
纯电动汽车电液制动系统及控制策略
2015-09-04 06:07樊少军薛建高左华山范树军
汽车工程师 2015年11期
樊少军 薛建高 左华山 范树军
(第二炮兵工程大学士官学院)
由于受电池和电机等技术的限制,纯电动汽车的续驶里程短和成本高这2个问题严重地阻碍了其商品化。再生制动可以通过电机将汽车的动能或者势能转化为电能储存在蓄电池中以备下次驱动所用,这样就可以降低纯电动汽车的能耗,提高纯电动汽车的经济性能。因此,在目前的纯电动汽车关键技术研究中,再生制动已成为一种降低能耗、提高续驶里程和汽车节能与环保的关键技术手段,而再生制动的实施要基于良好的电液制动系统和有效的综合控制策略。文章主要论述再生制动系统的意义、工作原理和电液复合制动系统的控制策略。
1 纯电动汽车再生制动的概念
1.1 纯电动汽车能量损耗情况介绍
与传统汽车相比,能够进行再生制动是纯电动汽车的一个显著优点,这样既可以提高纯电动汽车的续驶里程,又可以减轻传统制动系统的工作负荷。汽车在工作过程中各部分消耗的能量占总能耗的比例[1],如图1所示。
从图1可以看出,大约只有一半的驱动能量用于汽车的正常行驶。如果能将制动消耗的能量回收再利用,同样的距离将只需要大约一半的驱动能量,汽车的能耗经济性将得到很大的提高。然而传统的机械摩擦制动使得这一部分能量都以热能的形式耗散掉了。因此在纯电动汽车的制动系统中实现再生制动功能具有非常现实的意义。
1.2 纯电动汽车制动能量回收的研究现状
纯电动汽车采用电制动时,驱动电机运行在发电状态,将汽车的部分动能回馈给蓄电池以对其充电,对延长纯电动汽车的行驶距离是至关重要的。国外有关研究表明,在存在较频繁的制动与启动的城市工况运行条件下,有效地回收制动能量,可使纯电动汽车的行驶距离延长10%~30%。制动能量回收要综合考虑汽车动力学特性、电机发电特性、电池安全保证与充电特性等多方面的问题。纯电动汽车和混合动力电动汽车最重要的特性之一是显著回收制动能量的能力。在纯电动汽车和混合动力电动汽车中,电动机可被控制作为发电机运行,从而将汽车的动能或位能变换为电能,并储存在能量存储装置(各种蓄电池、超级电容、超高速飞轮或者它们之间的复合)中,得以再次利用,以延长其续驶里程。而制动能量回收较有意义的汽车还有城市公交车,城市公交车工况参考数据,如表1所示。
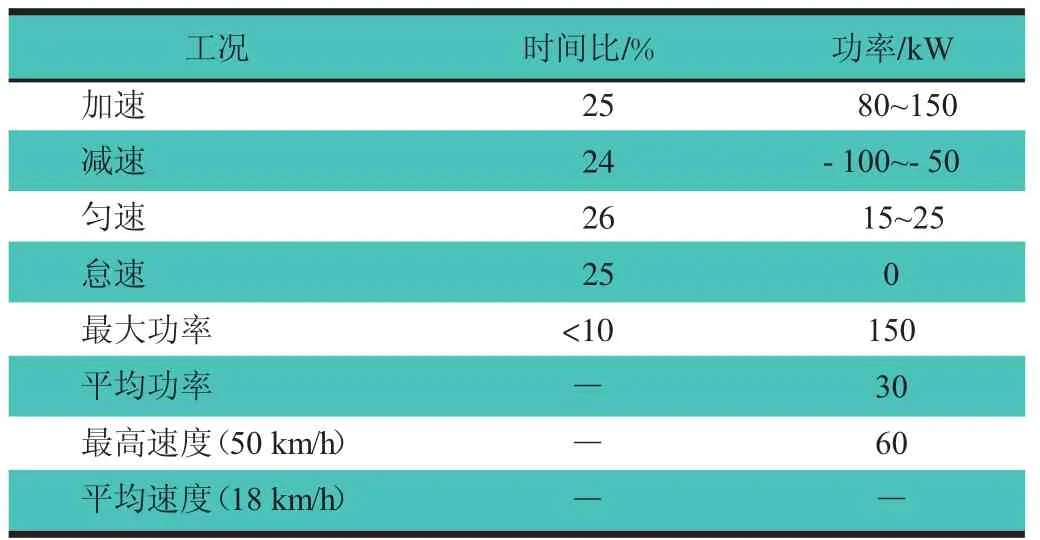
表1 城市公交车工况参考数据
由表1可知,其减速的功率较大,达到-100~-50kW(这也是因为纯电动汽车或混合动力电动汽车本身装备了一个较大功率的电动机,使得回收制动能量可行),占的时间比约为24%,制动消耗的能量占牵引能量的比重较大。由于城市公交车目前一般为内燃机动力,故如何低成本有效回收其制动能量具有一定的难度。
对于汽车,成功地设计其制动系统必须始终满足2个截然不同的要求。首先,在紧急制动状态下,必须促使汽车在尽可能短的距离中停止;其次,必须保持对于汽车方向的控制。前者要求在所有的车轮上制动系统能供给足够的制动转矩,后者要求在所有的车轮上平均分配制动力。一般而言,当纯电动汽车或混合动力汽车减速、在公路上放松加速踏板巡航(有相关的算法判断)或踩下制动踏板停车时,再生制动系统启动。正常减速时,再生制动的力矩通常保持在最大负荷状态;纯电动汽车或混合动力汽车高速巡航时,其电动机一般是在恒功率状态下运行,驱动扭矩与驱动电机的转速或车速成反比。因此,研究纯电动汽车的制动模式也非常重要。
