一种汽车燃油泵用无刷直流电动机换相信号检测方法
2015-01-13 10:17薛晓明
微特电机 2015年4期
薛晓明,陈 宏
(1.常州信息技术学院,常州213164;2.江苏财经技术学院,淮阴223003)
0 引 言
无刷直流电动机因结构简单、运行效率高、维护方便、调速性能好等优点在汽车领域,特别是汽车燃油泵应用方面受到越来越多的关注。为了减少无刷直流电动机的转矩脉动,必须获取电机的换相信号控制逆变器使绕组电流与反电动势相位一致,传统获取换相信号的方法是在转子上安装三个霍尔传感器来实现,但霍尔传感器增大了电机体积和成本,同时不能适应汽车燃油泵内高温、高湿等恶劣的工作环境,且传感器连线较多,易受外界信号干扰,降低了电机运行的可靠性。为了解决上述缺陷,许多无位置传感器检测算法成为研究的热点[1-4]。
研究最为广泛的是通过检测端电压与虚拟中性点电压进行比较得到反电动势的过零点,经移相30°或90°电角度后获得换相信号[5-9]。由于电机端电压中含有PWM 斩波和换相续流干扰,需要阻容电路进行深度滤波,结果导致测量的反电动势过零点与实际反电动势过零点存在相移,而相移又随着电机的速度和负载的变化而变化,为了补偿这种相移,需要应用软件实时计算相角的延迟,算法较为复杂。文献[10]、[11]提出了一种通过在PWM 不导通期间,将悬浮相的端电压与1/2 直流母线电压进行比较获得换相信号,提出的方法不存在相移,但需补偿逆变器开关管压降,且只能在PWM 的关断时间内进行检测,占空比无法全覆盖。文献[12]通过检测反电动势的三次谐波过零点获得换相信号,取消了滤波电路,但需引出电机中性点。文献[13]通过引入积分电路来检测换相信号,提升了电机的低速性能,但存在积分误差。文献[14]通过检测开关管并联二极管的续流时间来间接测量反电动势过零点,无需构建虚拟中性点,但需六路隔离电源供电。文献[15]提出了一种没有相位延迟直接获得换相信号的线间端电压检测法,电路十分简单,但需复杂的高速芯片进行实时计算。
针对上述问题,本文提出一种利用低通滤波器滤除端电压高频噪声,经隔直后送到迟滞比较器和过零比较器获得换相信号的简易检测算法。采用的迟滞比较器可以补偿低通滤波器产生的相移,同时可防止端电压中出现的高频干扰带来的多次翻转现象。此方法具有结构简单、成本低廉,无需移相30°或90°,无需构建虚拟中性点,无需利用软件进行相移补偿,在汽车燃用泵用无刷直流电动机驱动系统要求的3 000 ~9 000 r/min 宽调速范围内,任何负载下都能准确地辨识换相信号,应用MCU 构建的平台验证了此方法的可行性。
1 转子位置检测原理
汽车燃油泵用无刷直流电动机参数如表1 所示。

表1 汽车燃油泵用无刷直流电动机参数
提出的汽车燃油泵用无刷直流电动机换相信号检测方法的原理方框图如图1 所示,由一阶低通隔直滤波电路、迟滞比较电路和过零比较电路三部分组成。图1 中ua,ub,uc分别为无刷直流电动机的a,b,c 三相端电压;uaf,ubf,ucf为滤除了端电压高频PWM 以及直流偏移量的信号;Voa,Vob,Voc为迟滞比较器输出信号;Vc为迟滞比较器电源;Ha,Hb,Hc为换相信号。

图1 提出的换相信号检测原理图
1.1 一阶低通隔直滤波器的工作原理
为了滤除无刷直流电机端电压中高频PWM 信号以及直流偏移量并保持波形的形状不发生变化,一般采用一阶低通隔直滤波器,滤波前后的端电压波形如图2 所示。图2 中ta1,ta2为最佳换相时刻。

