
空对地精确攻击瞄准光电转塔系统设计
2015-11-24 05:26王昊鹏刘泽乾张会勇刘成亮李星宇
激光与红外 2015年6期
王昊鹏,刘泽乾,张会勇,刘成亮,李星宇
(1.海军航空工程学院 武器系统与运用工程系,山东 烟台 264000;2.空军航空大学 作战指挥系,吉林 长春 130022)
·光电技术与系统·
空对地精确攻击瞄准光电转塔系统设计
王昊鹏1,2,刘泽乾2,张会勇2,刘成亮2,李星宇2
(1.海军航空工程学院 武器系统与运用工程系,山东 烟台 264000;2.空军航空大学 作战指挥系,吉林 长春 130022)
某些现役轰炸机均未配备能够实现全天候精确轰炸的光电瞄准系统,其轰瞄设备为纯光学目视老设备,夜间及复杂气象条件下无法观测目标,不能完成精确轰炸。为实现空对地的全天候精确攻击瞄准,本文根据国内光电转塔技术研究现状,设计了集热像仪、可见光摄像机和激光测距机于一体,通过对作用距离和稳定精度的计算和仿真,确立了光学接口板、稳定平台及控制电子箱等分系统的设计方案,并对稳定精度进行了仿真测试及校验。结果表明,本文设计的光电转塔系统可以实现空对地全天候的精确攻击瞄准,能够满足夜间及复杂气象条件下观测目标的要求,可以在现役机型上得到实际应用。
光电转塔;光电瞄准;制冷红外摄像机;非制冷红外摄像机;可见光摄像机
1 引 言
光电瞄准系统正在取代传统型光学瞄准系统,成为实现全天候精确轰炸的新一代瞄准系统。而我国光电瞄准技术起步较晚,尤其在轰炸作战领域的应用,现役主站轰炸机均未配备光电瞄准系统,其轰瞄设备为纯光学目视老设备。这些设备技术落后、重量大、操作繁琐,显然已经无法满足当今信息化作战要求,主要是表现在目标截获难、轰炸精度低、载机生产能力弱三个方面。为现役主战轰炸机加装光电瞄准系统,对于提高飞机夜间训练、作战能力具有一定的理论及实践指导意义,能够为充分发挥常规航空炸弹及激光制导炸弹作战性能打下坚实基础[1-5]。
轰炸瞄准中,可见光、红外摄像机将目标视频信号传送到视频跟踪器对目标进行全天候搜索、跟踪,视频跟踪器将目标图像信息传送到载机显控系统(指挥仪)实时显示,激光测距/指示器将测得的目标三维位置数据输出到伺服控制器和主控计算机,伺服控制器对目标三维位置数据取差信号功率放大,控制伺服电机对目标进行连续地角跟踪,激光测距/指示器同步指示目标,引导激光制导炸弹轰炸目标,原理及瞄准过程同其他机型上激光制导炸弹[6-10]。设计三光集成的机载光电转塔系统是本文研究的主要内容。
光电转塔系统是一种应用了陀螺稳定技术的光学设备,通常集成了红外摄像机、可见光摄像机和激光测距机等多种光学传感器,具有隔离载体运动保持瞄准线稳定的功能。以某型主战轰炸机为平台设计的光电转塔系统外形示意如图1所示。

图1 光电转塔系统外形示意图
光电转塔的外形尺寸和安装接口如图2所示。

图2 光电转塔外形尺寸和安装接口
控制电子箱的外形尺寸和安装接口如图3所示。
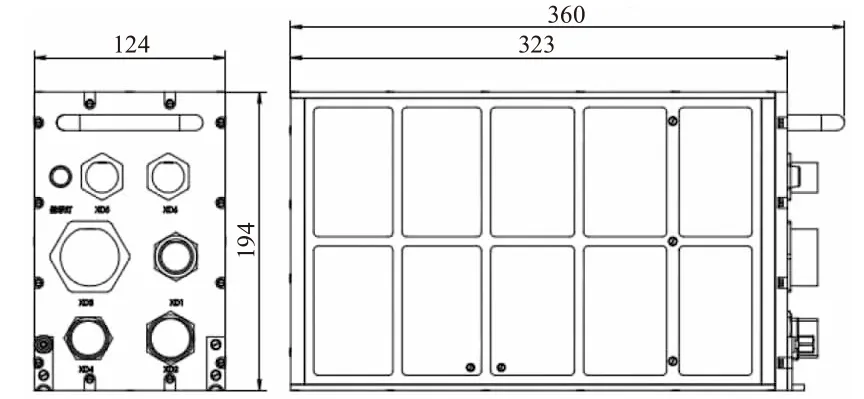
图3 控制电子箱外形尺寸和安装接口
减振托架的外形尺寸和安装接口如图4所示。

图4 减振托架外形尺寸和安装接口
