一种基于证据理论的稳健设计方法
2014-12-23 06:44胡钧铭杨燕红魏发远葛任伟
机械工程师 2014年3期
胡钧铭, 杨燕红, 魏发远, 葛任伟
(1.西华大学交通与汽车学院,成都610039;2.中国工程物理研究院总体工程研究所,四川绵阳621900)
0 引言
工程实际中存在大量与材料理化特性、结构形状参数、边界条件和载荷等相关的不确定性,认识、量化和评估各种不确定性对于产品设计及综合性能保证具有重要作用。不确定性是客观事物联系与发展过程中或然的、无序的、模糊的、近似的属性。按照来源的不同可分为随机不确定性与认知不确定性。随机不确定性取决于变量的内在变异性,是客观存在的,不能通过进一步的认知研究予以消除;认知不确定性主要由认识局限和知识缺乏所造成,随着信息的增加可以予以降低[1]。
作为较早关注不确定性因素对产品性能影响的设计方法,稳健设计方法通过控制设计变量使产品对不确定性因素不敏感[2]。但是传统稳健设计方法大多简单地采用概率量化不确定性,这种简单地认为所有不确定性均可采用概率理论进行量化,忽略了设计中存在的大量认知不确定性。1967 年,Dempster[3]提出了证据理论,随后 G.Shafer[4]对其进一步研究和发展。研究表明,证据理论是对经典概率理论的一种扩展,能对随机、模糊、区间等不确定性信息进行有效处理。近年来,证据理论已成为工程分析与优化方面的研究热点[5-9]。本文提出一种基于证据理论的稳健设计方法,通过概率结构的证据化,建立起随机与认知不确定性的统一分析框架,并基于根据响应证据结构所定义的均值与变差构建了稳健设计准则,实例研究演示和验证了该方法的有效性。
1 证据理论基本原理
证据理论是建立在辨识框架上的不确定推理和决策理论,其理论基础包括基本概率分配函数、信任函数、似然函数等以及Dempster证据合成规则等。
1.1 基本概率分配函数
设Θ是一个辨识框架,基本概率分配函数m是一个从集合2Θ到[0,1]的映射,A表示辨识框架Θ的任一子集,记作A⊆Θ,且满足:
则将m(A)称为事件A的基本概率分配值,它表示证据对事件A的信任程度。基本概率分配函数可根据已有数据或经验构造。
1.2 信任函数与似然函数
信任函数Bel和似然函数Pl都是一个从集合2Θ到[0,1]的映射,若B表示辨识框架Θ的任一子集,则:

Bel(B)表示对B为真的信任程度,Pl(B)表示对B为非假的信任程度,且Pl(B)≥Bel(B),称Bel(B)和Pl(B)分别为对B信任度的下限和上限,记为[Bel(B),Pl(B)],它表示了对事件B的不确定区间。
1.3 Dempster合成规则
Dempster合成规则可以综合不同专家或数据源的知识或数据,合并成一个概率分配函数,其定义如下:
对于∀A⊆Θ,Θ 上的两个质量函数m1、m2的Dempster合成规则为:

其中,K为归一化系数:

式中K称为归一化因子,它反应了不同证据之间的冲突程度,K越小,则说明证据的冲突程度越大。Dempster合成规则在合成冲突证据时,会得出违反直觉的结论,对证据合成规则的改进见文献[10]。
2 基于证据理论的稳健优化分析
稳健优化设计本质上是一个以不确定性量化为基础的寻优过程,产品性能指标及其不确定性是寻优的依据。不确定性量化的结果(性能指标及其不确定性)与实际问题很好吻合,才能确保最终的优化结果具有实用价值。稳健优化设计中的不确定性分析主要包括:参数不确定性量化、不确定性传播、稳健准则构建等。
有时候人们对医院社会服务的认识存在误解:认为它完全是为穷人服务的,主旨就是施财给钱。其实这并非是医院社会服务宗旨,尽管在许多病例中,确实伴随着贫困问题。
2.1 参数不确定性量化
参数不确定性量化,主要包括参数不确定性类型辨识和参数的不确定性表征。
2.1.1 不确定性类型辨识
参数的不确定性类型辨识是从认知的角度,依据所掌握的资料,确认参数的不确定性类型。对于给定的物理模型,系统响应则可被视为认知不确定性参数与随机不确定性参数的函数,如式(5),其中y为系统响应,E为认知不确定性参数,A为随机不确定性参数。

