
宏/微双重驱动的新型直线电机研究*
2015-09-16 00:42张铁民华南农业大学工程学院广东广州510642
机电工程技术 2015年6期
张铁民(华南农业大学工程学院,广东广州510642)
宏/微双重驱动的新型直线电机研究*
张铁民
(华南农业大学工程学院,广东广州510642)
大行程、高精度,同时易于小型化的移动机构是先进制造业等领域要解决的关键问题之一,综述了现有宏/微双重驱动机构和直线超声电机的研究进展和存在问题,提出了一种宏微双重驱动新型直线压电电机,使其既能与超声电机一样,直接驱动、响应快、不受磁场干扰实现宏驱动;又能与微驱动一样,精密定位,实现微驱动,并把宏微运动结合起来,在一个电机上同时实现宏微驱动,通过有限元分析软件,计算复合振子的振动模态和静态变形,分析了宏微驱动原理,给出了宏微驱动新型直线电机驱动电源的设计方案。
宏/微双重驱动;直线电机;超声电机;微驱动
随着IC(Integrated circuit)制造中芯片光刻与封装、MEMS(Micro-Electromechanical Sys⁃tem)制造中的器件封装与组装、生物医学工程中的高速点样移液、高速精密加工及高速扫描检测等领域的迅速发展,对定位系统的行程、速度、加速度和精度提出了更高的要求,高速高精度定位系统的研究应运而生。然而,定位精度与系统运动速度、行程的提高相互矛盾,高精度定位希望机构运动平缓,而高生产率又希望系统高速大行程运动并高速启停,即高速大行程与高精度相互矛盾。如何较好地解决这些矛盾,实现大行程、高速机械运动系统的精密定位已成为当前芯片封装界一个亟待解决的问题。
目前,我国芯片封装设备工业水平与国外先进水平仍有较大差距,国内芯片封装设备的85%依赖进口,在西方发达国家技术封锁下,高端的芯片封装设备引进受到制约,芯片封装水平将阻碍我国成为二十一世纪世界IC制造强国之一。因此,迫切需要开展面向先进芯片封装等先进制造领域的高精度定位技术的研究。
1 宏微驱动机构研究现状
由于精密定位技术应用领域的广泛性、对高科技发展影响的重要性,因而一直是各个发达国家的科研机构、高等院校和大型企业研究的重点。在IC制造产业中,关键部件就是实现高位置分辨率、高可靠性、具有较大行程和高精度定位的直线推进运动。
现有高分辨率直线推进运动普遍借助于旋转电动机旋转运动,加上滚珠丝杠而获得的直线运动,再加上微动台实现宏微驱动,如图1所示[1]。

