
基于旋量理论的主动介入导管运动学研究
2014-09-06 02:24,,,,
机械与电子 2014年5期
, , ,,
(1.南京航空航天大学机电学院,江苏 南京 210016;2.上海交通大学医学院附属新华医院,上海 200092;2.沈阳自动化研究所,辽宁 沈阳 110016)
基于旋量理论的主动介入导管运动学研究
张健1,陈柏1,陈笋2,耿令波3,吴洪涛1
(1.南京航空航天大学机电学院,江苏 南京 210016;2.上海交通大学医学院附属新华医院,上海 200092;2.沈阳自动化研究所,辽宁 沈阳 110016)
针对介入手术操作环境几何特征各异的特点,为提高介入设备的通用性,提出一种由记忆合金丝SMA(shape memory alloy)与绳索混合驱动的模块化主动介入导管机器人。采用旋量理论和指数积POE(product of exponentials formula)方法推导建立了3关节主动介入导管运动数学模型,对介入导管机器人的工作空间及运动仿真分析,结果验证了所建立运动学模型的正确性。所采用方法大大降低了多节主动介入导管运动学模型的复杂性,为介入导管机器人的实际应用奠定了理论基础。
主动介入导管;指数积方法;运动学;运动仿真;工作空间
0 引言
近年来,微创介入手术MIS(minimally invasive surgery)发展迅速。微创介入手术是指在医学影像的引导下,将导管导丝从病人穿刺部位送至靶血管,进行相应的手术治疗[1]。在介入手术过程中,操作环境的几何特征各异,导管式介入装置通常需要因时因地定制为不同的尺寸、形状,通用性欠佳。为此,一种能随环境管腔主动变形的新型机器人化的介入导管装置的研发显得重要。Komatsubaral M等人提出了由SMA弹簧驱动的一种新型主动微导管,直径为3.5 mm,总长度为60mm。导管通过控制SMA弹簧,可以实现导管尖端至少8个方向的运动[2-3]。Jayender等人研制SMA驱动导管直径约1.5 mm,采用了3条并行SMA导线结构,并针对SMA主动导管的控制进行了大量的研究[4-6]。此外,近年来迅速发展的绳索驱动技术, 基于绳索驱动的优势,William W Cimino博士研制出了用于心脏治疗的主动导管头端[7]。
