
基于局部特征的图像模式识别算法研究*
2014-09-13 06:03崔星华
吉林建筑大学学报 2014年6期
崔 星 华
(吉林建筑大学计算机科学与工程学院,长春 130118)
作为计算机视觉与模式识别的交叉领域,图像模式识别的目标可理解为[1]:发觉目标之间的重要差异.针对在图像的模式识别算法中存在的基于全局特征和基于局部特征算法,本文仅探讨基于局部特征的SIFT/SURF算法.目前,认为基于局部特征的识别与匹配算法有以下3个主要步骤:① 在不同的局部区域使用探测器提取特征点;② 对特征点附近一定范围内的区域提取其特征并构造特征向量,进而形成描述器;③ 通过匹配不同图像中的描述器,进而对特征点进行匹配,达到识别的目的.
1 SIFT算法描述及存在的问题
尺度不变特征变换(SIFT)是在局部特征匹配领域中应用效果较好的算法之一[2],被人们不断深入地研究和改进,总结出了改进算法.Lowe于2004年提出、目前普遍认为是标准的、且较为成熟的SIFT算法[3].
(1) SIFT的检测方案. SIFT检测器是说明特征点的位置的,这里选用尺度不变算法来证明特征点的尺度不变性.则有:
L(x,y,δ)=G(x,y,kδ)*I(x,y)
(1)
由上式得L(x,y,δ):
这里L(x,y)为输入;*为卷积运算;δ为尺度变量.
为了保证极值,人们构造如下函数:
D(x,y,δ)=G(x,y,kδ)-G(x,y,δ)
(2)
可证明,DoG与LoG之间的换算关系:
由上述定义,探测过程是DoG与L(x,y)的卷积操运算,达到生成DoG的过程,即:
DI(x,y,δ)=D(x,y,δ)*I(x,y)=[G(x,y,kδ)-G(x,y,δ)]*I(x,y)
(3)
(2) SIFT方案. SIFT算法主要用来描述特征点的变化,这里选用直方图法进行单位化,保证抗旋转和照度变换的能力.则有:
(4)

(5)
其中,m(x,y)为梯度;θ(x,y)为方向.
SIFT算法具有尺度不变、抗旋转等特性,但是在应用过程中发现存在如下问题:① 当图像分辨率较高时,计算速度将显著下降;② 当特征向量维数较高时,匹配速度明显下降.
因此,在处理大量信息的时候,特别是图库内动态查找、图像视觉导航等应用场合中,SIFT计算速度慢的缺陷就尤为明显.
2 SURF算法描述
SURF算法是对SIFT运算存在的问题进行了改进,并获得显著成功,已在实践中得到验证[4].
(1) SUFR的检测器方案. 不同于SIFT,SURF的检测器基Hessian矩阵.Hessian矩阵由下式定义:
(6)
在实际应用中,对高斯函数进行离散化.
box-filter滤波器系数被Hessian矩阵的F范数所约束,其表达式为:
可得出:det(H)=DxxDyy-(0.9Dxy)2
(7)
由上式,滤波响应按其模型的大小进行规范,使F范数在任意的滤波器上都是常数.
(2) SURF的描述方案. 与SIFT不同的是SURF用Haar小波来计算兴趣点周围的水平和垂直方向的梯度相应,小波尺度与box-filter所逼近的一致.这里SURF描述的检测范围是4*4的子区域,所以描述器是一个64维的特征向量.在保证旋转性不变、抗剪切和抗照度的条件下,对SURF做单位化处理.此时,同样具备旋转不变特征,SURF的描述器维度比SIFT少了一半,因此匹配速度会明显加快.
3 算法比较实验
本文采用两组图片进行对比实验,硬件平台为联想Y450-TSI,软件平台为MATLAB7.8a分别选取了标准和模糊的两组图片进行试验,旨在比较不同环境下两种算法的效果.
(1) 标准图片. 如图1,左侧是原始图片,右侧是旋转90°且加入δ=0.02干扰的图片;
(2) 实拍图组. 如图2,图片是实拍的教室场景,左右分别为水平和垂直拍摄,并加入模糊干扰;