2 总体方案
2.1 系统组成
依据轰炸光电瞄准系统指标要求,光电转塔系统由两部分组成:光电转塔和控制电子箱。光电转塔以稳定平台为基础,集成了制冷红外摄像机、非制冷红外摄像机、可见光摄像机、激光测距机和光学接口板;控制电路则置于箱体内,包括了视频处理板、通讯/伺服控制板和电源处理板,箱体通过减振托架与载体连接。
光电转塔总体为四轴双框架结构,内置多种光学探测器,形成一个一体化的光电设备,如图5所示。为了伺服控制需要,在光电转塔内还包括陀螺、旋转变压器、电机等组件。

图5 光电转塔分解示意图
控制电子箱为光电转塔的控制设备。其中箱体为视频处理板、通讯/伺服控制板和电源处理板承载机构及提供物理防护和导热装置;视频处理板根据成像系统传来的图像,计算出目标相对光轴的偏差,并将偏差计算结果输出给通讯/伺服控制板以控制转塔将瞄准线指向目标,还具有字符叠加的功能;通讯伺服控制板完成转塔相对于惯性空间运动的速度采样和角位置采样,根据控制指令运行相应的控制算法,以控制稳定平台电机,实现稳定平台的各种运动,包括手动跟踪、保持、回零等;电源处理板完成对输入电源的滤波及稳压,提高系统的电磁兼容性能及为系统内其他设备提供稳压电源。
2.2 系统电气连接关系
根据上述对系统工作模式的分析,结合两种工作模式下的数据流,并综合考虑系统各部分的供电状况,光电转塔系统的电气系统连接关系,如图6所示。

图6 电气系统连接关系
2.3 作用距离关键指标校核
(1)红外摄像机
(a)按几何分辨率计算
在标准能见度条件下(环境温度25 ℃,相对湿度80%,能见度大于23.5 km),如果目标的几何尺寸为H×W,按约翰逊准则,探测或识别至少需要nH×nw像素2,则成像距离R的计算公式为:
其中,δ为角分辨率。对应本方案中的制冷红外摄像机,其小视场的视场角为1.83°×1.47°(水平×垂直),探测器的像元数为320×256,则角分辨率为0.1 mrad。
当识别和探测概率为50%时,根据约翰逊准则,探测对应的nH×nw=2×2像素2,识别对应的nH×nw=8×8像素2。当识别和探测概率为95%时,需要再乘以TTPF因子2,则探测对应的nH×nw=4×4像素2,识别对应的nH×nw=16×16像素2。
(b)按NETD计算
红外探测器以温度定义的信噪比(SNR)为:
其中,NETD是所选择的红外热像仪的等效噪声温度差,本方案中的制冷红外摄像机,其NETD为35 mK。ΔTR是目标与背景温差ΔT经过距离R之后到达探测器的温差,其值为:
ΔTR=ΔTe-αR
此处α为红外的衰减系数,在标准能见度条件下(环境温度25 ℃,相对湿度80%,能见度大于23.5 km),α=0.07。不同目标与背景之间的温差ΔT一般不同,舰船与背景之间的温差为2 K,人、车辆、飞机、导弹等目标与背景之间的温差均大于5 K。为简化计算,取ΔT为2 K和5 K分别进行计算。综合上述两个公式,可以推导出:
另外,一般来说,SNR=2.8可以保证50%的探测概率,SNR=4.1可以保证95%的探测概率以及对目标的可靠跟踪。
(2)可见光摄像机
