某火箭炮高低行军固定器设计与仿真分析
2015-06-23 13:52崔二巍
火力与指挥控制 2015年6期
崔二巍,王 东
(1.中国兵器工业集团第202研究所,陕西 咸阳 712099;2.贵州航天天马机电科技有限公司,贵州 遵义 563000)
某火箭炮高低行军固定器设计与仿真分析
崔二巍1,王 东2
(1.中国兵器工业集团第202研究所,陕西 咸阳 712099;2.贵州航天天马机电科技有限公司,贵州 遵义 563000)
根据某火箭炮的特点和行军固定器的设计要求,对比各种锁紧方式的优缺点,为其设计了机械式高低行军固定器,通过计算初步确定了楔形块和驻钩上斜面的倾角、回复弹簧的刚度系数等主要参数。在Adams中仿真行军固定器的锁紧、解锁和受冲击载荷作用的过程,检验其是否能满足使用要求。根据动力学仿真结果得到的载荷数据,在Abaqus中对行军固定器的关键部件支臂进行有限元分析。仿真和计算结果表明:行军固定器可实现自动锁紧,解锁过程所需的手柄力符合设计要求,在冲击载荷作用下锁紧可靠,支臂的刚强度满足要求。
高低行军固定器,结构设计,锁紧,解锁,仿真
0 引言
行军固定器作为火箭发射装置的一个重要辅助机构,在行军时牢靠地固定火箭发射装置的俯仰部分和回转部分,防止发射装置各部分因行军振动冲击而受到损坏;在瞄准、射击时解除限制。为提高火箭武器的快速反应能力,行军固定器在行军和战斗状态之间转换时,应动作迅速,缩短转换时间。行军状态下,由于发射装置俯仰和回转部分惯性力和冲击力的作用,行军固定器受力较大,因此,必须保证其有足够强度和刚度。在满足以上要求的前提下,结构应尽量简单,这样既便于操作使用,也便于加工制造和维护保养[1]。行军固定器按其操作方式分为自动、半自动、和手动3类。
由于某火箭炮特殊的战术要求,需要行军固定器在高低方向上承受更为剧烈的冲击,对可靠性要求更加严格,而且结构应尽可能简单,锁紧和解脱过程操作方便。针对该火箭炮的特点,文中为其设计了固定俯仰部分运动的高低行军固定器,并对设计结果进行仿真分析。
1 结构设计
1.1 锁紧方式的选择
行军固定器的锁紧方式主要有液压式、气动式、电机式和机械式4种[2],每种锁紧方式的优缺点如表1所示。
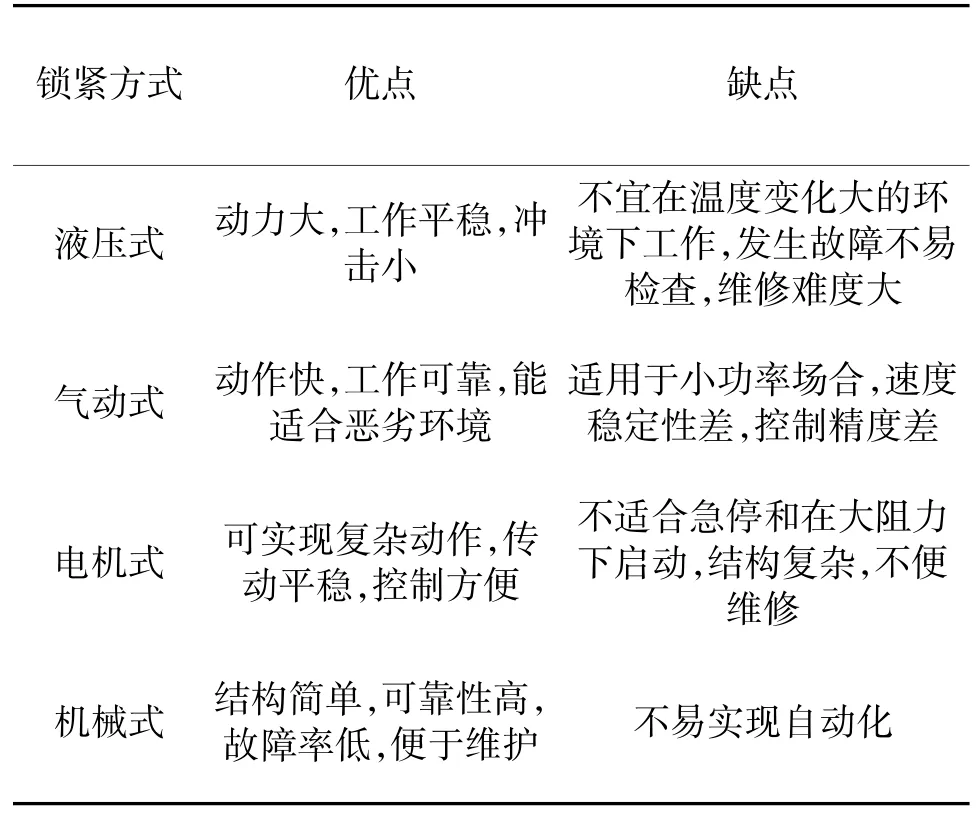
表1 4种锁紧方式的优缺点