图1 宏微双驱动结构示意图
1.1国内研究现状
国内研究精密定位技术的科研机构和高等院校非常多,哈尔滨工业大学、吉林大学、清华大学、西安交大、浙江大学、吉林大学、西安理工大学、中国科学院长春光机所和成都光电所等单位对大行程精密定位进行了比较多的研究工作,近年来台湾地区对该领域的研究也非常活跃[1~5]。
哈尔滨工业大学王立松研制的宏微两级驱动双定位工作台,该工作台采用直线电机进行大行程驱动,电致伸缩微位移器完成精定位,单频激光干涉仪实现闭环位置反馈,用频率法建立定位系统的模型,采用PID控制方法,实现了500mm工作行程内小于20 nm的重复定位精度。王波等人在超精密车床上利用滚珠丝杠的微动特性所进行的纳米定位研究,利用滚珠丝杠的微动特性,同样可以实现纳米级的定位精度。
浙江大学现代光学国家重点实验室的米凤文等人研制的大行程精密定位系统,它采用粗、精两级定位方式,伺服电机带动机械传动系统实现粗定位,压电陶瓷实现工作台的精定位。
中科院成都光电所谢传钵研制的分步重复投影光刻机精密快速定位也采用粗、细结合方式,粗定位采用滚珠丝杠螺母机构和滚动导轨,细定位采用分辨率为10 nm的压电尺蠖驱动。
清华大学朱煜等人与上海微电子设备有限公司合作研究的步进扫描投影式光刻机超精密工件台是一种宏微两级定位系统,它采用气浮导轨支撑、直线电机驱动、直线光栅尺反馈组成大行程直线运动系统,其上叠加洛仑兹电机驱动的气浮微动台,提供对直线电机的精度补偿。
西安交通大学的压印光刻机宏、微两级超高精度定位系统中,采用弹性力学理论,对精定位台的静、动参数进行了分析和估算,确定了系统的自然频率,并由此设计出双伺服环的控制系统;在控制软件中采用Chebyshev数字滤波器去除信号中的噪声,使整个定位系统在200mm的行程中,定位精度达到了8 nm。
台湾中正大学研制的大行程纳米定位工作台,在滚珠丝杠上装两个螺母,中间夹着PZT,先用滚珠丝杠螺母机构加上抖动信号粗定位以消除机构的爬行现象,然后再利用PZT进行精定位。淡江大学和修平技术学院共同研制的大行程纳米定位系统,它采用绞盘机驱动方式、气浮导轨支撑的单层工作台,分辨率为5 nm的HP激光干涉仪作为位置反馈测量装置,模型参考自适应控制,在50 nm、500 nm和10μm三种步距实验中都获得了小于±15 nm的(步距)定位精度,并且无过冲,抗干扰能力很强。
1.2国外研究现状
国外对大行程精密定位技术进行研究的国家非常多,除了美国、日本等传统的精密机械技术强国外,近年来韩国对该领域的研究也非常深入[6~8]。
North Carolina大学和MIT共同研制的用于扫描探针显微镜的六自由度磁悬浮扫描工作台,工作范围是25mm×25mm×0.lmm,定位精度达到了10 nm。
东京工业大学精密及智能实验室研制的气体静压工作台纳米定位系统,它采用有刷直流电机,轴承、导轨和丝杠螺母采用气体静压方式,PID控制器。这也是单层工作台的纳米定位系统。该定位系统位置反馈所用激光干涉仪的分辨率仅为0.3 nm,使得定位精度达到了±2 nm,由于采用了丝杠螺母的驱动形式,定位行程达到了400mm。
韩国首尔大学研制的一种宏微两级定位纳米工作台,宏动台采用滚珠丝杠螺母机构,微动台用PZT加柔性铰链机构。该工作台采用双伺服控制的方法,宏动台的位置反馈用编码器,微动台的位置反馈用激光干涉仪,定位行程达到200mm,精度为10 nm。韩国电子技术研究所研制的一种用于微装配和半导体设备上的尺镬式驱动器,它采用外差激光干涉仪作为伺服反馈装置,定位行程达到100mm,速度为10.2mm/s,移动步距为50 nm。韩国高等理工学院SungQ.Lee等人研制了音圈驱动器和空气支承滑台,采用连续增益调整控制方法,实现了100mm行程、50 nm步距的定位运动[9~13]。
法国Compiegne工业大学的SamirMekid用无刷直流电机摩擦传动、液体静压支承构成了高精度直线滑台,并采用内模控制的方法实现了较大行程的纳米定位,该滑台有较大的承载能力和工作行程,定位精度高,但10mm/s的运动速度并不算高。
1.3存在的问题
上述传统电磁电机或者再加上一套变换机构组成宏直线运动,微动台组成的微直线运动,宏微直线运动叠加构成了大行程高分辨率宏微运动装置,不可避免的存在传统电磁电机的诸多缺点,如电磁场干扰,同时宏、微驱动从机械结构到驱动控制系统都是各自独立,体积庞大、结构复杂、传动链长,需要分别对电磁电机和微动台进行驱动控制,使机构体积和重量进一步小型化和提高运动精度都十分困难,其产品性能、质量很难进一步提高,难以满足当今电子信息产业对直线电机精度、速度及结构等要求[14-15]。
2 超声电机研究进展
超声电机是利用压电元件的逆压电效应使定子产生高频(超声波)振动而驱动转子(或滑块)运动的一种新型电机,它与传统的电磁电机相比有着完全不同的原理和结构,因而具有一些电磁电机所没有的特点[16-17],已引起人们的广泛关注。
2.1国外超声电机研究进展
上世纪八十年代以来,日本人主要研究旋转型压电微电机并走向实用化,广泛应用于照相机、医疗、汽车、机器人、航空航天等领域[14-17]。与此同时,日本著名学者指田年生(T.Sashida)、宫崎、黑泽实(M.Kurosawa)、高野刚浩(T. Takano)、上羽贞行(S.Ueha)、富川义朗(Y. Tomikawa)等先后对直线型超声电机进行了研究。
1998年美国Anorad公司首次在世界半导体工业博览会展示了直线超声电机系列,如图2所示。该系列电机已经应用在Intel公司的计算机芯片制造工艺中。图3为东北工业大学高野刚浩(T.Takan)教授正在调试的直线型电机,无载荷速度达26 cm/s,位置分辩率为1μm。Phsikinstrumente公司研制出的直线超声电机如图4所示,PILine系列产品中一款电机输出推力可达1N,无负载最大速度可达800mm/s。2005年,南韩Hyun-Phill Ko etal研制了一种高速,高精度的用于半导体产业的直线超声电机如图5所示[18]。

