式为:

(3)
以期望的瞄准线运动角速度ωin为控制输入,以瞄准线的角速度ωL为输出量,设伺服电机及其控制器的综合传递函数为Gi,陀螺仪传递函数为Gg,可构建如图 2所示的反馈控制系统框图。
系统的闭环模型为:
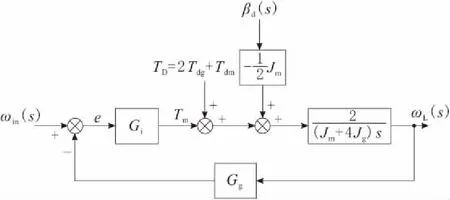
图2 惯性稳定平台反馈控制系统
(4)

式(4)表明,惯性稳定平台的瞄准线角速度ωL受到载体惯性扰动βd和其他干扰力矩TD影响。为了保证瞄准线稳定,需要设计控制系统对各种干扰力矩进行补偿。
2 惯性稳定平台控制器设计
2.1 扰动观测器设计
由式(3)可知,惯性稳定平台的模型为纯积分环节,如果观测器中使用标称逆模型,必然会包含微分环节,这样会放大噪声,从而影响系统的鲁棒性和控制精度。因此,将采用平台标称模型设计观测器。扰动观测器的基本思想是:由控制量u可知,通过平台的标称模型Gs可以计算出激励出的平台速度响应部分,从平台的速度响应ωL中剔除掉这部分,就可以估计出由力矩扰动TD和载体角加速度扰动βd带来的平台速度响应部分ωd。将ωd通过补偿器Gd等效为补偿电压ud,叠加在控制量u中,从而补偿了扰动对平台性能的影响,提高平台对于扰动抑制的速度和精度。设计出的控制系统结构如图 3所示。
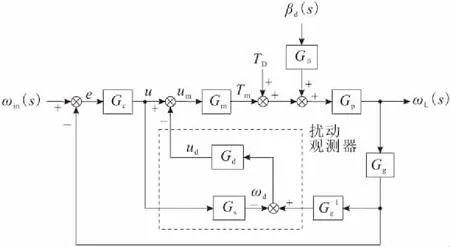
图3 引入扰动观测器的稳定平台控制系统结构
Gp为平台真实模型,可以通过系统辨识得到;Gc为控制器;Gm为电机模型;Gβ为载体加速度扰动对于平台的传递函数;um为输入给力矩电机的实际驱动电压。
由图 3可得,扰动观测器的数学表达式为:
ud(s)=[ωL(s)-u(s)Gs(s)]Gd(s)
(5)
从图 3可以获得引入扰动观测器的惯性稳定平台控制系统的输入输出关系为:
ωL(s)=

ωin(s)+

TD(s)+

βd(s)
(6)

(7)
同样,可以推出未引入扰动观测器的惯性稳定平台控制系统的输入输出关系为:
(8)