图2 滤波前后端电压的波形
滤波前后最佳换相时刻的相移角θ 与截止频率fc和电机转速n 的关系如下:
式中:p 为电机的极对数。
根据式(1),应用MATLAB 7.2 绘制截止频率fc,相移角θ 随不同电机转速n 变化曲线如图3 所示。
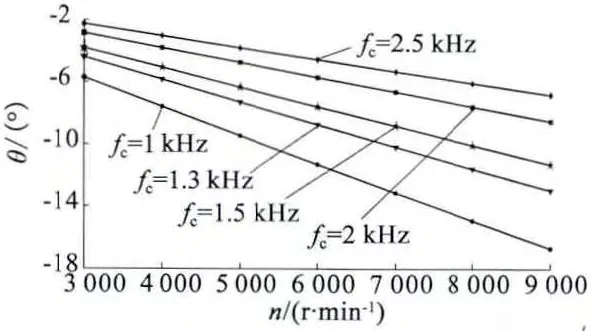
图3 不同截止频率,相移角θ 随电机转速的变化曲线
从图3 中可以看出,随着转速的增加,滞后相移的角度增大,这将导致电流和反电动势相位不一致,从而使得电机的运转振荡并产生较大的铜耗。
1.2 迟滞比较器的工作原理
由图1,滤波后的a 相端电压uaf加到比较器的反向输入端,滤波后的c 相端电压ucf经过电阻R1送到比较器的同相输入端,根据叠加原理[16],比较器的差分电压Vda可表示:

式中:k=R2/R1为比较器增益。




图4 迟滞比较器的工作原理
从图4 中可以看出,迟滞比较器产生A 点的时刻t1比滤波后的a 相端电压uaf到达幅值的时刻t2超前,设超前时间为ta。
在0 ~30°电角度内,VTL随时间的变化函数可表示为:

式中:Ts是端电压的周期;Vp是端电压经过滤波隔直后的幅值。因为在任何时刻无刷直流电动机只有两相导通,因此VP与反电动势的幅值相等[17],即:

式中:Ke为反电动势系数;n 为电机转速。
应用式(4),可求得VTL(t)等于ucf的时刻t1:

ta等于Ts/12 与t1的时间间隔,即:

把式(5)、式(6)代入到式(7),可推导出超前角θa:

式中:ω=2πf 为电机电角速度;f 为端电压的频率。
从式(8)可以看出,超前角θa由比较器增益k,比较器电源电压VC和电机速度n 共同决定。为了实现补偿的作用,超前角θa必须大于零,从式(8)可以得到:

式中:nmin为电机调速范围的最低值。
同理,可推导出B 点的时刻比滤波后的a 相端电压uaf的到达幅值的时刻也超前θa。
根据表1 的汽车燃油泵用无刷直流电动机的参数,应用式(9)可推导出比较器电源电压的最大值为1.8 V,考虑比较器的电源电压使用范围,实际取1.2 V。
根据式(8)绘制的不同比较器增益k,超前角θa随电机速度n 变化曲线,如图5 所示。

图5 不同比较器增益,超前角随电机转速变化曲线
从图5 中可以看出,在同一转速时,超前角θa随比较器增益加大而变小,而在同一比较器增益k时,超前角θa随电机速度的增加而加大。因此,在整个速度范围内,一阶低通隔直滤波器引起的滞后相移可以通过比较器的增益k 来补偿。
1.3 相移补偿的参数设计规则
车用燃油泵用无刷直流电动机的额定转速工作在6 000 r/min,为了实现额定转速时换相信号的上升沿和下降沿为最佳换相时刻,只要使迟滞比较器产生的超前相移等于低通滤波器引起的滞后相移,即:

将式(1)和式(8)代入式(10),可得到低通滤波器截止频率fc与迟滞比较器的增益k 的关系为:

根据式(11)绘制的曲线如图6 所示。

图6 低通滤波器截止频率fc 与迟滞比较器的增益k 的关系
根据式(2)、式(3)可知,迟滞比较器的门限宽度VBW为VC/k,在VC取1.2 V 时,绘制的门限宽度随增益k 变化曲线如图7 所示。从图7 中可以看出,随着K 的增大,门限宽度VBW逐渐减小,迟滞比较器抵抗端电压高频脉动电压的干扰能力降低。