在标准能见度条件下(环境温度25 ℃,相对湿度80%,能见度大于23.5 km),如果目标的几何尺寸为H×W,按约翰逊准则,探测或识别至少需要nH×nw像素2,则成像距离R的计算公式为:
其中,δ为角分辨率。对应本方案中的可见光摄像机,其小视场的视场角为1.83°×1.37°(水平×垂直),探测器的像元数为752×582,则角分辨率为0.04 mrad。
由于可见光摄像机无法像红外摄像机一样通过热量来辅助识别目标,所以对于同样的探测和识别概率,可见光摄像机需要更多的像素。当识别和探测概率为50%时,根据约翰逊准则,探测对应的nH×nw=4×4像素2,识别对应的nH×nw=16×16像素2。当识别和探测概率为95%时,需要再乘以TTPF因子2,则探测对应的nH×nw=8×8像素2,识别对应的nH×nw=32×32像素2。
3 分系统方案
3.1 光学接口板方案
光学接口板组成包括三个模块:通讯模块、视频信号转换模块。通讯模块的控制由DSP处理器实现,视频信号转换模块由模拟转换芯片搭建。
(1)通讯模块
通讯模块用于连接三个光学传感器的通讯接口以及对通讯/伺服控制板的通讯接口。
通讯模块主要负责接收通讯/伺服控制板发送的控制指令,解析后将控制指令发送到相对应的光学传感器。同时,通讯模块要接收三个光学传感器返回的状态信息,将这些信息全部打包以后,通过通讯接口向通讯/伺服控制板发送。通讯模块对三个光学传感器的通讯接口为RS422串口。
(2)视频信号转换模块
从可见光摄像机和红外摄像机输出的电视视频信号是普通模拟电视信号,在长距离传输过程中容易衰减,而且在复杂的电磁环境下也容易受干扰。为了提高视频信号的传输距离,以及提高视频信号的抗干扰能力,在光学接口板上将红外和可见光摄像机视频信号转成差分模拟视频信号进行传输。光学接口板连接关系,如图7所示。

图7 光学接口板连接关系图
3.2 稳定平台密封性设计方案
稳定平台结构组件是用来承接各光学探测器及伺服执行组件,起到将光电转塔连接为一个整体的功能。
为了提高环境适应性,稳定平台在进行结构设计时充分考虑了密封性能和防腐蚀性能。稳定平台的所有连接部位均设计了密封槽用以安放密封胶绳,如图8所示;轴系部分采用了迷宫式密封设计,通过在迷宫式沟槽内加入油脂,可以有效地防水,如图9所示。上述密封形式已经通过多种定型产品的相关环境试验检测,效果良好。外用防护漆采用专用氟聚氨酯半光磁漆,耐湿热,耐盐雾,耐霉菌。
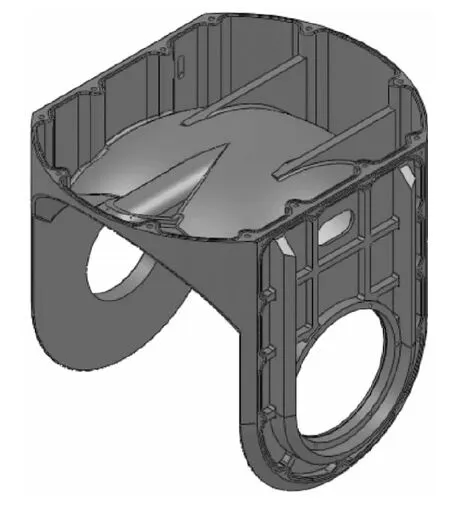
图8 连接部位的密封槽设计图
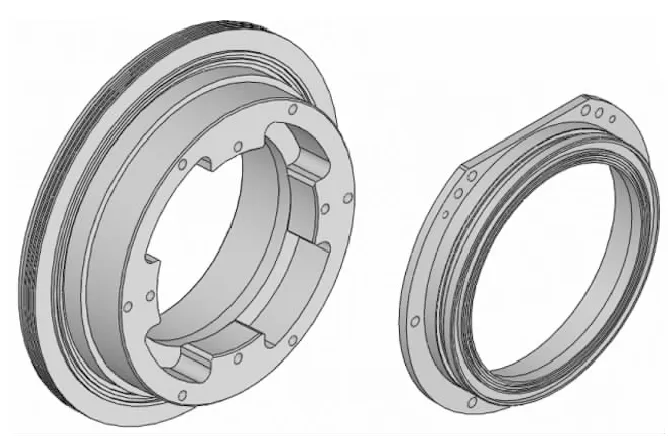
图9 轴系部分采用迷宫式密封
此外,在外环轴系还采用了特殊的动密封圈,由不锈钢弹簧与聚四氟乙烯组合而成。PTFE板弹簧组合U型密封圈由适当的弹簧张力加上系统流体压力,将密封唇顶出而轻轻压住被密封的金属面以形成非常优异的密封效果。其结构如图10所示。

图10 动密封圈示意图
3.3 控制电子箱
(1)箱体设计
控制电子箱箱体结构按照GJB441中的标准1/2ATR机箱设计,电子箱中共5个印制板插槽,电路板为6U标准尺寸,电路板上设计有锁紧机构和起拔器,并针对质量较大的模块进行了加固;电源板设计有全铝外壳用于加固和散热。