2.2 重复控制器设计
设计的插入式重复控制器,其控制系统结构如图4所示。
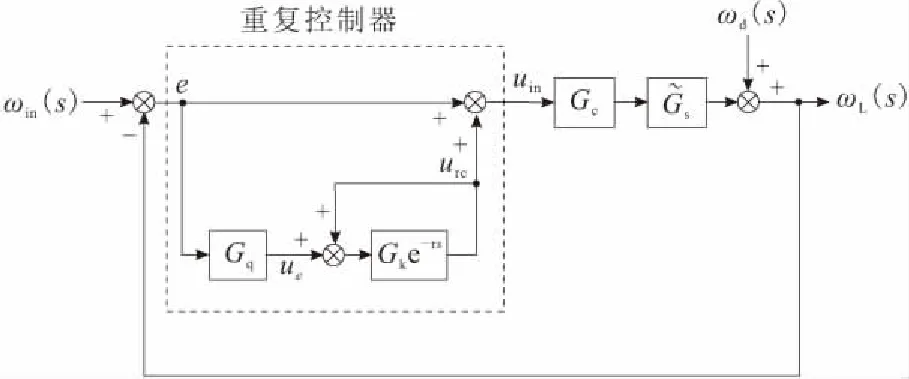
图4 重复控制器结构
图中虚线方框内为重复控制器;Gq为低通滤波器,用来减小系统在高频段的增益,防止系统输出在高频段出现振荡。另外,为避免因建模存在的误差,破坏系统的稳定性,加入积分系数Gk,从而增强系统稳定性和鲁棒性[11]。由图 4可得,重复控制器内模产生函数为:
(9)
控制算法为:
uin(s)=urc(s)+E(s)
(10)
根据图 4计算可得:
E(s)=e-τs[1+G(s)]-1[Gk(s)G(s)(1-Gq(s)]+Gk(s)]E(s)+[1+G(s)]-1[Dr(s)-Dd(s)]
(11)
这样就得到图4的等价框图,如图5所示。
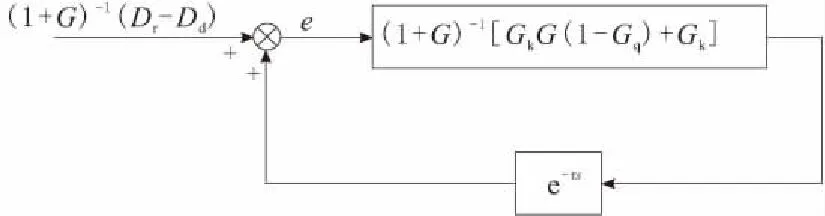
图5 重复控制系统等价
根据小增益定理,得到重复控制系统稳定性的充分条件为:
|[1+G(s)]-1[Gk(s)G(s)(1-Gq(s))+Gk(s)]|<1
(12)
从图 4可以推导出引入重复控制的惯性稳定平台控制系统的输入输出关系为:
(13)
3 仿真结果
设计惯性稳定平台复合控制系统结构如图6所示。虚线方框分别为重复控制器和扰动观测器。
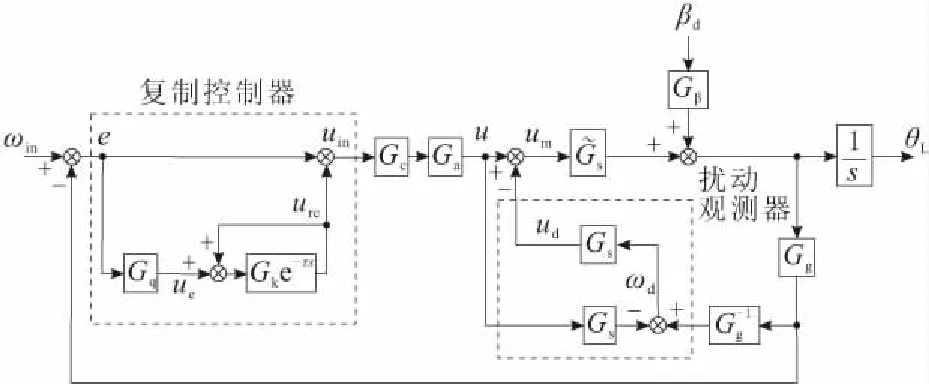
图6 惯性稳定平台复合控制系统结构
通过系统辨识实验,得到某型号惯性稳定平台的线性系统传递函数为:
载体扰动对于平台输出影响的传递函数为:

根据辨识所得稳定平台传递函数,设置控制器参数,如表1所示。其中,Gc采用PID控制器,且仅使用P环节。
图7给出了在2 Hz,120°/s2的角加速度载体扰动影响下,仅用PID控制器 、加入扰动观测器及加入重复控制和扰动观测器复合控制器的控制精度对比。由对比结果可以看出,稳像精度由3.5 mrad提高到60μrad。