目前,绝大多数主动弯曲导管的数学模型是基于对导管弯曲轴线[8-9]的分析,建立弯曲及扭转角度与圆弧曲率的函数关系。随着介入导管机器人节数的增加,这种方法建立的数学模型将会变得十分复杂,其运动学的求解也将十分困难。
提出了一种基于记忆合金丝与绳索混合驱动技术的新型介入设备。采用旋量和指数积的方法建立了多节导管的运动学模型,并通过仿真分析验证了其准确性,在一定程度上完善介入导管机器人的设计理论。
1 混合驱动介入导管系统
系统的核心部分是模块化的介入导管,由骨架弹簧、连接件及SMA驱动器、绳索组成。SMA驱动器间隔120°分布在骨架弹簧的周围,每根SMA驱动器都连有导线,用于供电。同样,绳索驱动关节是由4根驱动绳索均匀布置在骨架弹簧的周围。介入主动导管具体结构如图1所示。
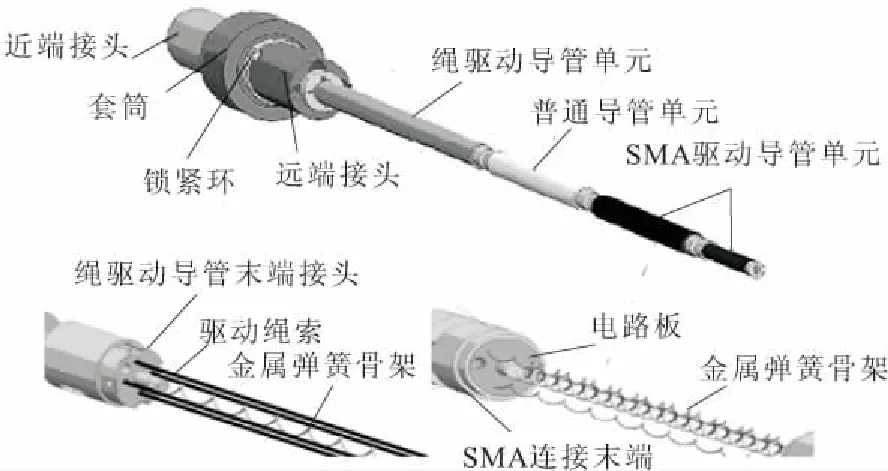
图1 介入导管结构
导管机器人具有模块化、可扩展和可重构的特点。随着导管自由度的扩展,使用传统方法建立的数学模型将变得十分复杂,其运动学的求解也将变得十分困难。
基于该介入导管机器人的运动特点,提出使用旋量和指数积的方法对介入导管机器人运动学进行描述。
2 基于旋量理论的导管运动学建模
2.1 正向运动学
利用旋量理论求解机器人运动学无需建立各个连杆坐标系,为方便描述机器人各关节单元的运动形态,将各单位旋量建立在每节导管的中点位置,θi、βi(i=1,2,3)分别表示各关节的转动和弯曲角度。图2为建立的导管机器人的坐标系。
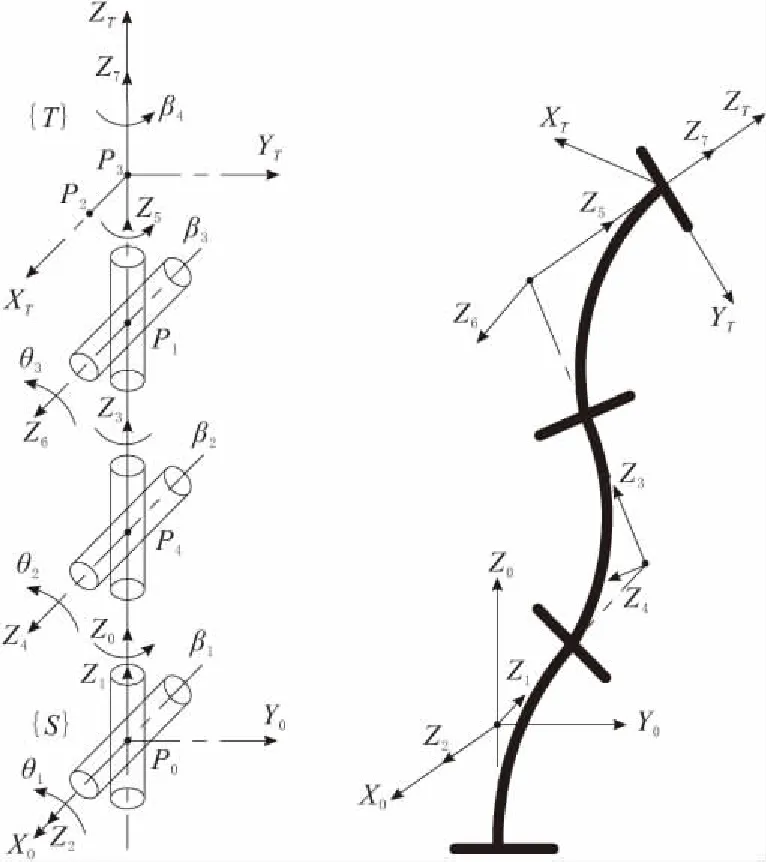
图2 3节介入导管机器人坐标系
为了准确描述多节介入导管机器人的运动形态,将每节导管的弯曲运动分解成3个转动,首先绕Z1转动β1,然后绕Z2转动θ1,最后绕Z3转动-β1。即单关节的正向运动学指数积方程为:
(1)
gST(θ,β)表示机器人的末端位姿;gST(0)表示机器人位于初始位姿时惯性坐标系与工具坐标系间的坐标变换。所有的关节运动旋量都按基座坐标系{S}描述。
(2)
依据图2所示的坐标系,可以得到各关节的旋量坐标。为简便表示多节导管的运动学方程,这里将单个关节介入导管的运动学记为:
(3)
c=cos;s=sin
具有3节导管的介入导管导向机器人正向运动学方程可以表示为:
gST(θ,β)=T1·T2·T3·gST(0)
(4)
将式(4)展开可得:

(5)