图7 迟滞比较器的门限宽度VBW随增益k 的变化曲线
为了保证迟滞比较器有较强的抗干扰能力以及在额定转速时换相信号的上升沿和下降沿为最佳换相时刻,综合图5、图6,比较器的增益k 选择1.3 为最佳,此时低通滤波器的截止频率fC为1.3 kHz,迟滞比较器的门限宽度WB为0.92 V。根据选择的参数计算低通滤波器滞后相移、迟滞比较器超前相移以及补偿后的相移,如表2 所示,绘制的曲线如图8所示。

表2 不同转速,低通滤波器的滞后相移、迟滞比较器超前相移以及补偿后的相移φ/(°)

图8 滞后角、超前角和补偿后的相移角
从表2 和图8 可以看出,尽管一阶低通滤波器的相移滞后范围为-4.4°到-13°,而补偿后的相移范围为-2.8°到+0.77°。因此,在9 000 r/min 时,最大换相相移从-13°减少为-2.8°。
2 试验结果
为了验证所提出方法的正确性,构建了如图9所示的试验系统。试验控制系统的主控芯片采用瑞萨R8C/11 单片机,参考速度通过RS-232 串口由上位机来设置,试验采用的无刷直流电动机参数如表1 所示。
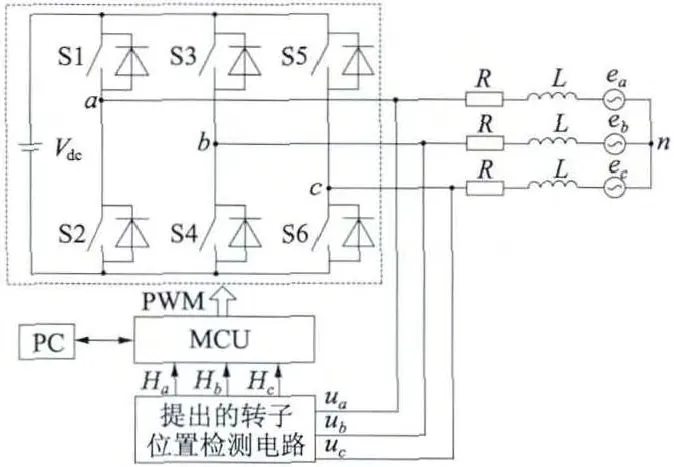
图9 试验系统框图
轻载下,电机速度分别为3 000 r/min、6 000 r/min 和9 000 r/min 时,a 相端电压ua、滤波后的端电压uaf、迟滞比较器输出电压Voa和换相信号Ha的波形如图10 所示。从图10 中可以发现,在电机速度为3 000 r/min 时,Ha的上升沿和下降沿比滤波后端电压uaf到达幅值的时刻提前了4.5°,与最佳换相时刻相同;在电机速度为6 000 r/min 时,Ha的上升沿和下降沿比滤波后的端电压uaf到达幅值的时刻提前了8.8°,与最佳换相时刻相同;而在电机速度为9 000 r/min 时,a 的上升沿和下降沿比滤波后端电压uaf到达幅值的时刻提前了10.2°,比最佳换相时刻滞后2.8°。试验结果与表2 和图8 中的理论分析完全相同。