由于制动能量回收工作主要在城市工况下有较大意义,而城市工况车辆的最高车速不会太高,且紧急制动的概率较小,所以应将研究重点放在中轻度刹车制动能量回收方向上。
图2示出电动机再生制动和液压制动系统复合示意图。电动机的再生制动力矩通常不能像传统燃油车中的制动系统一样提供足够的制动减速度,所以,在纯电动汽车和混合动力电动汽车中,再生制动和液压制动通常共同存在。不过,只有当再生制动已经达到了最大制动能力而且还不能满足制动要求时,液压制动才起作用。因此,液压与再生制动系统两者的特定设计和控制是重要的关注点。
2 再生制动的工作原理
再生制动就是汽车制动时,保持电机与传动系的有效连接,利用电机的回馈制动特性将汽车的动能或势能转化为电能储存到电池等储能装置中,用于下一次汽车驱动加速所用,同时通过传动系向驱动车轮提供制动力矩[2]。虽然纯电动汽车有不同的结构形式,但其制动系统都由再生和摩擦制动系统组成,制动的工作模式有3种,如图3所示。其再生制动的具体工作原理,如图4所示。
再生制动系统的组成,如图5所示,其中电机制动系统与液压制动系统合称为电液复合制动系统。控制器的作用是根据驾驶员的制动意图,利用再生制动力分配控制策略实现电机制动力和机械制动力的分配,并控制相应的执行机构追踪目标信号;再生制动操纵机构负责正确识别驾驶员的制动意图,即制动强度和保证驾驶员的制动感觉与传统制动系统的感觉相一致,并且当再生制动系统失效时,能保证液压制动系统正常工作;液压制动单元要能够提供由控制器输出的机械制动力的大小;电机和电池系统负责提供控制器输出的电机制动力和回收并储存制动能量。
事实上,并不是所有的纯电动汽车制动能量都可以通过再生制动的功能来实现回收与利用,在纯电动汽车上,只有驱动轴上的制动能量可以沿着与之相连接的驱动轴通过电机的发电特性将制动能量转化为电能并传送至电池装置中,而制动能量的另一部分将由非驱动轴上或驱动轴上的车轮通过机械摩擦制动以热能的形式浪费掉。驱动轴上的制动能量也不能通过再生制动来完全回收,制动能量回收时还受到许多因素的限制,例如:再生制动的回收功率不能超过电池当前的最大充电功率、电机发电能力的限制、电池充电功率的限制、电机制动产生的最大制动转矩不能超过当前转速和功率下电机发电能力、车速较高时电机再生制动扭矩不能满足大强度制动要求及驱动系布置方案的限制等。因此设计一套高效的电液复合制动系统,并配套合理的综合控制策略将大大提高再生制动对整车燃油经济性提高的贡献。
3 电液复合制动系统控制策略
由于纯电动汽车行驶过程中存在着不同的制动状态,在小强度或中等强度制动时,为提高制动能量回收效果,通常优先考虑再生制动,整车制动力不足的部分则由液压制动来补充;当车轮出现抱死或电池不允许回收制动能量时,为保证整车制动安全性,通常不采用再生制动,只采用液压制动。因此传统汽车的制动系统难于满足纯电动汽车的制动需求,不能直接用于纯电动汽车中。
3.1 ABS综合控制策略