2.1.2 认知不确定性表征
证据理论能直观表达专家的意见,利用系列带有基本概率分配值的区间实现对认知不确定性参数的量化。专家基于各自的实际经验,对认知不确定性参数进行估计,其形式为m(j)},j∈(1,2,…,M),其中 M 为区间总数,m(j)为第j个区间[,]的基本概率分配值。为了获取较为准确的参数信息,可征求并利用合成规则整合不同专家的意见。
2.1.3 随机不确定性表征
对于已知分布的随机不确定性参数A,以A~N(μ,σ2)为例,将其近似截断成[μ-ξσ,μ+ξσ],然后离散截断区间成N个子区间[,],i∈(1,2,…,N),对于每一子区间,其基本概率分配值定义为

其中,f(x)是参数A的概率密度函数。显然,随机不确定参数子区间的基本概率分配值就是概率密度函数在指定区间的面积。
2.2 不确定性传播

C表示所有参数的笛卡尔积,Cij是C的子集。当A和E相互独立时,联合基本概率分配值m(Cij)为:

系统响应的不确定性是在参数联合概率分配结构下,通过式(5)计算获得响应的基本概率分配。即对于每一个Cij,计算响应的最小和最大值

且m([ymin,ymax])=m(Cij)。显然,联合证据结构Cij的个数以及在其上响应极值的计算是决定证据理论分析计算时间的2个主要因素。
2.3 稳健设计准则
传统基于概率论的稳健设计准则是在系统响应均值和方差的基础上,通过在最小化响应波动的同时,尽可能减小均值与设计目标间的距离来实现的[11]。类比于概率论的均值和方差,提出了区间证据结构的均值和变差,以此作为评价响应稳健性的指标。
2 .3.1 区间证据结构的均值和变差
基于证据理论的不确定性传播,获得的系统响应是区间证据结构。为表征响应的集中和分散程度,定义区间证据结构的均值与变差。
2.3.2 稳健寻优流程
稳健设计根据产品性能需求的不同将设计分为望大、望小和望目三种[11]。基于响应区间证据结构均值与变差,分别构建了三类稳健设计准则。
望大/望小:max/min Ey+βDy,
望目:min (Ey-y0)2+β(Dy)2。
其中β为权值系数,在望大特性中可取为负值,即采用极大化最小值原则;在望小特性设计中可取为正值,即采用极小化最大值原则;在望目特性中,y0为设计目标值,综合采用极小化均值与目标值间距离以及变差的原则。
3 实例研究
在导弹、卫星等航天器中,支撑结构及安装在其上的功能组件(安装板+隔振器+功能组件)构成一类广泛采用的典型结构系统。该类结构的动态响应是表征其环境适应能力的重要指标,历来受到高度重视。但在计算机仿真分析中由于模型简化不可避免地引入认知不确定性,导致仿真结果与实际严重不符,进而影响设计决策。
本节以该类系统动态响应(系统加速度传递函数的第一个峰值)为设计目标,演示和验证所提出的方法。为提高证据分析计算效率,通过建立响应与设计参变量间的近似模型替代有限元模型,结合优化算法求解联合证据结构上的极值,并运用遗传算法开展寻优。
3.1 响应面原理
响应面法结合试验设计技术与统计学原理,在优化区域内建立响应与影响因素间的关系。一个系统的响应y依赖于 p个输入因子 x1,x2,…,xp,如果考虑响应与影响因素间的线性关系,并考虑因素的交互效应和二次效应,二阶响应面模型可表达为:

3.2 试验设计与回归
通过筛选确定了影响系统响应的因素:安装板的厚度、安装板的弹性模量、阻尼垫的高度、阻尼垫的半径以及等效弹性模量(阻尼垫及连接结构有限元模型的等效弹性模量)。结构ANSYS有限元模型如图1,安装板采用单元Shell63,隔振器及连接结构采用单元Beam4,功能组件采用单元Solid45。选用5因素(1/2分式)正交旋转组合设计,编码水平如表1。
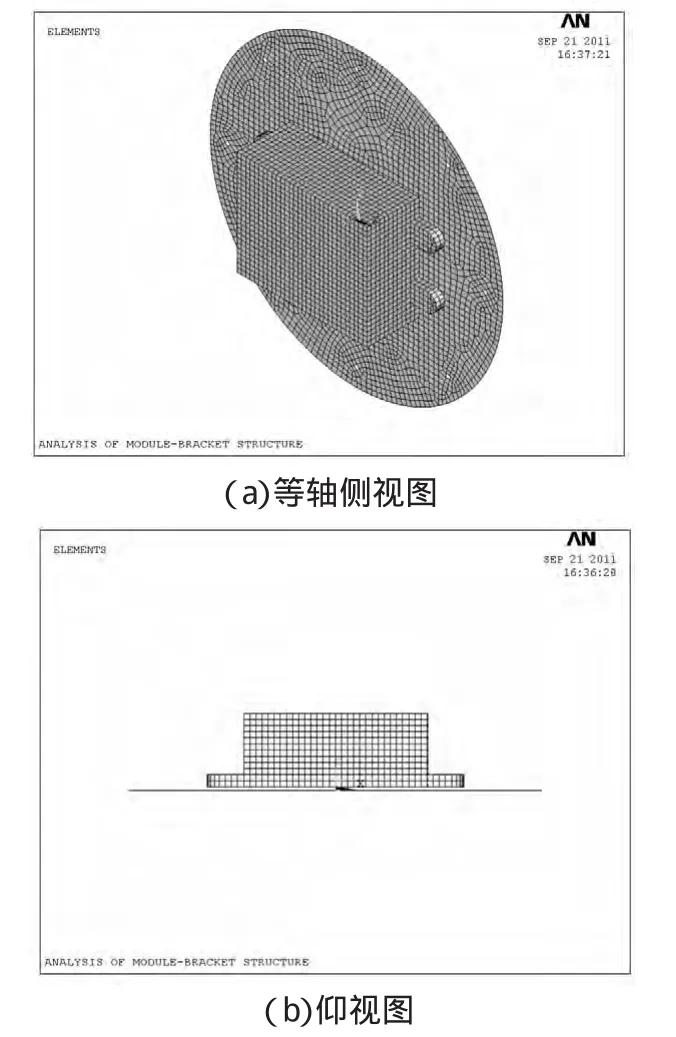
图1 结构有限元模型
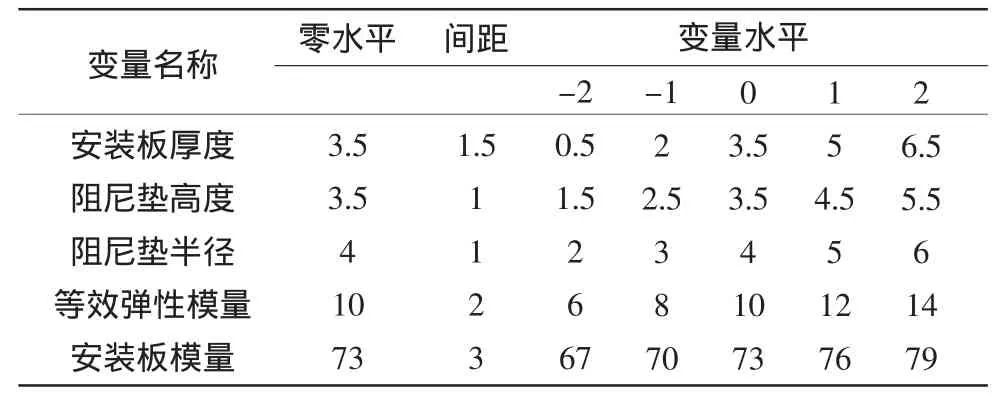
表1 变量水平信息表
对试验数据表2进行拟合,并经回归模型和回归系数的显著性检验,得到系统响应的回归模型:

其中,x1、x2、x3、x4、x5分别代表安装板的厚度、阻尼垫的高度、阻尼垫的半径、等效弹性模量和安装板的弹性模量,y为系统加速度传函第一个峰值的对数值。
3.3 稳健优化
为使系统具有较强的环境适应能力和稳健性,因此系统加速度传递函数第一个峰值应尽可能小。优化目标采用望小特性,权值系数β取为1,综合设计变量 x1、x2、x3的约束条件,优化模型如式(14)。由于认知不确定性参数造成目标函数不连续,不能直接使用梯度优化算法,而遗传算法具有离散化、全局性、自适应等特点,结合遗传算法的稳健优化计算流程如图2所示。

考虑到实际加工过程的影响,假定设计变量x1、x2、x3均服从方差已知,均值未知的正态分布x1~N(μ1,0.01),x2~N(μ2,0.01),x3~N(μ3,0.01);安装板弹性模量 x5服从 N(73,1)的正态分布;专家1和专家2基于自身经验给出的认知不确定性参数——等效弹性模量的信息及根据Dempster合成规则得到的整合信息见表3。

表2 试验数据
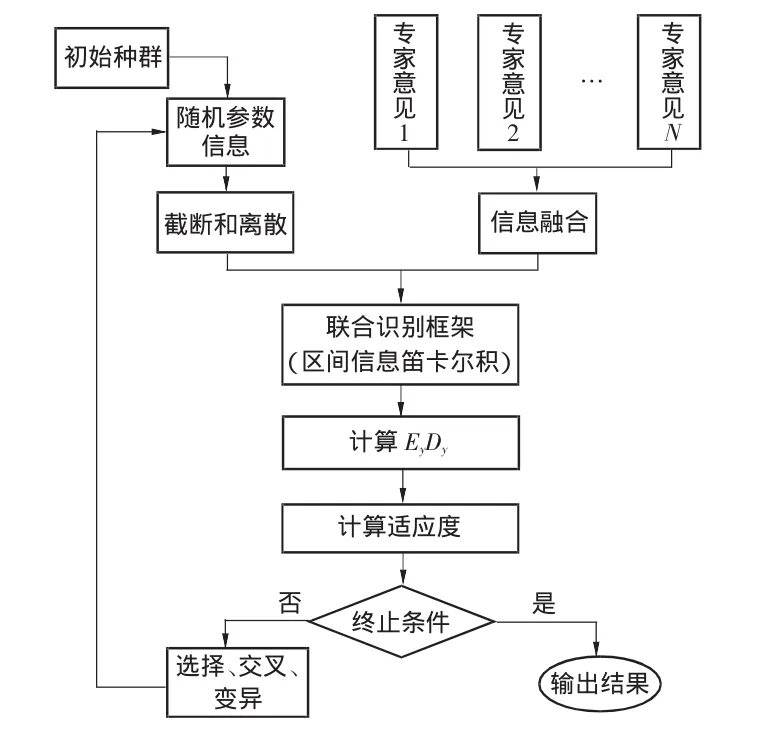
图2 稳健优化计算流程
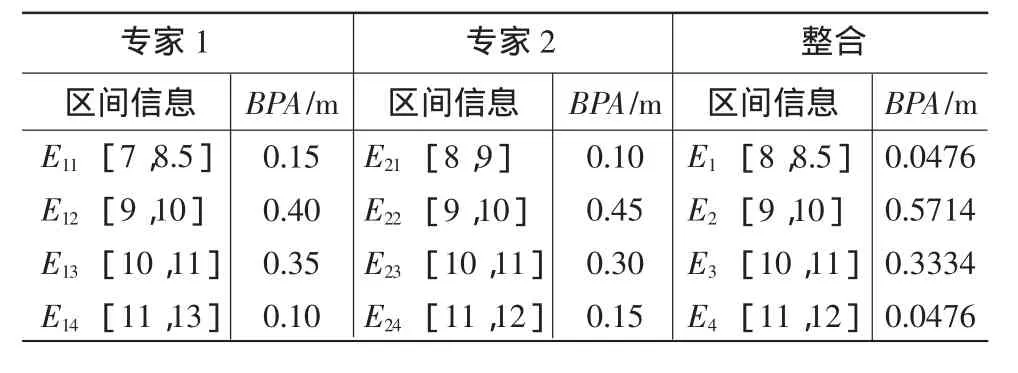
表3 等效弹性模量
采用MatlabR2009a优化工具箱(OptimizationToolbox)中的遗传算法(genetic algorithm,GA)和fmincon函数,编制计算程序,得到计算结果x1=5,x2=3.25,x3=3。
4 结语
基于证据理论建立了认知与随机不确定性统一分析框架,构建的稳健设计方法是一种广义建模方法,为研究多类多源不确定性下的稳健设计问题提供了新思路。当设计模型中的不确定性变量和参数具有模糊性及其他未确知性时,通过转化与融合,有望为稳健设计问题的研究提供新途径、新方法。该方法比现有的稳健设计方法具有更强的处理不确定因素的能力,具有良好的工程应用前景。
[1] Oberkampf W L,Helton J C,Joslyn C A,et al.Challenge problems:uncertainty in system response given uncertain parameters[J].Reliability Engineering and System Safety,2004,85(2):11-19.
[2] GeorgH,SendhoffB.Robustoptimization-Acomprehensivesurvey[J].Computer methods in applied mechanics and engineering,2007,196(33):3190-3218.
[3] Dempster A P.Upper and lower probabilities induced by a multivalued mapping [J].Annals of Mathematical Statistics,1967,38(2):325-339.