表1 控制器仿真参数
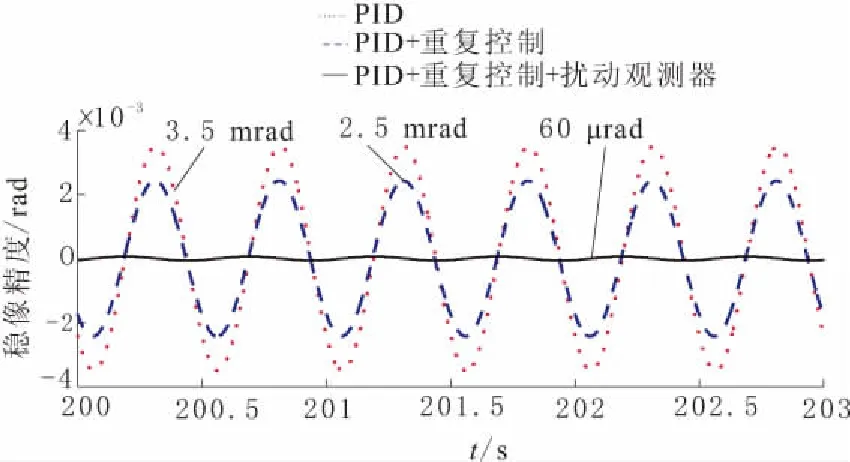
图7 频率2 Hz正弦扰动稳像精度对比
考察控制器对于不同频率的载体扰动的适应能力,并对比不同控制算法对于平台的稳像效果,对比结果如表 2所示。从表中可以看出,引入扰动观测器明显提高了平台的稳像精度,重复控制则能进一步提升平台的性能。当载体扰动频率高于5 Hz时,稳像精度小于20μrad,具有很好的控制效果。
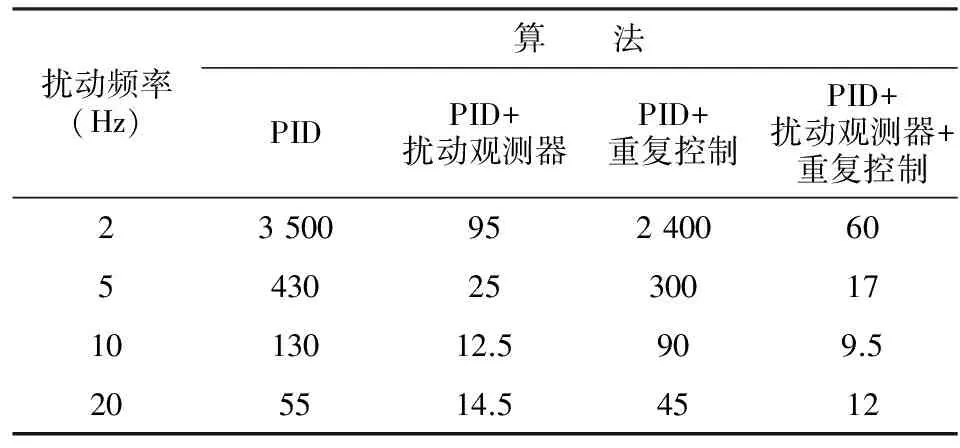
表2 不同控制算法稳像精度对比 μrad
4 结束语
分析了影响惯性稳定平台稳像精度的扰动因素,对惯性稳定平台进行了动力学建模。以稳定控制算法为研究重点,针对影响平台稳像精度的扰动因素,提出了基于扰动观测器和重复控制的复合控制算法。使用Simulink对不同控制算法进行验证。仿真结果表明,在相同情况下,单独加入扰动观测器或重复控制器都能有效抑制载体扰动的影响,且扰动观测器的效果更好,复合控制算法则能进一步提高平台稳像精度。当载体扰动频率高于5 Hz时,稳像精度小于20μrad。在载体扰动频率为10Hz时精度最高,可以达到9.5 μrad。设计的复合控制算法对于不同频率的载体扰动具有较好的适应性,可以有效地提高惯性稳定平台稳像精度。
[1] Masten M K.Inertially stabilized platforms for optical imaging systems[J].IEEE Control Systems,2008,28(1):47-64.
[2] 姬 伟.陀螺稳定光电跟踪平台伺服控制系统研究[D].南京:东南大学,2006.
[3] 王连明.机载光电平台的稳定与跟踪伺服控制技术研究[D].长春:中国科学院长春光学精密机械与物理研究所,2002.
[4] 沈晓洋,陈洪亮,刘 昇.机载陀螺稳定平台控制算法[J].电光与控制,2011,18(4):46-50.
[5] 黄昌霞,李 奇,姬 伟,等.高精度稳定平台伺服控制系统设计与实现[J].航空兵器,2011,(1):23-27.
[6] Hilkert J M.Inertially stabilized platform technology concepts and principles[J].IEEE Control Systems,2008,28(1):26-46.
[7] Moorty J K,Marathe R.H∞control law for line-of-sight stabilization for mobile land vehicles[J].Optical Engineering,2002,41(11):2935-2944.
[8] Moorty J K,Marathe R,Babu H.Fuzzy controller for line-of-sight stabilization systems[J].Optical Engineering,2004,43(6):1394-1400.
[9] Hilkert J M,Pautler B.A reduced-order disturbance observer applied to inertially stabilized line-of-sight control[A].SPIE Defense, Security,and Sensing[C]. Orlando:International Society for Optics and Photonics.2011.80520H-80520H-12.
[10] Hilkert J M.A comparison of inertial line-of-sight stabilization techniques using mirrors[A].Defense and Security[C].Orlando:International Society for Optics and Photonics.2004.13-22.
[11] 张晋颖.基于重复控制和 PI 双闭环控制的三相四桥臂逆变器[D].秦皇岛:燕山大学,2006.
[12] 贲 冰.基于重复控制的逆变器复合控制技术研究[D].秦皇岛:燕山大学,2007.