若给定工具坐标系的初始位姿以及各个关节的转角,利用正向运动学方程式(5)即可直接求得介入导管机器人的运动学正解,获得末端执行器的位姿。
2.2 反向运动学
对机器人控制及其运动学轨迹规划,获得运动学的逆解至关重要。介入导管机器人的反向运动学是指在给定末端执行器具体位姿时,求出与该位姿相对应的各关节的转角,计算出驱动各个关节转过相应角度时SMA驱动器及绳索长度的变化量。
为了求解导管机器人反向运动学方程,需要获得指数积方程。由于该导管机器人只有绕某个运动旋量坐标的纯转动。因此,可以利用该特征消去耦合的关节变量,简化求解过程,简化依据如下:
由正向运动学方程式(5)可以得到导管机器人的POE公式为:

(6)
若给定介入导管末端工具的位姿矩阵,根据所建立3关节介入导管机器人的坐标系如图2所示,各关节变量求解步骤如下所述。
第1步,求θ2。针对点p1(0,0,l1+l2+l3/2,1),依据式(7),应用位置保持不变原则,将后面2个转动关节变量从指数积公式中消掉,剩余指数积子链中仅含有4个未知变量。因此,式(6)可以化简为式(8)。
(7)
(8)
再针对p0(0,0,0,1)点,应用距离保持不变原则,消去指数积公式中与转动副相对应的角度变量,即式(8)进一步化简为:
g(θ,β)·p1-p0
(9)
由此可以得:

(10)
式(10)中只有未知角度变量θ2,所以可以用各个关节的长度l1,l2,l3表示出关节变量θ2。
第2步,求β3。同样应用位置保持不变原则,利用点p2(1,0,l1/2+l2+l3,1),p0(0,0,0,1),化简式(6)可以得::
(11)
第3步,求θ3,同样利用点p3(0,0,l1+l2+l3,1),p0(0,0,0,1),应用位置不变与距离不变原则,可将方程(6)化简为:

(12)

(13)
将式(13)左边记为q2,则式(13)变为:
(14)
式(14)表示点p4先绕Z2转动θ1到点q1,然后绕Z1转动β1,最后到达q2点,如图3所示。
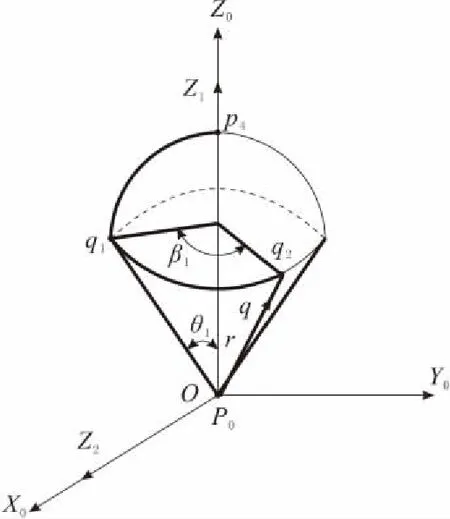
图3 点p4与q2几何关系
根据图3所示几何关系,利用向量q和向量r的数量积公式可以将θ1表示出来,即
再将式(14)进一步简化得:
(15)
第5步,求β2。前4步中各个角度变量的表达式已获得。此时,对机器人的正向运动学方程式(6)右边进行化简即得:
(16)