根据该火箭炮行军固定器高可靠性、结构简单、操作方便的设计要求,比较表1中的4种锁紧方式,决定采用机械式锁紧,通过机械部件之间的相互配合作用实现锁紧。
1.2 总体结构设计
高低行军固定器限制火箭炮俯仰方向的运动,即摇架绕耳轴的转动,其与火箭炮的装配关系如图1所示。

图1 高低行军固定器与火箭炮装配图
其中,高低行军固定器的具体结构如图2所示。
高低行军固定器分为上下两部分,上部分为支臂,固定于摇架的横梁;其余为下部分。安装座固定于发射装置的底座,其底部装有转轴;驻钩和手柄分别通过花键与转轴相连,扳动手柄可带动驻钩绕转轴转动;回复弹簧两端通过销钉分别与安装座和驻钩相连;楔形块在滚珠丝杠带动下可沿安装座上表面的导轨滑动。
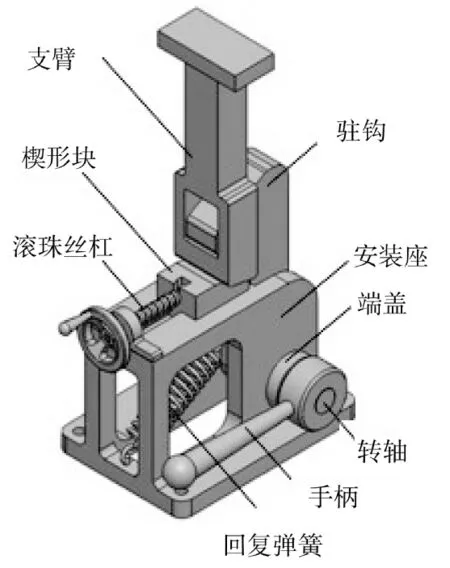
图2 高低行军固定器
高低行军固定器的锁紧和解锁状态如图3所示,锁紧和解锁位置设置限位机构。
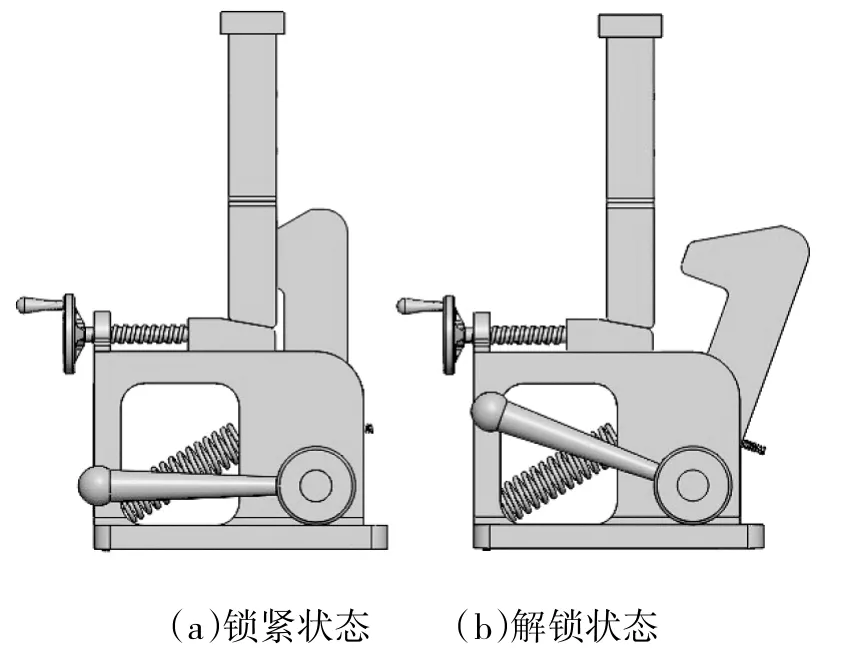
图3 高低行军固定器的锁紧和解锁状态
锁紧时,将火箭炮的方向角调整为0°,支臂随摇架放下后恰好能与行军固定器下部分对准。摇架绕耳轴向下转动,支臂与驻钩上斜面接触后,挤压驻钩使其绕转轴向外转动,当驻钩的钩舌对准支臂的沟槽时,驻钩在回复弹簧的作用下回到竖直位置,钩舌伸入沟槽。转动滚珠丝杠手轮,使楔形块向前运动直至牢牢顶住支臂。摇架向上的运动由驻钩锁定,向下的运动由楔形块和摇架支撑座锁定。
解锁时,将手柄向上扳动20°,驻钩的钩舌从支臂的沟槽内伸出,行军固定器解锁,可调整火箭炮的高低角。
1.3 楔形块和驻钩斜面倾角的确定
为保证锁紧可靠,应使支臂底面与楔形块上斜面之间实现自锁[3],无论受到多大的向下冲击力,楔形块与支臂都不会相对滑动。查阅机械设计手册,支臂与楔形块材料间摩擦系数为μ=0.17,摩擦角:
斜面倾角小于该摩擦角时即发生自锁,因此,取楔形块上斜面倾角为10°。
锁紧过程中支臂挤压驻钩上斜面,若斜面倾角过小而发生自锁,无法完成自动锁紧。驻钩向外转动,其上斜面与水平面的夹角不断变小,越容易发生自锁。当转角为φ1=13°时,支臂与上斜面脱离。保证脱离时刻不发生自锁,则整个过程都不会自锁。查阅机械设计手册,支臂与楔形块材料间摩擦系数为μ=0.17,摩擦角:

为保证不发生自锁,则驻钩上斜面倾角至少应大于:
取驻钩上斜面倾角为30°,在该角度下,整个锁紧过程支臂与驻钩上斜面之间都不会发生自锁。
1.4 回复弹簧刚度的确定
回复弹簧刚度过大,锁紧时支臂与驻钩之间的碰撞力增大,解锁时所需的手柄力也增大,操作不便;刚度过小,则不能可靠地将驻钩保持在锁紧位置。
手柄向上扳动20°到解锁位置,此时弹簧伸长量最大,所需手柄力也最大。根据一般战士的体力和操作方便原则,设最大手柄力为60 N[4]。为保证锁紧可靠,设驻钩在竖直位置时弹簧初始拉力F0为50 N。忽略摩擦和驻钩自身重力对转轴的力矩,则在解锁过程中,手柄和弹簧对转轴的力矩平衡,设手柄力作用方向始终垂直于手柄,则有:

其中,F1为手柄力,H1为手柄力作用点与转轴中心点距离,根据手柄几何尺寸,H1为130 mm,F2为回复弹簧拉力,H2为其力臂。
解锁过程的示意图如图4所示。
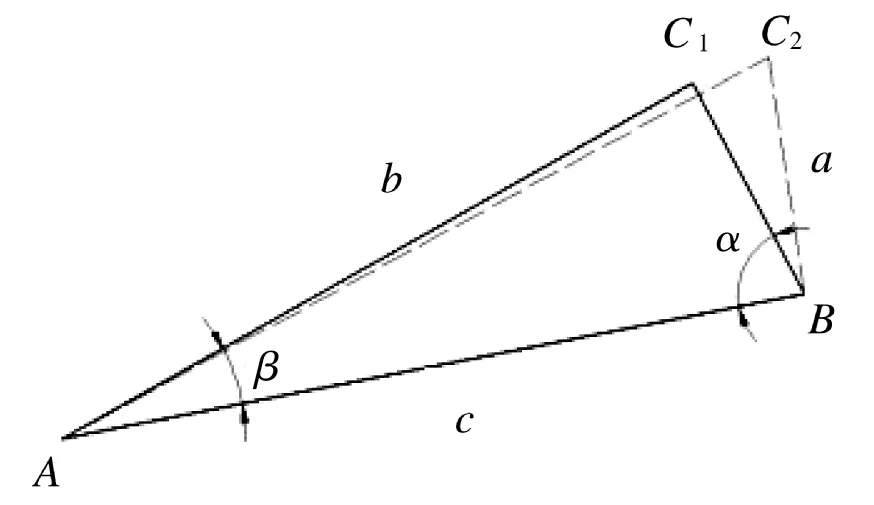
图4 解锁过程示意图
其中,点A为回复弹簧与底座连接点,点B为转轴中心,C1和C2分别为锁紧和解脱状态时回复弹簧与驻钩连接点的位置。
由图中几何关系计算可得:

驻钩在解锁位置时,所需回复弹簧拉力
回复弹簧拉力增大量

回复弹簧伸长量

刚度系数
因此,初步选定回复弹簧刚度系数为10 N/mm,并在后续仿真中验证解锁过程手柄力是否符合要求,自动锁定过程能否顺利完成,锁紧是否可靠。
2 动力学仿真分析
2.1 锁紧过程仿真分析
在Adams软件中仿真高低行军固定器的锁紧过程。设仿真初始状态火箭炮方向角为0°,高低角为5°,驻钩在竖直位置,支臂在驻钩上方,两者未接触。摇架以的角速度向下转动,5 s后到达锁定位置并停止运动,仿真过程持续6 s。以驻钩初始位置为基准,自动锁紧过程中驻钩绕转轴的转角变化如图5所示。
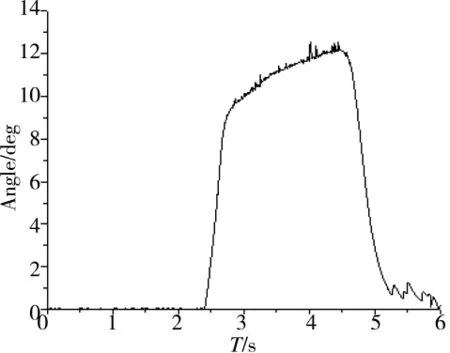
图5 锁紧过程驻钩转角变化曲线

图6 锁紧过程支臂与驻钩之间接触力
由图中可得,支臂在2.4 s时与驻钩上斜面发生接触,挤压驻钩向外转动。支臂与驻钩上斜面接触时转角增大速度较快;支臂从驻钩上斜面滑下后与钩舌的前端面接触,转角增大速度变缓;之后驻钩的钩舌伸入支臂的沟槽,驻钩在回复弹簧作用下快速回到竖直位置,锁紧到位后有轻微的振动。锁紧过程支臂与驻钩之间的接触力如图6所示。
2.2 解锁过程仿真分析
