
一种基于线性近似的非线性系统模型预测控制方法*
2015-03-10 10:33盖俊峰赵国荣周大旺
航天控制 2015年5期
盖俊峰 赵国荣 周大旺
海军航空工程学院,烟台264001
模型预测控制(Model Predictive Control,MPC)是近年来崛起的一种成功的控制策略。MPC针对的是有优化需求的控制问题[1],通过对某一性能指标的最优化来确定未来的控制作用[2]。由于现代工业生产过程的控制对象大多具有非线性特征,非线性系统的模型预测控制已成为当前的研究热点。而非线性系统预测控制的关键问题在于如何处理非线性和降低在线计算量[1]。
非线性系统的设计和分析往往比线性系统困难得多,非线性微分方程通常不可能得到封闭形式的解析解,除非经过特殊处理,而傅里叶变换、拉普拉斯变换和叠加原理等适用于线性系统的强有力的数学工具都不再适用于非线性系统的控制问题。因此,对于实际工程操作人员来说,最简单的方法就是把非线性动态特性线性化,然后再用成熟的线性系统设计方法完成对控制系统的分析和综合[3]。
文献[4]用中值定理将非线性系统进行线性化处理,用三次样条函数来逼近线性系统的时变参数,并对样条函数的常值参数进行了辨识;文献[5]针对只含输出非线性环节的系统沿期望的输出轨迹用Taylor级数一阶展开近似线性化,但是该方法不能处理含有输入非线性环节的系统。运用Taylor级数展开法对非线性系统进行线性近似时,要求表征系统模型的输入输出函数必须连续可导,但有些物理系统并不满足这一假设,因此Taylor级数展开法对此不再适用。文献[6]指出,利用Stirling插值公式对非线性函数进行线性化处理的精度要高于Taylor一阶近似,且不需对其进行求导运算,因此对不满足连续可导假设的非线性系统,Stirling插值公式依然适用。
本文受文献[6]的启发,针对一类非线性系统(尤其是系统模型的输入输出函数不满足连续可导条件的非线性系统)设计了一种基于线性近似的MPC方案。首先运用Stirling插值公式对非线性函数进行线性近似处理,并将模型预测控制性能指标重构为一个二次型最优化问题。最后,通过对二次型最优化问题的求解得到了模型预测控制的最优控制序列。为了减少计算量,忽略了线性近似过程中产生的非线性高阶项。仿真结果表明,该方案能达到满意的控制效果,且具有降低控制能量消耗和缩短控制时间的优点。
1 系统模型与问题描述
考虑如下的非线性离散系统:

其中,x(k)∈Rn为状态向量,u(k)∈Rm为控制输入向量,y(k)∈Rp为输出向量。f(·)为一连续的非线性函数,C(k)为一常数矩阵。
实际的工业过程中,受设备条件的限制,对系统的控制量和控制增量都有一定限制,需服从如下的约束条件:
同时,为了避免系统输出超过限制量,给出以下的输出约束:

其中,umin≤umax,Δumin≤Δumax和ymin≤ymax分别为各向量的下界和上界。
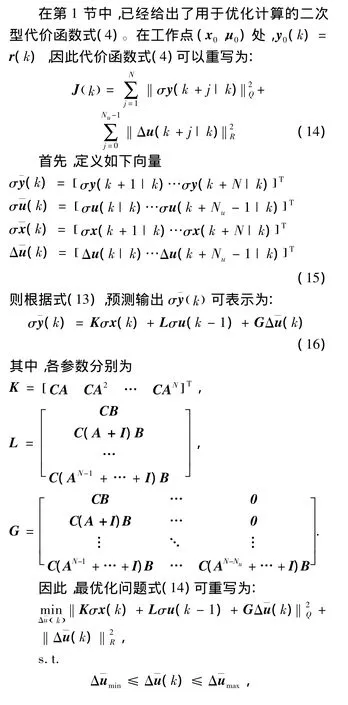