传统汽车的制动系统无论是机械式、气动式、液压式还是气液混合式,它们的制动原理都是相同的,即依靠制动器摩擦的方式来消耗掉汽车行驶的动能或势能,从而达到减速的目的[3]。纯电动汽车再生制动的基础是传统轿车的液压制动系统,因此在达到能量回收目的的同时,不改变传统轿车制动习惯就显得尤为重要。但是,传统的制动系统无法最大限度地配合电机进行再生制动,并且由于再生制动的加入改变了驾驶员传统的制动感觉,这样制动能量的回收效果就会受到限制,因此对传统制动系统做适当的改造来达到再生制动的功能是必要的。ABS(制动防抱死装置)越来越多地应用在传统汽车中。ABS的核心部件为高速开关阀,高速开关阀与脉宽调制(PWM)控制相结合后,可以通过控制一定频率的脉冲宽度来实现对液压压力的连续控制[4]。
所以通常将采用ABS硬件单元作为电液复合制动系统中液压制动力的控制元件,同时制定适当的综合控制策略,通过电液复合制动系统和综合控制策略的完美组合以实现最大限度地配合电机进行再生制动,从而达到良好的能量回收率和制动安全性。
3.2 协调制动控制策略
协调制动控制策略的首要目标是利用电机响应速度和响应精度的优势改善制动系统的响应特性,使电机和EVB(电子真空助力)提供的制动转矩之和满足需求制动转矩,以保证制动安全性。结合电机与EVB动态响应特性,协调制动控制策略的基本思想是:通过基于期望制动转矩预测的EVB预测启动控制策略,保证EVB接入过程中的安全性;通过基于电机制动转矩动态补偿的制动转矩协调控制策略,精确响应需求制动转矩的变化。综合考虑制动转矩大小和能量回收能力,将制动分为3个模式:经济性制动模式、SOC低时的安全性制动模式和SOC高时的安全性制动模式。
制动过程中,随着需求制动转矩和制动能量回收能力的改变,系统进入不同的制动模式。进入经济性制动模式时,只需要电机单独制动;如果进入SOC低或SOC高时的安全性制动模式,则首先采取EVB预测启动控制策略,然后进行制动转矩协调控制。如果电机制动系统和EVB制动系统分别响应协调制动控制策略中的电机制动转矩指令和EVB制动转矩指令,则由电机转矩和EVB制动转矩共同实现对汽车的制动。
4 结论
再生制动是电动汽车的一项关键技术,再生制动不仅能通过回收制动能量来降低整车能耗,而且可以减轻液压制动器的负荷及制动器的磨损。由于电动汽车再生制动系统是液压制动和电机再生制动的复合系统,所以在制动过程中液压制动力和再生制动力的协调控制是保证制动安全性和最大化回收制动能量的重要保障,是再生制动的技术难点。
文章提出的电液制动系统只是从理论分析和策略的角度提出了电液制动系统的可行性,后续的研究主要是建立电动汽车电液制动系统压力协调控制的仿真平台,以及电液制动系统和压力协调的控制问题,从而在硬件上实现ABS防抱死制动、再生制动和摩擦制动的集成。通过制定全路面条件下的制动力分配控制策略和基于路面识别的ABS防抱死控制策略,高度集成ABS防抱死制动、再生制动和摩擦制动的控制算法,来有效提高制动能量回收率和制动安全性。
猜你喜欢
汽车实用技术(2022年14期)2022-07-30
北京航空航天大学学报(2022年6期)2022-07-02
防爆电机(2022年2期)2022-04-26
昆明医科大学学报(2021年12期)2021-12-30
防爆电机(2021年5期)2021-11-04
科学导报·学术(2020年49期)2020-12-06
北京航空航天大学学报(2020年10期)2020-11-14
汽车零部件(2019年7期)2019-08-16
民用飞机设计与研究(2019年2期)2019-08-05
电机与控制学报(2018年9期)2018-05-14