图2 Anorad公司直线型超声电机系列

图3 高野刚浩(T.Takan)调试的直线型电机

图4 Phsikinstrumente公司研制的超声电机

图5 南韩Hyun-Phill Koetal研制的超声电机
2.2国内超声电机研究进展
国内许多单位,如南京航空航天大学、清华大学、浙江大学、东南大学、华中科技大学、吉林大学、哈尔滨工业大学、天津大学、电子部第21研究所等单位先后开展了这一研究工作。1997年清华大学研制出具有自校正功能的直线型超声电机[14~17],1998年南京航空航天大学超声电机研究中心研制的驻波大推力直线超声电机如图6所示[14~17]。1998年华中科技大学辜承林等研制了一种双π型压电超声波直线电机,如图7所示,该双π型压电超声波直线电机克服了单π型超声波直线电机的预应力的施加系统的结构复杂和加工难度大的问题,提出了双π型结构集振动体和移动体于一身,并由磁场提供预应力[14~17]。
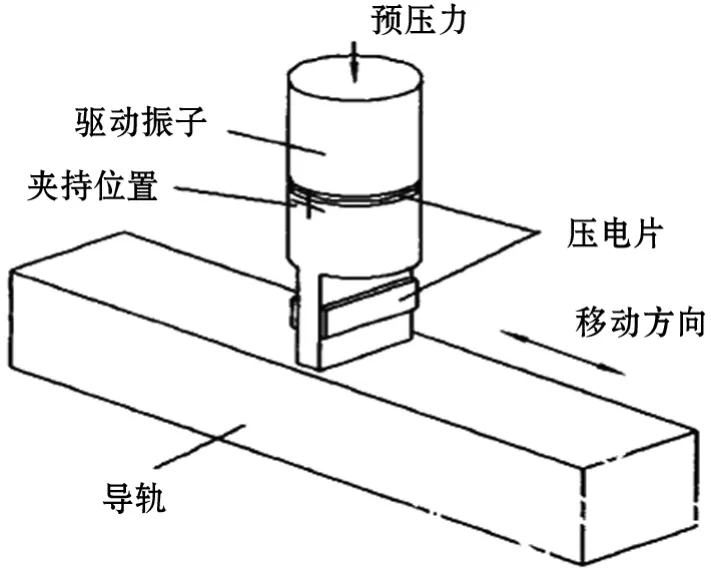
图6 南京航空航天大学复合振子型直线超声电机
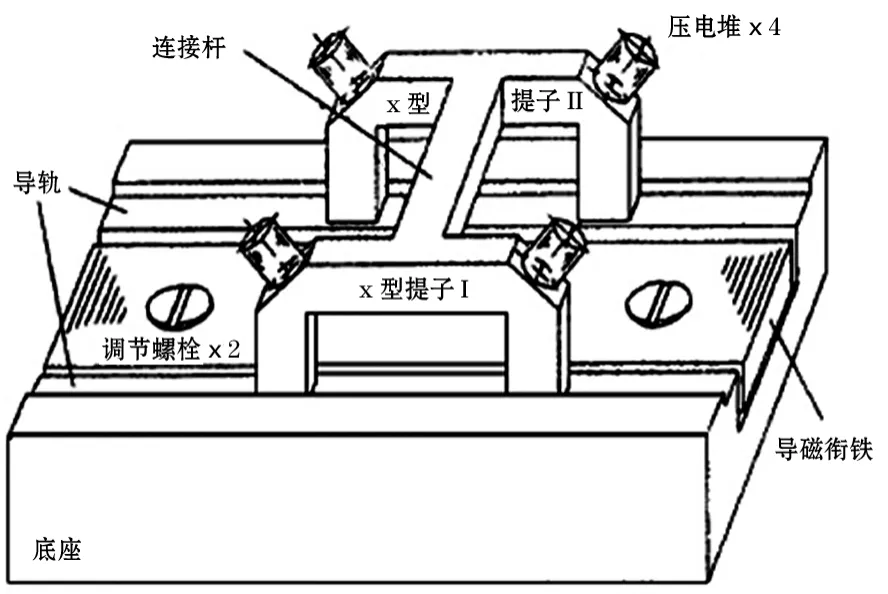
图7 华中科技大学双π型压电超声波直线电机
2005年,哈尔滨工业大学研制了一种利用超声换能器纵向振动模态的双向驱动直线超声电机,通过支架固定两个超声换能器呈V型,如图8所示,其中一个换能器工作可驱动动子单方向运行,当单独激励另一个振子时,动子反方向运行[19]。