模型预测控制是一种迭代最优化方法:在每个采样时刻k,测量或估计当前状态,然后通过对一个控制代价函数的最优化来获得最优输入向量。对模型(1),给出以下满足有限时域二次型规则的代价函数:
2 系统的线性近似
当非线性系统式(1)中的f(·)为一连续可微的非线性函数时,对于某些不太严重的非本质非线性特性,用Taylor近似方法进行分析和设计,在工作点的某一邻域大体是正确的,产生的误差也往往为工程上所接受。而当f(·)为一不可微的非线性函数时,由于不能对其进行求导运算,Taylor近似方法在此不再适用。区别于Taylor级数展开线性近似方法,用Stirling插值公式对非线性函数进行线性近似时无需进行求导运算,只需用有限线性运算来逼近该非线性函数[7-8]。由于Stirling插值公式能对余项直接进行控制,这使得在某些应用中其比Taylor近似更具吸引力。如果能选取合适的区间长度,可以确保Stirling余项能接近完整Taylor级数的高阶项[9]。鉴于上述优点,本节采用Stirling插值公式法作为线性近似处理的数学工具。
下面用Stirling插值公式对非线性系统(1)进行线性近似。首先定义如下函数:


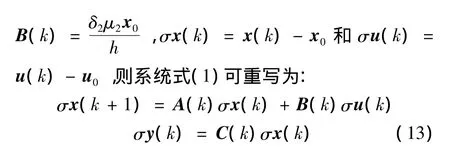
至此,当非线性函数f()·不可微时,非线性系统式(1)可以通过Stirling插值公式法线性近似为如式(13)的形式。这种形式可为构造二次型最优化问题提供方便,将在下节详细说明。
3 二次型最优化问题的重构
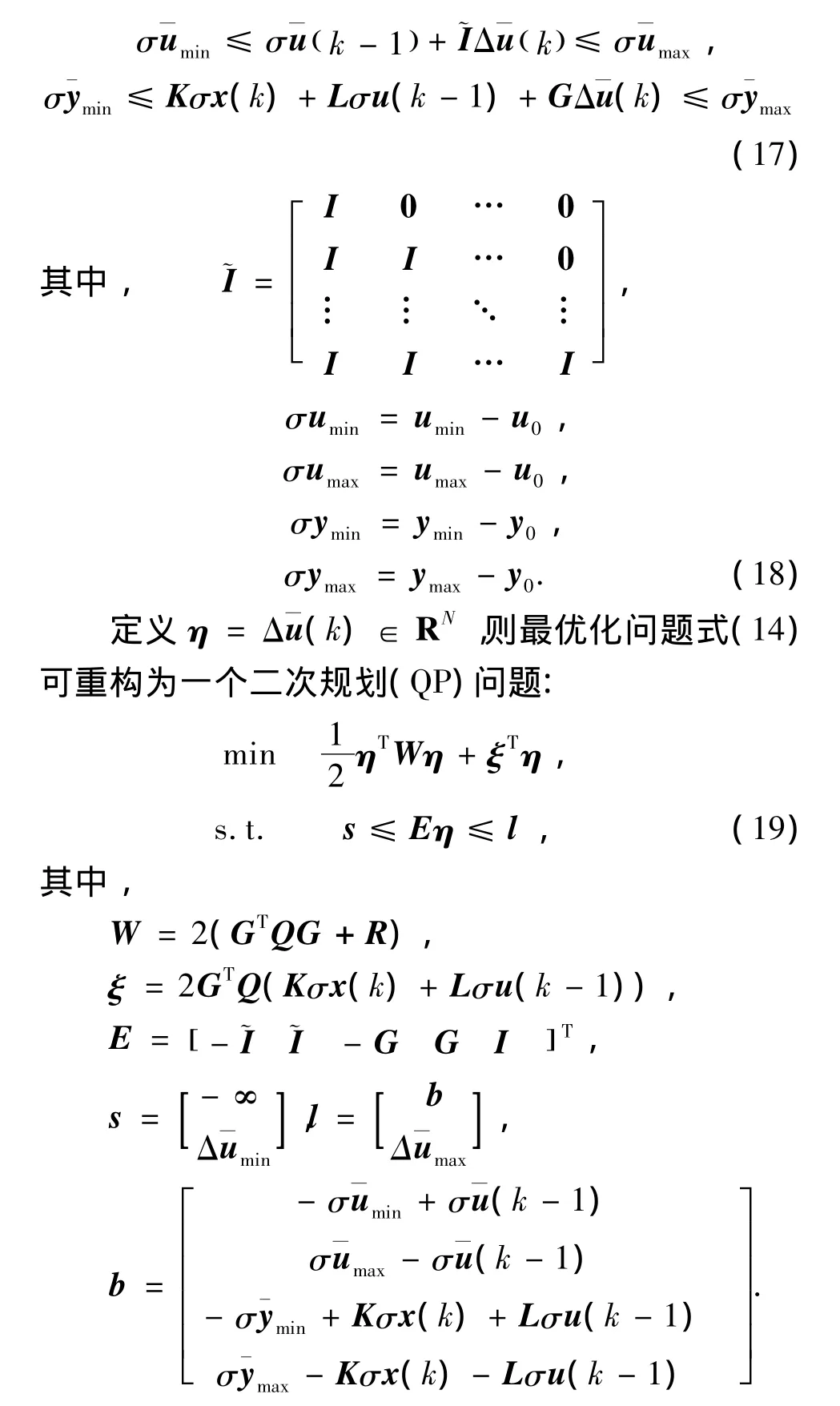
此处,由于Q和R为正定阵,矩阵W也为正定阵,且所有的可行域都为凸的,因此最优化问题式(19)为一个凸二次规划问题。对二次规划问题式(19)求解,得到一个在控制域N上的控制增量向量Δ¯u(k),从而可计算出k时刻的最优控制输入。
4 仿真分析
本节选取某非线性对象系统,其非线性函数f(·)不满足连续可微条件,Taylor级数展开法不再适用于此处,故用Stirling插值公式法对其进行线性近似处理。所选非线性对象系统描述如下:
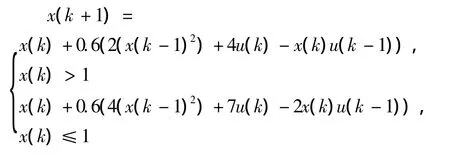
其中,预测域N=10,控制域Nu=3,控制时长为t=100s。权值矩阵Q=2.5I,R=0.5I。输入约束为 -35≤u(k)≤35,控制增量约束为 -40≤Δu(k)≤40,输出约束为-10≤y(k)≤10。本例的参考输出轨迹设置为一个方波信号。
本例对直接基于原非线性模型的情况和基于近似线性模型的情况分别进行了仿真,结果如图1~3所示。图1中,Ref为参考输出轨迹,y1为采用基于原非线性模型的MPC方案时系统的输出轨迹,y2为采用基于本文近似线性模型的MPC方案时系统的输出轨迹;图2为2种不同情况下的控制输入量曲线,其中u1为采用基于原非线性模型的MPC方案时的控制输入,u2为采用基于本文近似线性模型的MPC方案时的控制输入;图3中,e1=y1-Ref,e2=y2-Ref,分别表示了采用2种MPC方案时的系统对参考输出轨迹的跟踪误差。