在Adams软件中仿真高低行军固定器的解锁过程。手柄在2 s内由初始水平位置匀速向上转动20°到达解锁位置。由于仿真中无法直接得到解锁过程的手柄力,根据1.4节中的式(1)和式(2),手柄力可由回复弹簧拉力和角α计算得到:

由解锁过程的仿真结果可得到回复弹簧拉力和角α的变化曲线,根据式(3)计算,解锁过程的手柄力如图7所示。
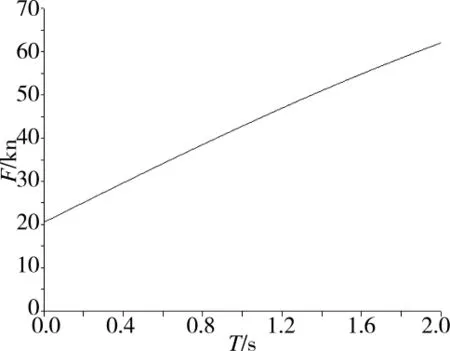
图7 解锁过程手柄力曲线
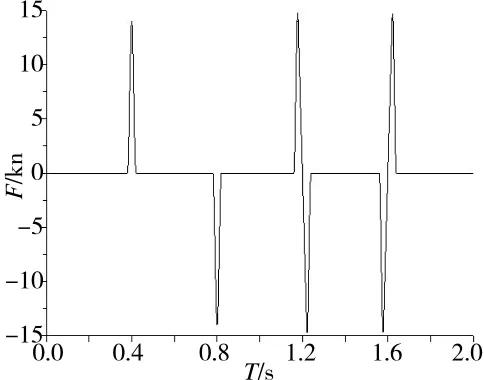
图8 冲击载荷
由图7可得,解锁过程中手柄力不断增大,但并非线性增大,解锁到位时手柄力达到最大值62 N,满足手柄力的设计要求。
2.3 冲击载荷作用过程仿真分析
行军时,由于俯仰体惯性力和冲击力的作用,高低行军固定器受力较大。为检验其锁紧可靠性,在Adams软件中仿真冲击载荷作用的过程。锁紧状态下,在摇架上施加如图8所示的冲击载荷(向上为正方向)。
在该冲击载荷下,楔形块对支臂向上的支持力和驻钩对支臂向下的拉力如图9和10所示。
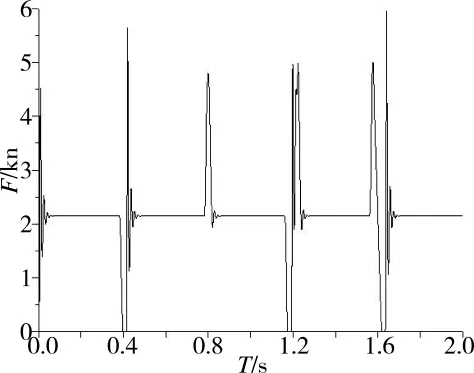
图9 楔形块对支臂的支持力

图10 驻钩对支臂的拉力
由图9可得,在仿真建立的初始时刻,由于摇架及安装于摇架上的整个俯仰体的重力突然作用,楔形块对支臂向上的支持力振荡后趋于稳定值。摇架受到向上的冲击时,支持力减小,冲击消失后,由于俯仰体的重力作用,支持力发生较大的振荡;而受到向下的冲击时,支持力增大,冲击消失后支持力振荡很小。由图10可得,只有摇架受到向上的冲击时,驻钩才会对支臂有向下的拉力,冲击消失后拉力即变为零。
整个冲击载荷作用的过程,驻钩和楔形块均稳定地保持在锁紧位置,能为支臂提供所需的锁紧力,高低行军固定器锁紧可靠。
3 有限元仿真分析
支臂作为行军固定器的关键部件,受力情况最复杂,必须保证有足够的刚强度。由动力学仿真结果可知,行军状态下受到冲击载荷作用时,支臂受力最大,冲击最严重。在Abaqus有限元软件中仿真支臂受冲击载荷作用的过程,验证其强度是否满足要求。
支臂材料选用45钢,上端面固定,根据2.3节中的动力学仿真结果为支臂施加载荷。由于支臂与楔形块、驻钩之间力的作用均为面接触,因此,按作用面积的大小,将图9和图10中的作用力换算为随时间变化的均布压强,在作用面上施加载荷。经Abaqus仿真分析,支臂的应力云图如图11所示。