[4] Shafer G.A Mathematical Theory of Evidence[M].Princeton,New Jersey:Princeton University Press,1976.
[5] Bae H R,Grandhi R V,Canfield R A.Epistemic uncertainty quantification techniques including evidence theory for largescale structures [J].Computers&Structures,2004,82(13):1101-1112.
[6] Bae H R,Grandhi R V,Canfield R A.An approximation approach for uncertainty qualification using evidence theory[J].Reliability Engineering&System Safety,2004,86(3):215-225.
[7] Agarwal H,Renaud J E,Preston E L,et al.Uncertainty quantification using evidence theory in multidisciplinary design optimization[J].Reliability Engineering&System Safety,2004,85(1):281-294.
[8] Mourelatos Z P,Zhou Jun.A Design Optimization Method Using Evidence Theory[J].Journal of Mechanical Design,2006,128(4):901-908.
[9] 郭惠昕,刘德顺,胡冠昱,等.证据理论和区间分析相结合的可靠性优化设计方法[J].机械工程学报,2008,44(12):35-41.
[10] Sentz K,Ferson S.Combination of Evidence in Dempster-Shafer Theory[R]//SAND2002-0835 Report,Albuquerque,New Mexico:Sandia National Laboratories,April2002.
[11] 陈立周.稳健设计[M].北京:机械工业出版社,1999.
[12] 杨德.试验设计与分析[M].北京:中国农业出版社,2002.
猜你喜欢
中学生数理化·八年级物理人教版(2022年9期)2022-10-24
法律方法(2022年2期)2022-10-20
中国外汇(2019年13期)2019-10-10
中国外汇(2019年7期)2019-07-13
系统工程与电子技术(2016年4期)2016-08-24
中学生数理化(高中版.高二数学)(2016年4期)2016-03-01
北京信息科技大学学报(自然科学版)(2016年6期)2016-02-27
浙江理工大学学报(自然科学版)(2015年5期)2015-03-01
数学年刊A辑(中文版)(2014年4期)2014-10-30
郑州大学学报(理学版)(2014年4期)2014-03-01