仿真过程中,分别对2种方法进行100步优化计算所消耗的时间进行统计求均值,可得到2种方法平均每步优化计算所消耗的时间。
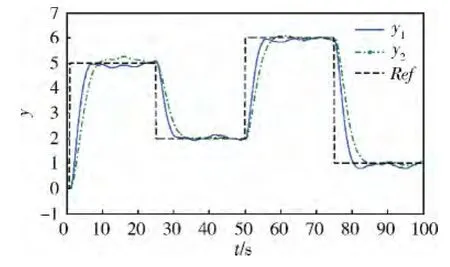
图1 系统输出跟踪曲线
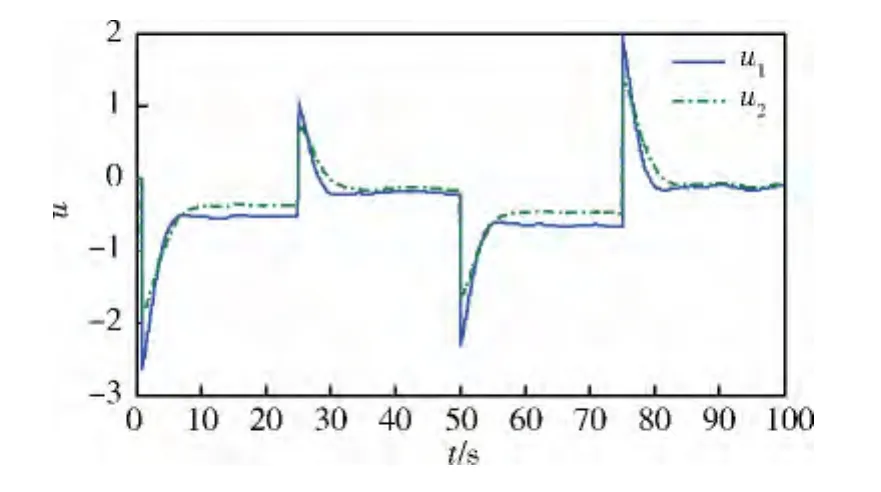
图2 系统控制输入曲线
经计算,直接基于原非线性模型的MPC方案消耗时间为0.04672s;基于本文近似线性模型的MPC方案消耗时间为0.01925s。
由仿真结果可以看出,本文提出的方案跟踪精度要比直接基于原非线性模型MPC方案的跟踪精度略低。其原因是在对非线性模型进行线性近似处理时,忽略了非线性高阶项,这必然引入了线性化截断误差,使系统的跟踪精度降低。但是,与直接基于原非线性模型的MPC方案相比,基于线性近似模型的MPC方案能减少控制能量的消耗,且大大节省了跟踪时间。
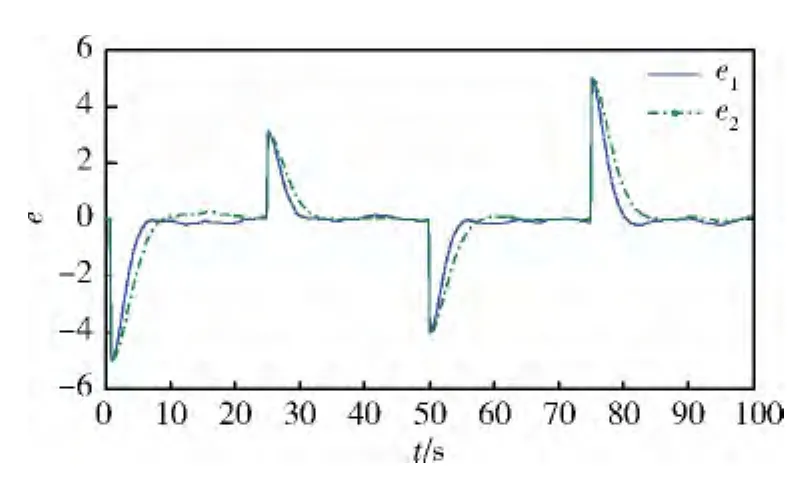
图3 跟踪误差曲线
5 结论
提出了一种基于线性近似的非线性模型预测控制方法。首先运用Stirling插值公式对非线性函数进行线性近似处理,并将模型预测控制性能指标重构为一个二次型最优化问题。最后,通过对二次型最优化问题的求解得到了模型预测控制的最优控制序列。为了降低计算的复杂度,该MPC方案忽略了线性近似过程中产生的非线性高阶项。仿真结果表明,本文的MPC方案能达到较满意的次优控制效果,同时能降低控制能量的消耗,并且大幅缩短了控制时间。本文提出的方法仅为一种启发性方法,在后续的工作中,需要对其稳定性等作进一步研究论证。
[1] 席裕庚,李德伟,林姝.模型预测控制—现状与挑战[J].自动化学报,2013,39(3):222-232.(Xi Yugeng,Li Dewei,Lin Shu.Model predictive control-Status and challenges[J].Acta Automatica Sinica,2013,39(3):222-232.)
[2] 席裕庚.预测控制[M].北京:国防工业出版社,1993.(XI Yugeng.Predictive Control[M].Beijing:National Defence Industry Press,1993.)
[3] 胡跃明,胡终须,毛宗源,李志权.非线性控制系统的近似化方法[J].控制理论与应用,2001,18(2):160-165.(Hu Yueming,Hu Zhongxu,Mao Zongyuan,Li Zhiquan.Approximation methods of nonlinear control systems[J].Control Theory and Applications,2001,18(2):160-165.)