对上述指数积方程,利用遗传算法可求得各个关节变量的数值解。
3 导管的工作空间分析与运动仿真
3.1 导管的工作空间
根据主动介入导管机器人的结构与工作原理,相邻两个关节之间都可以通过相应的坐标系变换来建立联系,设定单个弯曲单元骨架弹簧的长度为l=30mm,可以对导管机器人的主动弯曲头端的工作空间进行分析。
图4是使用数学软件Mathematica获得的3个区域,从下向上依次为第1、2、3关节末端的工作空间。由此可知:该介入导管机器人了主动弯曲头端工作空间较大,有利于利于给介入导管机器人的运动过程规划出一条相对理想的无碰撞路径,实现灵活的主动导向及避障功能。
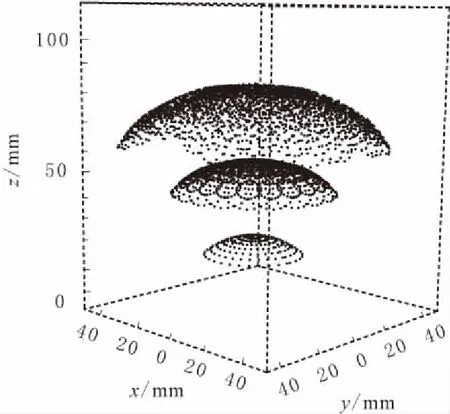
图4 导管关节末端工作空间
3.2 主动导管运动仿真
基于上述介入导管机器人的运动学模型,为验证数学模型的准确性,以Mathematica为平台编程,对主动导管运动轨迹进行规划。设定轨迹规划任务:导管导向机器人末端关节角θ6在0~π/6变化,其他关节角变量保持初始值,通过正向运动学方程式(8),可以得到介入导管机器人在初始平面的弯曲运动轨迹,如图5点划线所示。然后,在获得的运动轨迹中离散出15个位置点,使用上述反向运动学求解方法求出对应离散点的运动学逆解,将得到结果再次代入运动学方程,就可以再次得到对应离散点的位置,如图5中离散点所示。
根据图5所示,离散点与实线基本吻合,表明上述通过旋量和指数积法建立的主动介入导管机器人的运动学模型是正确的。
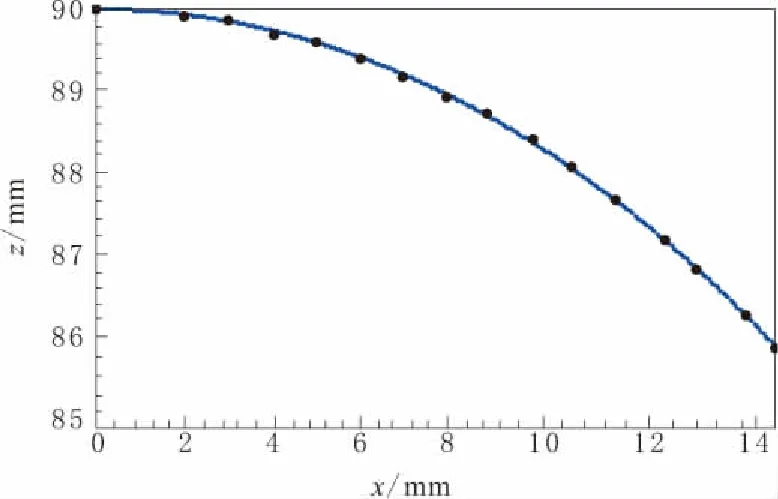
图5 机器人末端运动轨迹
4 结束语
相比传统的机器人D-H建模方法,使用基于旋量理论的指数积建模方法更加适合多关节介入主动导管的运动学建模,可以比较容易地获得关于关节变量的方程。通过得到的运动学逆解对介入导管的运动进行了规划仿真,发现这种建模方法利于机器人运动学的求解,为后续多关节介入导管机器人的设计与控制提供了有效的理论依据。
[1] Gomes P.Surgical robotics:Reviewing the past, analysing the present,imagining the future[J].Robotics and Computer-Integrated Manufacturing,2011,27(2):261-266.