Research on the Carrier Disturbance Rejection Algorithm of Inertially Stabilized Platform
QIShi-sen,FANGFang,LUOXin,CHENXue-dong
(School of Mechanical Science and Engineering,Huazhong University of Science and Technology,Wuhan 430074,China)
为了减小载体扰动对机载光电设备的影响,需要设计保证惯性稳定平台稳定的控制算法。以某型号惯性稳定平台为研究对象,通过建立其机电系统的动态模型,分析了影响平台稳像精度的扰动因素,在此基础上设计了扰动观测器。此外,为有效抑制载体的周期性扰动作用,针对性地设计了重复控制算法。仿真结果表明,所提出的扰动观测器与重复控制相结合的复合控制算法能够有效地抑制载体扰动,提高系统稳像精度。
惯性稳定平台;稳像精度;扰动观测器;重复控制
In order to reduce the influence of carrier disturbances on airborne optoelectronic devices,a control algorithm is needed to guarantee the stability of the inertially stabilized platform (ISP).A type of ISP is taken as the research object.Through modeling of its electromechanical system,disturbance factors that affect the image stabilizing precision are analyzed,and a disturbance observer is designed based on this.In addition, a repetitive control algorithm is designed to suppress the periodic disturbance of the carrier.Simulation results suggest that the proposed control algorithm which combines a disturbance observer with the repetitive control can suppress carrier disturbances effectively and improve the image stabilizing precision.
inertially stabilized platform;image stabilizing precision;disturbance observer;repetitive control
2013-12-04
国家自然科学基金创新群体(51121002)
TP273
A
1001-2257(2014)05-0003-05
祁士森(1989-),男,江苏盐城人,硕士研究生,研究方向为机电控制;方昉(1983-),男,湖北武汉人,博士研究生,研究方向为动力学、机电控制等;罗欣(1968-),男,湖北咸宁人,教授,硕士研究生导师,研究方向为复杂机电系统智能控制、智能移动机器人、高性能足式机器人仿生设计与智能控制等;陈学东(1963-),男,江苏泰州人,教授,博士研究生导师,长江学者,研究方向为机电系统动力学及控制、机器人及其控制和超精密减振等。
猜你喜欢
中学生数理化·八年级物理人教版(2023年3期)2023-03-21
中学生数理化·八年级物理人教版(2022年3期)2022-03-16
制造技术与机床(2017年6期)2018-01-19
中学生数理化·八年级物理人教版(2017年3期)2017-11-09
小学科学(学生版)(2016年1期)2016-10-09
铁道科学与工程学报(2015年5期)2015-12-24
深空探测学报(2015年3期)2015-12-07
电源技术(2015年9期)2015-06-05
电测与仪表(2015年19期)2015-04-09
电测与仪表(2014年11期)2014-04-04