图8 哈尔滨工业大学纵向振动模态直线超声电机
2007年,南京航空航天大学研制了一种双驱动足大推力直线超声电机如图9所示[14]。

图9 南京航空航天大学双驱动足直线超声电机
2003年-2009年华南农业大学先后研制出柱型复合振子和面内模态薄型直线超声电机和V型双棱柱振子直线超声电机如图10-11所示。

图10 华南农业大学柱型复合振子直线超声电机

图11 华南农业大学锥型复合振子直线超声电机
2.3存在的问题
虽然超声电机具有前述的诸多优点,但目前现有超声电机工作出现的死区、不可靠、效率低、位置分辨率稳定性差,预压力模型及电机由于自身宏动和谐振微动对位置分辨率的影响等问题未能很好解决,也很难实现真正的高位置分辨率和高可靠性,尚不足以用做IC产业和自动化工艺装备的高精度进给部件[20-25]。
3 新型宏微驱动直线电机
现有宏微驱动机构和直超声电机各有优势和不足,因此,结合宏微驱动机构和直线超声电机的优点,本文提出并设计了集宏微运动于一体的新型直线电机[26-27],实现宏微直线运动,将使传动系统结构简单、体积变小、分辨率和可靠性提高。
3.1结构设计与原理
实现宏微驱动的新型直线电机结构如图12~13所示,其中图12为宏微运动电机装配图,图13为复合振子结构示意图,复合振子两侧对称装有压电陶瓷片,极性相反配对组装。

图12 宏微运动电机装配图

图13 复合振子结构示意图
宏驱动时,分别对左右侧压电陶瓷通以正、余弦交流电,频率与复合振子谐振频率相同,以此同步激发复合振子的沿轴向的反向的对称振型和同向的反对称振型,如图14~15所示,二者振型合成,则在复合振子的拨齿与动子接触处产生椭圆运动轨迹,在一定预压力作用下,依靠拨齿与动子的动摩擦力,推动动子沿轴向直线宏运动。
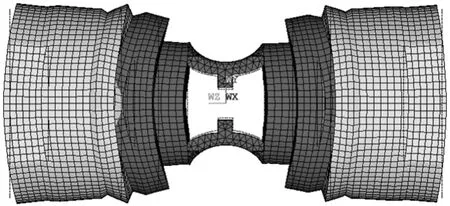
图14 宏运动复合振子反向振型
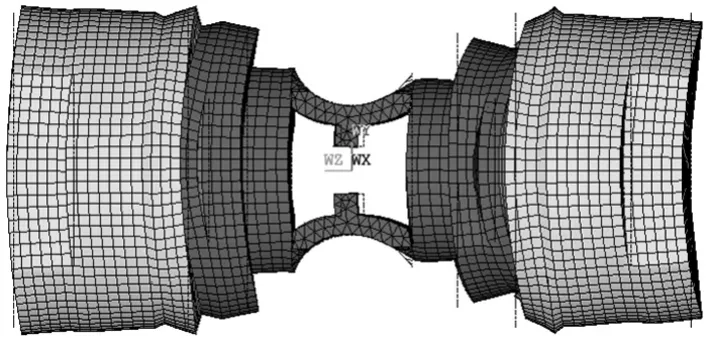
图15 宏运动复合振子同向振型
微驱动时,分别对左右侧压电陶瓷通以正、负直流电,以此同步驱动复合振子产生静态变形,在一定预压力作用下,依靠拨齿与动子的静摩擦力,夹持并带动动子沿轴向直线微运动。这样,在一个复合振子上,实现了大行程高速宏运动和高分辨率的精密微定位。