[2] Komatsubara M,Namazu T,Nagasawa H,et al.Development of the forward-looking active micro-catheter actuated by Ti-Ni shape memory alloy springs[A].IEEE 22nd International Conference on Micro Electro Mechanical Systems[C].2009.1055-1058.
[3] Namazu T,Tashiro Y,Inoue S.Ti-Ni shape memory alloy film-actuated microstructures for a MEMS probe card[J].Journal of Micromechanics and Microengineering,2007,17(1):154-155.
[4] Jayender J,Patel R V.Master-slave control of an active catheter instrumented with shape memory alloy actuators[A].IEEE International Conference on Intelligent Robots and Systems[C].2007.759-764.
[5] Jayender J,Azizian M,Patel R V.Autonomous image-guided robot-assisted active catheter insertion[J].IEEE Transactions on Robotics,2008,24(4):858-871.
[6] Jayender J,Patel R V,Nikumb S.Robot-assisted ac-tive catheter insertion: algorithms and experiments[J].The International Journal of Robotics Research,2009,28(9):1101-1117.
[7] Camino W W.Active tip control for small diameter catheters:Power transmission and transduction requirements[D].Salt Lake City:The University of Utah,1992.
[8] Webster R J,Jones B A.Design and kinematic modeling of constant curvature continuum robots:A review[J].The International Journal of Robotics Research,2010,29(13):1661-1683.
[9] Sears P,Dupont P.A steerable needle technology using curved concentric tubes[A].IEEE/RSJ International Conference on Intelligent Robots and Systems[C].2006.2850-2856.
Kinematics Modeling of Intervention Active Catheter Based on Screw Theory
ZHANGJian1,CHENBai1,CHENSun2,GENGLing-bo3,WUHong-tao1
(1.Mechanical and Electrical Engineering,Nanjing University of Aeronautics and Astronautics,Nanjing 210016,China;;2.Xinhua Hospital Affiliated to Shanghai Jiaotong University School of Medicine,Shanghai 200092,China;3.Shenyang Institute of Automation,Shenyang 110016,China)
Considering complex and changeable characteristics of the operating environment for the surgical intervention,the paper proposes a SMA(shape memory alloy) and the cable hybrid-driven modular catheter to improve the versatility of interventional devices.Screw and POE (product of exponentials formula) method were used to establish the kinematics model of a three-joint interventional active catheter.According to the mathematical model,the workspace and motion simulation of the active catheter were analyzed by the use of Mathematica.The simulation results verified the effectiveness and correctness of the kinematics model,and the approach greatly reduced the complexity of kinematics model for multi-section interventional catheter,which makes a theoretical foundation for the practical application of interventional catheter robot.
interventional active catheter;product of exponentials formula;kinematics;motion simulation;workspace
2013-12-11
国家“八六三”科技计划项目(2013AA041004);国家自然科学基金资助项目(51075209);江苏省自然科学基金资助项目(BK2012798);江苏省产学研联合创新资金----前瞻性联合研究资助项目(BY2012011);南京市科委产学研计划资助项目(201204014);上海市科委科技计划资助项目(124119a3900);上海交通大学医工交叉资助项目(YG2011MS08)
TP242.3
A
1001-2257(2014)05-0008-04
张健(1988-),男,山东宁阳人,硕士研究生,研究方向为医疗机器人技术;陈柏(1978-),男,江苏泰州人,教授,博士研究生导师,研究方向为仿生机器人、医疗器械。
猜你喜欢
高师理科学刊(2020年1期)2020-11-26
河北省科学院学报(2020年1期)2020-05-25
佛山科学技术学院学报(自然科学版)(2020年1期)2020-03-12
重型机械(2019年3期)2019-08-27
制造技术与机床(2018年11期)2018-11-23
组合机床与自动化加工技术(2017年5期)2017-05-25
光学精密工程(2016年5期)2016-11-07
光学精密工程(2016年4期)2016-11-07
湖北工业大学学报(2016年5期)2016-02-27
海军航空大学学报(2015年1期)2015-11-11