控制电子箱可按GJB779配置减振托架及快拆结构,或按用户要求安装。
控制电子箱外形如图11所示。
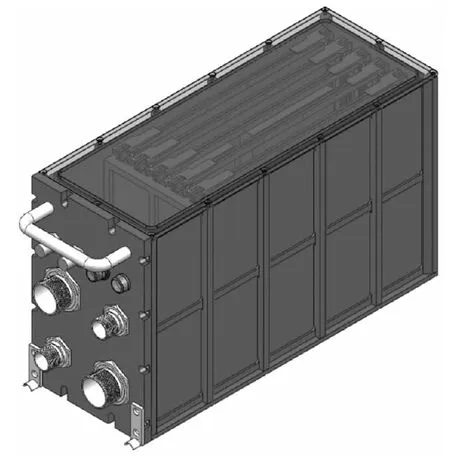
图11 控制电子箱外形图
(2)视频跟踪设计
视频跟踪器接收红外或可见光数字视频,实现图像预处理、目标识别、目标捕获、目标跟踪等功能,生成并输出误差信号。跟踪器内置了质心跟踪算法和相关跟踪算法,能够跟踪小目标及面目标。
跟踪器工作过程分为两个阶段:搜索阶段和跟踪阶段。在搜索阶段具有两种工作方式:①接收外部指令手动搜索目标,找到目标后采用中心截获方式捕获目标。②处于自动捕获模式时对视频进行图像分割,通过目标识别获得一些感兴趣区域,然后根据预设的目标选择策略自动捕获目标。跟踪器在捕获目标后设置跟踪波门,自动转入跟踪阶段。
在目标跟踪阶段根据目标本身特征情况分为两种跟踪模式:随着目标距离由远变近,目标在图像上呈现为由点目标到面目标的变化。在远距离处,目标像点很小,可以提取的目标特征少,因此只能采用质心跟踪模式;当距离逐渐变小时,目标图像特征逐渐明晰,这时可以考虑相关跟踪模式。
跟踪器默认进入手动搜索模式,可以接收外部指令切换到自动搜索模式。在跟踪阶段还可以接收外部指令修改瞄准点,修改瞄准点后以中心截获方式重新捕获目标,同时跟踪窗口尺寸可以根据外部指令进行人工调整。在目标被遮挡时跟踪器转入记忆跟踪,当目标以直线方式运动时,跟踪器能够在目标再次出现时重新捕获目标。
目标跟踪器的工作流程图如图12所示。
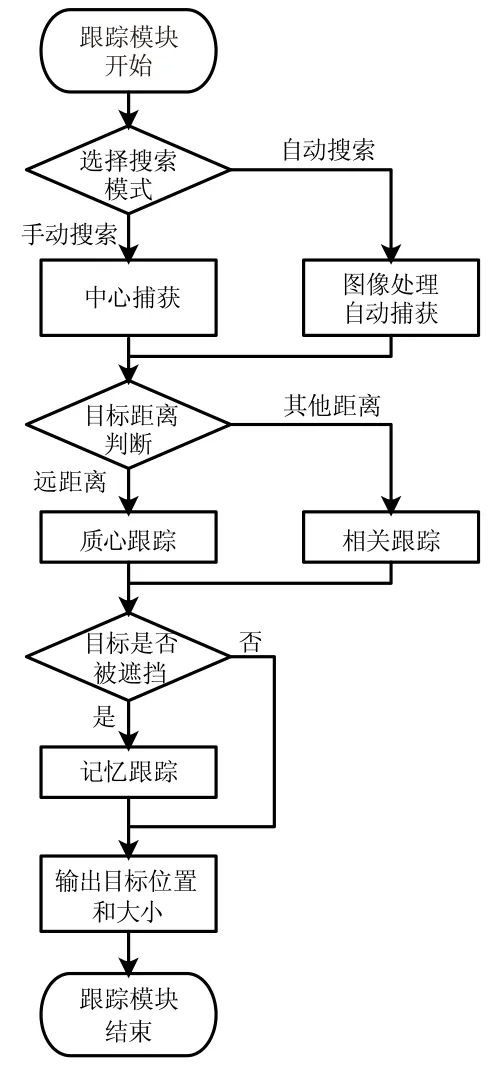
图12 目标跟踪器工作流程图
(3)通讯/伺服控制板
通讯/伺服控制板包括通讯控制模块和伺服控制模块。通讯/伺服控制板包括通讯控制模块和伺服控制模块。
伺服控制板连接关系框图如图13所示。
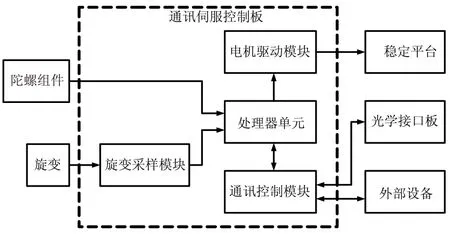
图13 伺服控制板连接关系图
伺服控制板的设计内容除了硬件设计外还包括伺服控制软件设计。伺服控制软件以事件为任务驱动,使用状态转换的方式响应分系统的操作和动作,能够有效地满足分系统在伺服控制操作方面的实时性需求。
4 稳定精度
稳定精度是衡量系统稳定回路的核心指标。稳定回路实现的是速率稳定,其原理是:由于外来干扰力矩的作用,使得稳定平台相对惯性空间产生了运动。稳定平台上的速率陀螺测出该相对角速度,经放大、校正后驱动稳定平台上的电机,电机输出力矩以抵抗干扰力矩直至稳定平台相对惯性空间的角速度为零。稳定回路的组成如图14所示。

图14 稳定回路组成
瞄准线稳定精度的性能指标要求为[11]:
方位:≤0.02 mrad(1δ)(1°/2 Hz、2°/1 Hz扰动条件下);
俯仰:≤0.02 mrad(1δ)(1°/2 Hz、2°/1 Hz扰动条件下);
本方案对于稳定精度的校核主要通过软件仿真和系统实际测量相结合的方法来进行。仿真工具使用Matlab,实践证明其仿真结果与实测结果偏差较小,稳定回路的仿真界面如图15所示。

图15 稳定回路仿真