图16 微运动静态变形
3.2宏微驱动电源设计
新型直线电机高性能的获得,还要通过驱动控制系统的优化设计实现,所以设计适用于该类型电机的驱动控制系统显得非常迫切,采用高压集成运算放大器和三相逆变电路设计的一套驱动电路,可将宏微驱动控制系统集成在一个驱动控制系统中,采用可控整流和高频DC-DC二级电路实现0~1 000V直流电压连续可调,如图17所示[28]。

图17 宏微驱动电源框图
4 结论
大行程、高精度,同时易于小型化的移动机构是先进制造业等领域要解决的关键问题之一,为此本文对现有宏微双重驱动机构和直线超声电机的研究进展和存在问题进行了回顾,提出了一种宏微双重驱动新型直线压电电机,使其既能与超声电机一样,直接宏驱动,具有响应快、不受磁场干扰等特点;又能与微驱动相同,实现微驱动、精准定位,把宏微二种驱动集成在一个电机结构上,通过有限元模态计算分析了宏微驱动原理,同时,将宏微驱动控制系统也集成在一个控制器上,并给出了电源设计方案,前期的试验已证明了宏微二种驱动集成在一个电机上方案合理、可行,也是未来宏微双重驱动的一个发展方向。
[1]张强,卢泽生.宏/微结合双驱动进给控制系统的建模与仿真研究[J].机械传动,2006,30(4):16-19.
[2]王淑珍,常素萍,谢铁邦.大行程纳米级共平面二维精密工作台的研究[J].机械科学与技术,2010,29(8):981-985.
[3]陈洪涛,程光明,肖献强,等.宏/微双重驱动技术的研究和应用现状[J].机械设计与制造,2007(01):153-155.
[4]魏燕定,吕永桂,陈子辰.基于压电驱动器的微动台开环精密定位控制研究[J].机械工程学报,2004,40(12):81-85.
[5]孙立宁,董为,杜志江.宏/微双重驱动机器人系统的研究现状与关键技术[J].中国机械工程,2005,16(1):89-93.
[6]Rong-Fong Fung,Yi-Lung Hsu,Ming-Shyan Huang. System identification of a dual-stage XY precision posi⁃tioning table[J].Precision Engineering 2009(33):71-80.
[7]Yang Chuan,Zhao Qiang,Wang Hairong,et al.Study on intelligent control system of two-dimensional platform based on ultra-precision positioning and large range[J].Precision Engineering,2010(34):627-633.
[8]Chien-Hung Liu,Wen-Yuh Jywe,Yeau-Ren Jeng,et al.Design and control of a long-traveling nano-posi⁃tioning stage[J].Precision Engineering,2010(34):497-506.
[9]Yongrae Roh,Susung Lee,Wooseok Han.Design and fabrication of a new traveling wave-type ultrasonicmotor[J].Sensorsand Actuators,A 2001(94):205-210.
[10]Baonian Zhai,Siak-Piang Lim,Kwok-Hong Lee,et al.A modified ultrasonic linearmotor[J].Sensors and Actuators,2000(86):154-158.
[11]Yongrae Roh,Jaehwa Kwon.Development of a new standing wave type ultrasonic linear motor[J].Sen⁃sorsand Actuators,A 2004(112):196-202.
[12]Valentinas Snitka.Ultrasonic actuators for nanometre po⁃sitioning[J].Ultrasonics,2000(38):20-25.
[13]Faa-Jeng Lin,Rong-JongWai,Kuo-Kai Shyu et al. Recurrent Fuzzy Neural Network Control for Piezoelec⁃tric Ceramic Linear Ultrasonic Motor Drive[J].IEEE Transactions on Ultrasonics,Ferroelectrics,and Fre⁃quency Control,2001,48,(4):900-913.
[14]张建桃,张铁民.超声电机伺服控制技术研究进展[J].电机与控制学报,2009(6):879-885.
[15]许海,赵淳生.直线型超声电机的发展及应用[J].中国机械工程,2003,14(8):714-717.
[16]赵淳生.超声电机技术与应用[M].北京:科学出版社,2007.
[17]胡敏强,金龙,顾菊平.超声波电机原理与设计[M].北京:科学出版社,2005.
[18]Hyun-Phill Ko,et al.Optimization of a piezoelectric linearmotor in terms of the contact parameters.Materi⁃als Chemistry and Physics,2005(90):322-326.
[19]Fan Zhang,Weishan Chen,Junkao Liu,et al. Bidirectional Linear Ultrasonic Motor Using Longitudi⁃nal Vibrating Transducers[J].IEEE Transactions on Ultrasonics Ferroelectrics and Frequency Control,2005,52(1):134-138.
[20]Tobias Hemsel,JorgWallaschek.Survey of the present state of the artof piezoelectric linearmotors[J].Ultra⁃sonics,2000(38):37-40.
[21]Shin-Hee Jun,Sung-Mi Lee,Seung-Ho Lee,etal. Piezoelectric linear motor with unimorph structure by co-extrusion process[J].Sensors and Actuators A,2008(147):300-303.
