
基于逆向导航的捷联自对准技术研究
2015-03-10 10:33梁禄扬刘茜筠
航天控制 2015年5期
梁禄扬 刘茜筠 杨 业
北京航天自动控制研究所,北京100854
初始对准技术是惯性导航的关键技术之一,其结果直接影响到导航系统的精度和准备时间。随着现代战争对武器自主性和快速性要求的提高,研究如何提高捷联惯导自对准精度并缩短对准时间具有重要意义[1]。
目前,常规的自对准方法是按时间顺序正向一次性处理,数据处理完便丢弃,不必存储,其优点是存储量和计算量较小,但后一阶段不能使用前一阶段的数据,信息挖掘不充分,造成浪费。随着计算机技术的快速发展,若导航计算机的容量足够大且计算能力足够强,可对惯组数据进行存储,然后反复处理和分析,这为提高对准精度和速度提供了另一种思路。
文献[2-3]将整个对准时间内的惯组数据存储起来,采用逆向捷联罗经方法进行初始对准,缩短了对准时间,但随着处理次数增加,精度不再明显提高,且存在存储量过大和实时性问题。为减小存储量和计算量,本文仅对粗对准阶段的惯组数据进行存储,利用逆向导航算法将粗对准阶段数据用于精对准,提高了数据利用率,缩短了对准时间。
1 问题及解决思路
初始对准是惯导系统进行导航的前提,它的2个重要指标是准确性和快速性,但2者之间往往相互矛盾。常规初始对准采用一次性处理方式,粗对准和精对准属于串行关系,精对准无法使用粗对准阶段的惯组数据(图1所示)。在精对准中存在这样的矛盾,即一方面丢弃了粗对准阶段的惯组数据;另一方面为了加速滤波器收敛,又希望获得尽可能多的惯组测量信息。在常规数据处理方式下,只有增加对准时间才能获取更多惯组数据,但该方式会影响对准速度,制约武器的快速响应能力。

图1 常规自对准方法
为解决这种矛盾,人们将各种改进的滤波算法引入初始对准,在一定程度上获得了较好的效果[4]。本文从数据处理方式角度出发,将粗对准阶段的惯组数据存储后用于精对准,以达到提高对准性能的目的。首先存储粗对准阶段的惯组数据,并进行解析粗对准,然后利用存储数据逆向导航,最后对整个过程进行卡尔曼滤波精对准,图2描述了新方法的对准过程。
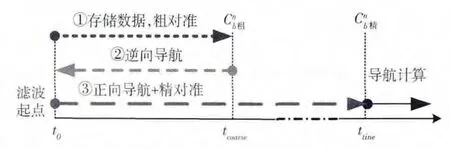
图2 基于逆向导航的捷联自对准算法
2 逆向导航算法研究
为了实现数据正向和逆向处理之间的转换,需要解决逆向导航问题。常规的导航算法是按时间顺序正向计算,而逆向导航算法则是按时间逆序求解,过程恰好与正向导航解算相反。
2.1 正向导航

直接求解上式较为困难,工程中常选用单子样或多子样计算Φ(k)[5]。
2.2 逆向导航

其次,对速度和位置进行逆向计算,将式(8)和(9)作逆向近似变换


3 卡尔曼滤波精对准
卡尔曼滤波作为一种最优估计方法,具有逐步递推的特点,它适用于平稳和非平稳过程,能在计算机上直接实现,因此被广泛应用于初始对准,实践证明具有较好的效果。
3.1 捷联惯导误差模型
捷联惯导误差模型是初始对准的基础,本文采用基于计算地理坐标系的Ψ角法建立误差传播模型。自对准一般是在准静基座下进行,垂直通道与水平通道耦合很小,通常可忽略。将陀螺和加速度计误差近似看作随机常值零偏加上白噪声,因此,将加速度计和陀螺随机常值零偏扩充至状态变量,系统误差方程为