通过仿真得到的稳定精度测试数据如图16所示。
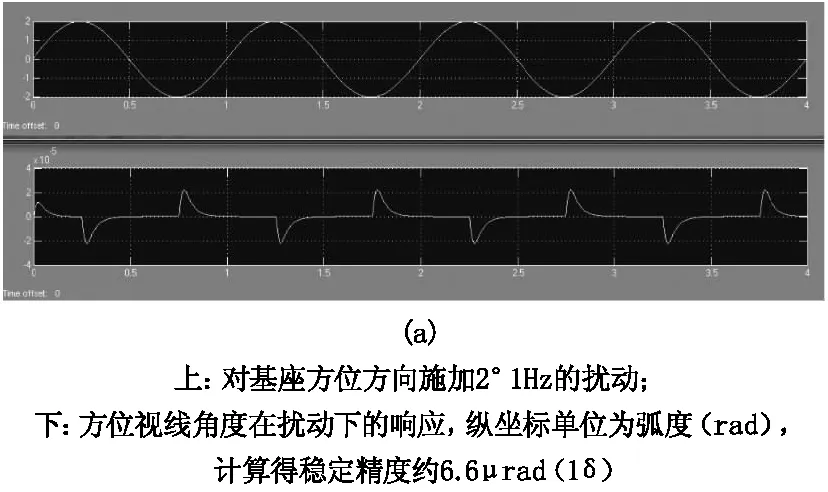
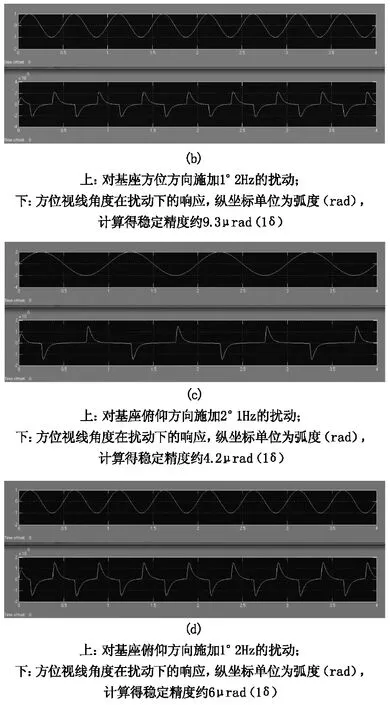
图16 稳定精度测试数据
由仿真计算结果可见,在给定的扰动下,方位、俯仰方向稳定精度均在20 μrad(1δ)之内,满足指标要求。
5 结 论
为解决轰炸机光电瞄准系统的实现难题,本文就三光集成的光电转塔系统设计难点展开研究,建立总体设计方案,实现了关键指标校验和稳定精度仿真,从而为系统实现奠定了基础。在空对地精确攻击瞄准技术的基础上,充分利用光电探测设备特点,紧密结合载机武器系统结构,模拟了轰炸光电瞄准过程,通过对系统稳定精度的仿真验证系统操作的可行性。结果表明,模型能够稳定解算瞄准诸元,控制飞控、预告、投弹指令输出,主控计算机工作稳定、通信正常,前舱执行单元调理信号正确,能够满足轰炸光电瞄准系统的指标要求,可以在某型主战轰炸机上实现应用。
[1] WANG Dapeng,FAN Huilin,HOU Manyi,et al.Status and development of bombing electro-optic targeting system[J].Laser & Infrared,2013,43(9):977-981.(in Chinese)
王大鹏,范惠林,侯满义,等.轰炸光电瞄准系统现状与发展[J].激光与红外,2013,43(9):977-981.
[2] FU Xiaoning,NIU Jianjun,CHEN Jing.Photoelectric detection technology and system[M].Beijing:Electronic Industry Press,2010:224.(in Chinese)
付小宁,牛建军,陈靖.光电探测技术与系统[M].北京:电子工业出版社,2010:224.
[3] Maj Merrick,E Krause.Night air combat-a united states military-technical revolution[D].Air Command and Staff College,1997:6.
[4] WANG Xiaopeng.Introduction to military photoelectric technology and system[M].Beijing:National Defence Industry Press,2011:44.(in Chinese)
王小鹏.军用光电技术与系统概论[M].北京:国防工业出版社,2011:44.
[5] WANG Guohua,MAO Dapeng,LIU Xun,et al.Study of search strategy on airborne optical tracking system[J].Laser & Infrared,2011,41(9):1014-1018.(in Chinese)
王国华,毛大鹏,刘洵,等.机载光电跟踪系统搜索策略研究[J].激光与红外,2011,41(9):1014-1018.