[22]Lionel Petit,Paul Gonnard,A multilayer TWILA ul⁃trasonic motor[J].Sensors and Actuators A,2009(149):113-119.
[23]Faa-JengLin,Syuan-YiChen,Po-HuanChou,et al. Interval type-2 fuzzy neural network control for X–Y–Thetamotion control stage using linear ultrasonicmotors[J].Neurocomputing,2009(72):1138-1151.
[24]Y.Tomikawa,T.Takano,C.Kusakabe.Manabu Aoy⁃agi and Seiji Hirose,Development of Ultrasonic Mo⁃tors,9th Smart Actuator Symposium at ICATThe Penn⁃sylvania State University[C].1994(4):1-11.
[25]Byoung-Gook Loh,Paul I.Ro.An Object Transport System Using Flexural Ultrasonic Progressive Waves Generated by Two-Mode Excitation[J].IEEE Trans⁃actions on Ultrasonics,Ferroelectrics,and Frequen⁃cy Control,2000,47(4):994-999.
[26]Zhang Tiemin,Cao Fei,Li Shenghua,et al.FEM Analysis and Parameter Optimization of a Linear Piezo⁃electric Motor Macro Driven[J].Lecture Notes in Computer Science 2014,Part I,2014,8917:171-178.
[27]Zhang Tiemin,Cao Fei,Li Shenghua,et al.Finite element Study on the Cylindrical Linear Piezoelectric Motor Micro Driven[J].Lecture Notes in Computer Science 2014,Part I,2014,8917:179-186.
[28]张铁民,许志林,曹飞,等.宏微压电驱动器的电源设计与试验[J].压电与声光,2015,37(1):167-171.
(编辑:阮毅)
Study on a New Type of Linear Motor with Macro-Micro Dual Drive
ZHANG Tie-min
(South China AgriculturalUniversity,College of Engineering,Guangzhou510642,China)
Large stroke,high accuracy,easyminiaturization andmovingmechanism isone of the key problems to be solved in advanced manufacturing field,this paper reviews the research progress ofexistingmacro/micro dual drivemechanism and linear ultrasonicmotor and the existing problems,puts forward a kind ofmacromicro dual drive new linear piezoelectricmotor,themacro andmicromovement combine to make it the same as both the ultrasonic motor,direct-drive,fast response,from magnetic interference to achieve macro-driven;butwith the samemicro drive,precision positioning,to achievemicro drive,on amotorwhileachievingmacro andmicro drive,and through the finite element analysis software,calculate the vibration mode and the static deformation of composite vibrator,analyzes themacro and micro driving principle,presents the design ofmacromicro drivemodel of linearmotor driving power,as the macro/micro dualdrive foundation.
macro/micro dualdrive;linearmotor;ultrasonicmotor;micro drive
TP2
A
1009-9492(2015)06-0001-06
10.3969/j.issn.1009-9492.2015.06.001
*国家自然科学基金项目(编号:51177053);广东省科技创新重点项目(编号:2012CXZD0016);高等学校博士学科点专项科研基金项目(编号:20124404110003)资助
2015-04-21
张铁民,男,1961年生。华南农业大学工程学院教授。研究领域:微机电系统、机器人技术和智能检测与控制技术。
猜你喜欢
电子制作(2019年7期)2019-04-25
压电与声光(2019年1期)2019-02-22
铜仁学院学报(2018年6期)2018-07-05
数学物理学报(2018年1期)2018-03-26
广西电力(2016年5期)2016-07-10
电测与仪表(2016年18期)2016-04-11
湖州师范学院学报(2015年4期)2015-03-11
物理实验(2015年10期)2015-02-28
同位素(2014年2期)2014-04-16
振动、测试与诊断(2014年6期)2014-03-01