[4] 郭健,陈庆伟,朱瑞军.一类非线性系统的自适应预测控制[J].控制理论与应用,2002,19(1):68-72.(Guo Jian,Chen Qingwei,Zhu Ruijun.Adaptive Predictive Control of a Class of Nonlinear System[J].Control Theory and Applications,2002,19(1):68-72.)
[5] Martin Rau,Dierk Schroder,Model predictive control with nonlinear state space models[C].IEEE,AMC 2002-Maribor,Slovenia,2002,136~141.
[6] 王亚锋,孙富春,张友安,刘华平.一种跟踪问题中的次优非线性预测控制算法[J].控制与决策,2009,24(11),1682-1686.(Wang Yafeng,Sun Fuchun,Zhang Youan,Liu Huaping.Suboptimal model predictive control for nonlinear system on tracking problem[J].Control and Decision,2009,24(11):1682-1686.)
[7] Magnus Norgaard,Niels K Poulsen and Ole Ravn[R].Advances in Derivative-Free State Estimation for Nonlinear Systems,Technical report:IMM-REP-1998-15(revised edition),Technical University of Denmark,Denmark,April 7,2000.
[8] Schei T S.A finite difference method for linearization in nonlinear estimation algorithms[J] .Automatica ,1997,33(11):2051-2058.
[9] Magnus Norgaard,Niels K Poulsen and Ole Ravn.New developments in state estimation for nonlinear systems[J].Automatica,2000,36(11):1627-1638.
猜你喜欢
数学物理学报(2022年4期)2022-08-22
中学生数理化·高一版(2021年2期)2021-03-19
中等数学(2020年2期)2020-08-24
西南石油大学学报(自然科学版)(2019年1期)2019-01-28
测控技术(2018年9期)2018-11-25
中央民族大学学报(自然科学版)(2018年3期)2018-11-09
北京航空航天大学学报(2016年7期)2016-11-16
光学精密工程(2016年3期)2016-11-07
电测与仪表(2016年10期)2016-04-12
电测与仪表(2016年14期)2016-04-11