图10 不同a 相端电压ua,滤波后的端电压uaf,迟滞比较器输出电压Voa和换相信号Ha 的波形
图11 显示了电机速度为6 000 r/min 时,半载和额定负载下未滤波后的端电压ua、滤波后的端电压uaf、功率管S1 的PWM 驱动电压Sa和a 相定子电流的波形。从图11 中可以发现,随着定子电流的增加,滤波后的端电压uaf的相移不断加大,同时续流二极管的导通时间也有所增加,但电流出现的时间总是和最佳换相时刻始终保持一致。
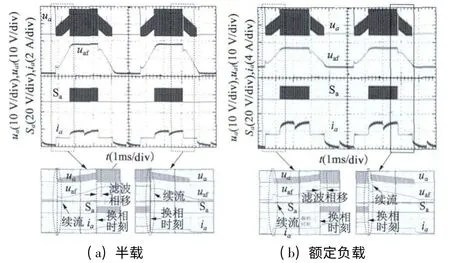
图11 半载和额定负载下未滤波的端电压ua、滤波后的端电压uaf、功率管S1 的PWM 驱动电压Sa 和a 相定子电流的波形
3 结 语
本文围绕汽车燃料油泵用无刷直流电动机提出了一种基于端电压的迟滞比较器无位置传感器控制方法。通过选择迟滞比较器输出电压的电平和比较器增益以及一阶低通滤波器的截止频率,可使额定转速时实现最佳换相,在最大转速时换相滞后角由-13°变为-2.8°。不管端电压的大小,只要端电压脉动电压的幅值在迟滞比较器的门限宽度0.92 V以内,可防止换相信号的多次翻转,避免了端电压中出现的PWM 和续流干扰。
[1] 邹继斌,江善林,张洪亮. 一种新型的无位置传感器无刷直流电机转子位置检测方法[J].电工技术学报,2009,24(4):48-53.
[2] 孙自勇,李广波,侯强,等. 基于DSP 的无刷无位置直流电动机调速系统的研究[J]. 电力系统保护与控制,2009,37(10)106-111.
[3] JUNGD H,HA I J. Low-cost sensorless control of brushless dc motors using a frequency-independent phase shifter[J]. IEEE Transactions on Power Electronics,2000,15(4):744-752
[4] 王鲜芳,杜志勇,王向东.基于LS-SVM 和滑模变结构的无刷直流电动机混合控制[J].电力系统保护与控制,2011,39(2),70-74.
[5] 张磊,瞿文龙,陆海峰,等.一种新颖的无刷直流电机无位置传感器控制系统[J].电工技术学报,2006,21(10):26-30,43.
[6] 曹建波,曹秉刚,王斌,等.电动车用无刷直流电机无位置传感器控制研究[J].西安交通大学学报,2008,42(5):597-601.
[7] 周波,魏佳.反电势逻辑电平积分比较法实现的无刷直流电机无位置传感器控制[J].电工技术学报,2000,15(4):5-9,4.
[8] LAI Yenshin,LIN Yongkai.Novel back-EMF detection technique of brushless DC motor drives for wide range control without using current and position sensors[J].IEEE Transactions on Power Electronics,2008,23(2):934-940.
[9] 支长义,王瑞玲,唐道奎,等.无刷直流电动机模糊自适应PID控制策略研究[J].电力系统保护与控制,2010(8):35-37.
[10] SHAO Jianwen,NALAN D,HOPKINS T.A novel microcontroller-based sensorless brushless DC (BLDC)motor drive for automotive fuel pumps[J].IEEE Transactions on Industry Applications,2003,39(6):1734-1740.
[11] 薛晓明,杨翀. 一种统一的无刷直流电机直接反电动势法[J].电工技术学报,2010,25(9):62-68.
[12] 韦鲲,任军军,张仲超.三次谐波检测无刷直流电机转子位置的研究[J].中国电机工程学报,2004,24(5):163-167.
[13] WU Zhigan,ZHOU Genfu,YING Jianping.High dynamic sensorless BLDCM drive with very wide speed range[C]//2004 IEEE Annual Conference of Industrial Electronics Society,2004,1:981-986.
[14] OGASAWARA S,AKAGI H. An approach to position sensorless drive for brushless DC motors[J].IEEE Trans. on Industry Applications,1991,27(5):928-933.
[15] 李志强,夏长亮,陈 炜.基于线反电动势的无刷直流电机无位置传感器控制[J].电工技术学报,2010,25(7):38-44.
[16] CHUN T-W,TRAN Q-V,LEE H-H. Sensorless sontrol of BLDC motor drive for an automotive fuel pump using a hysteresis comparator[J]. IEEE Transactions on Power Electronics,2014,29(3):1382-1391.
[17] 薛晓明,钱驰波.基于线电压的无刷直流电动机无位置传感器换相方法[J].微特电机,2008,36(7):20-22.
猜你喜欢
微电机(2022年8期)2022-10-12
微特电机(2021年11期)2021-11-16
汽车维护与修理(2020年3期)2020-08-05
郑州大学学报(工学版)(2020年2期)2020-06-16
通信技术(2020年4期)2020-04-25
汽车维护与修理(2019年21期)2019-06-02
汽车电器(2019年2期)2019-03-22
机电信息(2018年6期)2018-03-05
北京航空航天大学学报(2017年5期)2017-11-23
成都大学学报(自然科学版)(2015年3期)2015-08-01