3.2 观测方程
3.3 卡尔曼滤波方程
为适应卡尔曼滤波计算,将系统方程式(16)和观测方程式(17)离散化为
4 仿真分析
以捷联惯组5min测量数据为研究对象,对基于逆向导航的捷联自对准方法和常规自对准方法进行仿真比较,结果如图3所示。常规方法利用前1min数据解析粗对准,然后对剩余4min数据进行精对准。而新方法对前1min数据解析粗对准,并将A点获得的粗对准结果逆向导航至起始点B,使得精对准从B点开始,它可以利用5min的数据量完成精对准,增加了1min的数据量。
常规方式下,偏航角进入-82.43°±0.03°误差带的时间为122s,而新方法仅需66s,缩短了56s,约一个粗对准周期。新方法由于在精对准中利用了粗对准阶段的惯组数据,相同时间内获得的信息量更大,在滤波器相同的条件下,要达到相同的滤波精度,新方法可以缩短约一个粗对准周期的时间。新方法的对准时间取决于精对准滤波器的收敛时间,粗对准不再占用总的对准时间,因此,有效提高了对准速度。
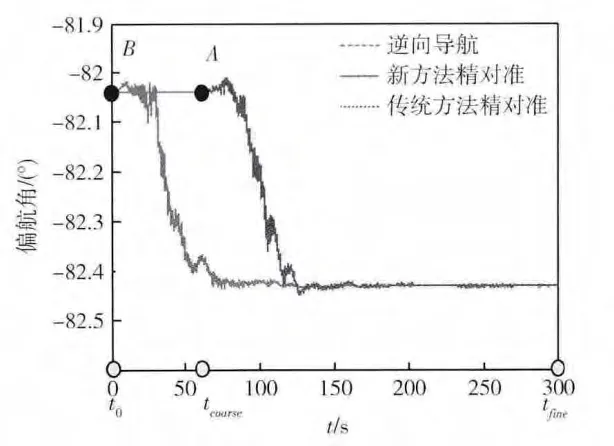
图3 偏航角对准结果比较
观察图3中60~300s时间段的滤波效果,新方法的收敛品质明显优于常规方法,但随时间增加,精度逐渐趋于一致。究其原因,新方法从一开始就利用了粗对准阶段的惯组数据,在有限的时间内获得了更多信息,效果更好;随着精对准时间增加,2种方法获得的信息量之比接近1,对准结果逐渐趋近一致。从仿真结果看出,基于逆向导航的捷联自对准方法由于存储了粗对准阶段的惯组数据,并将其用于精对准,提高了数据利用率,有效缩短了偏航通道对准时间。新方法的对准时间取决于精对准滤波器的收敛时间,粗对准不再占用总的对准时间,它以较小的存储量和计算量二次利用粗对准阶段的惯组数据,有效缩短了对准时间。
5 结论
针对常规自对准方法数据挖掘不充分问题,提出了一种基于逆向导航的捷联自对准方法。与常规自对准相比,新方法实现了对惯组数据的二次利用,提高了数据利用率,在相同时间内获得了更好的收敛品质,有效缩短了对准时间。归根结底,它是以增大计算机容量和计算量来换取对准速度和精度,但随着计算机性能的提升,在导弹武器快速发射需求的牵引下,这种尝试是值得的。
[1] 杨立溪.惯性平台的“三自”技术及其发展[J].导弹与航天运载技术,2000(1):21-24.(Yang Lixi.“Three-autonomy”technique of inertial platform and Its development[J].Missiles and Space Vehicles,2000(1):21-24.)
[2] 严恭敏.捷联惯导系统动基座初始对准及其它相关问题研究[R].西北工业大学,2008:13-20.(Yan Gongmin.On SINS in-movement initial alignment and some other problems[R].Northwestern Polytechnical University,2008:13-20)
[3] 菇如山,赵忠华.基于逆向算法的捷联罗经快速对准技术研究[J].电子测量技术,2011,34(1):46-50.(Ru Shushan,Zhao Zhonghua.Study on fast alignment method of strapdown gyrocompass based on converse algorithm[J].Electronic Measurement Technology,2011,34(1):46-50.)
[4] 杨亚非,谭久彬,邓正隆.惯导系统初始对准技术综述[J].中国惯性技术学报,2002,10(2):69-71.(YANG Ya fei,TAN Jiu bin,DENG Zheng long.Review of technique for initial alignment of inertial navigation systems[J].中国惯性技术学报,2002,10(2):69-71.)
[5] 秦永元.惯性导航[M].北京:科学出版社,2006:311-317.
猜你喜欢
测控技术(2018年2期)2018-12-09
当代陕西(2018年12期)2018-08-04
北京航空航天大学学报(2017年5期)2017-11-23
中国惯性技术学报(2017年1期)2017-06-09
北京航空航天大学学报(2017年12期)2017-04-23
导航定位与授时(2016年4期)2016-03-16
火控雷达技术(2016年1期)2016-02-06
中国惯性技术学报(2015年1期)2015-12-19
探测与控制学报(2015年4期)2015-12-15
弹箭与制导学报(2015年1期)2015-03-11