图1 标准图组

图2 实拍图组
(3) 数据统计. 实验对比数据见表1.
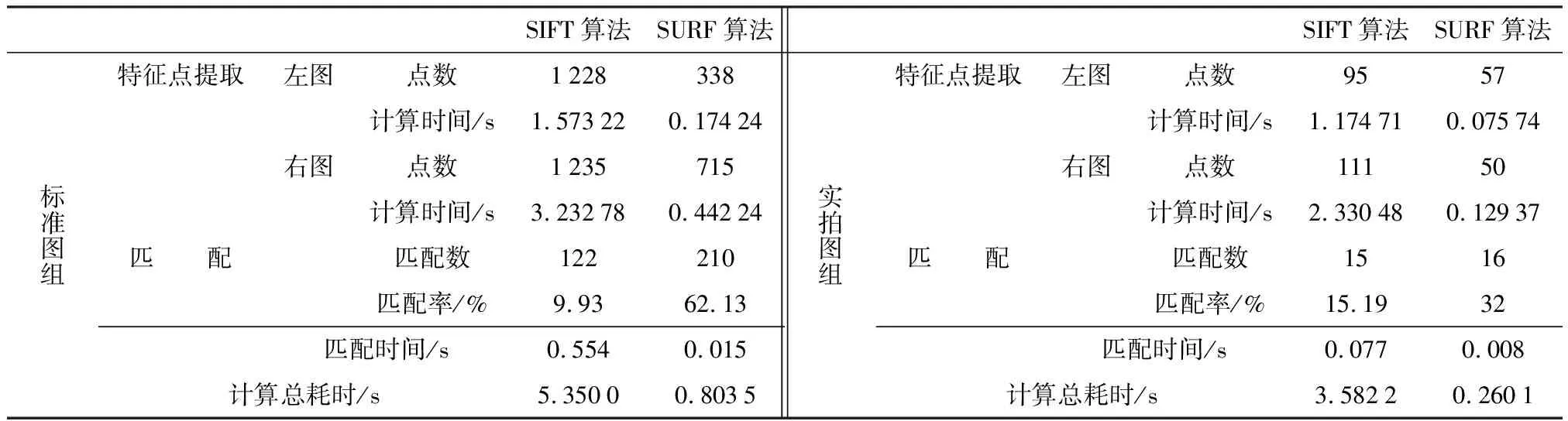
表1 实验数据统计对比
4 实验结果分析
(1) 特征点提取
a.无论是标准图还是测试图,SIFT所提取的特征点数都大大多于SURF;
b.这两种算法在较标准图片提取的特征点数远多于加入模糊干扰的图片提取的特征点数;
c.在加入少量性噪声时,两种算法的鲁棒性较强.SIFT的检测则有更好的抗噪性;
d.提取速度,SURF是SIFT的8~17倍,在进行实时和批量数据处理时,有较强的应用价值.
(2) 匹配性
a.标准图片.在匹配数和匹配率上,SURF都比SIFT高,因为SURF提取的特征点的鲁棒性强,且这类特征点具有的较高复现率.SURF是通过提取鲁棒性强的点来抑制鲁棒性弱的点达到加速;
b.实拍图片.由于加入运动模糊,使两种算法的匹配数和匹配率都大大降低,其中SURF在匹配率这一项上下降明显而SIFT反倒略有上升.一方面说明运动模糊使得具有强鲁棒性的特征点大大减少;另一方面说明SURF虽然提升了运算速度、降低了算法复杂度但是并未改善算法稳定性;
c.匹配时间上看,SURF比SIFT快10~30倍.
(3) 总耗时
SURF的运算速度比SIFT快得多,是SIFT的7倍以上,说明SURF对实时性处理和批量图片搜素具有实用价值.
参 考 文 献
[1] Forsyth David.Computer Vision:A modern approach[M].Prentice Hall,2002:3-18.
[2] Lowe David.Object:Recognition from Local Scale-Invariant[C].ICCV,1999.
[3] Lowe David.Distictive image feature form scale-invariant keypoints[C].IJCV,2004.
[4] Mehrotra H, Majhi B,Gupta P.Annular Iris Recognition Using SURF[C].ICPR,2009.
猜你喜欢
九江职业技术学院学报(2022年1期)2022-12-02
保定学院学报(2022年2期)2022-04-07
农业机械学报(2020年2期)2020-03-09
中华建设(2019年7期)2019-08-27
许昌学院学报(2018年4期)2018-05-02
中华建设(2017年1期)2017-06-07
电子测试(2017年23期)2017-04-04
智能系统学报(2017年5期)2017-01-22
项目管理技术(2016年12期)2016-06-15
西南交通大学学报(2016年6期)2016-05-04