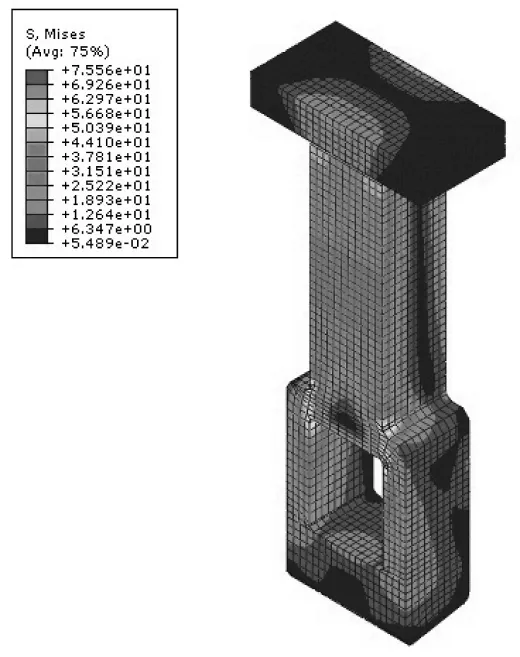
图11 支臂的应力云图
仿真结果显示,在整个冲击载荷作用的过程中,应力最大值为95.6 Mpa,远小于材料的屈服极限,因此满足使用要求。
4 结论
根据某火箭炮的特点为其设计了机械式高低行军固定器。动力学和有限元仿真结果表明,该行军固定器可自动锁紧,解锁过程的手柄力符合设计要求,在冲击载荷作用下依然能可靠地锁紧,支臂作为行军固定器的关键部件,受冲击最严重,其刚强度满足使用要求。
[1]吴秉贤,严世泽,龚龙兴.火箭发射装置结构分析[M].北京:国防工业出版社,1988.
[2]徐周伟.行军固定器的运动及力学分析[D].成都:电子科技大学,2009.
[3]申永胜.机械原理教程 [M].北京:清华大学出版社,1999.
[4]丁玉兰.人机工程学[M].北京:北京理工大学出版社,2005.
Design and Simulation Analysis of Elevation Marching Fixture of a Rocket Launcher
CUI Er-wei1,WANG Dong2
(1.No.202 Institute of China Ordnance Industry Corporation,Xianyang 712099,China;
2.Guizhou Aerospace Tianma Electro Mechanicals Co.,Ltd,Zunyi 563000,China)
According to the features of a rocket launcher and the design requirements of marching fixture,the advantages and disadvantages of the various of lock modes are contrasted,and then a mechanical elevation marching fixture is designed.The wedge’s and the hook’s tilt angles and the spring’s stiffness coefficient are determined preliminarily by computing.The process of the marching fixture locking,unlocking,and being affected is simulated by impact load in Adams,and investigated whether it worked well.The result of load data is used to make finite element analysis of the supporting arm in Abaqus.The simulation results show that the marching fixture can lock automatically,the unlocking handle force meet the design requirements,the marching fixture can lock reliably under the condition of impact load,and the supporting arm’s stiffness and strength can meet the requirement.
elevation marching fixture,structure design,lock,unlock,simulation
TJ393
A
1002-0640(2015)06-0159-04
2014-05-06
2014-06-17
崔二巍(1989- ),男,山西晋城人,硕士研究生。研究方向:火箭发射装置。
猜你喜欢
客联(2022年3期)2022-05-31
政工学刊(2021年3期)2021-11-25
现代仪器与医疗(2021年4期)2021-11-05
雪豆月读·中年级(2021年5期)2021-09-10
考试与评价·高二版(2020年1期)2020-09-10
阅读与作文(英语高中版)(2019年8期)2019-08-27
故事作文·低年级(2018年12期)2018-12-17
湘潮(2018年1期)2018-01-22
现代兵器(2016年4期)2016-04-27
中国青年(1949年23期)1949-08-17