[6] LI Jiangyong.New ideas of the development of airborne photoelectric intelligence reconnaissance system[J].Laser & Infrared,2013,43(11):1199-1202.(in Chinese)
李江勇.机载光电情报侦察系统发展新思路[J].激光与红外,2013,43(11):1199-1202.
[7] YU Pinyi,ZHANG Pingxin,HU Leili,et al.Design and application of airborne electro-optical detection system performance quantificational IR drone[J].Laser & Infrared,2012,42(6):651-654.(in Chinese)
郁品一,张平鑫,胡磊力,等.机载光电探测系统红外性能测试靶板的研究[J].激光与红外,2012,42(6):651-654.
[8] ZHANG Ning,SHEN Xiangheng,SONG Ying.Tracking error analyzing model of dual-band airborne optoelectronic platform[J].Laser & Infrared,2012,42(7):786-789.(in Chinese)
张宁,沈湘衡,宋莹.双波段机载光电平台跟踪精度检测装置分析[J].激光与红外,2012,42(7):786-789.
[9] George M.Siouris.Missile guidance and control systems[M].New York:Springer-Verlag Press,2004:224.
[10]HUANG Zhili,LI Bo,LI Qi.Modern photoelectric aiming system[J].OME Information,2011,28(3):58-64.(in Chinese)
黄志立,李波,李奇.现代光电瞄准系统[J].光机电信息.2011,28(3):58-64.
[11]YUE Hongyu,LI Chaorong,LI Yong,et al.Reliability design and simulation test for the optic-electronic products[J].Laser & Infrared,2013,43(3):291-296.(in Chinese)
乐洪宇,李朝荣,李永,等.光电产品的可靠性设计与仿真试验[J].激光与红外,2013,43(3):291-296.
Design of electro-optical turret for air-to-ground precision attack targeting
WANG Hao-peng1,2,LIU Ze-qian2,ZHANG Hui-yong2,LIU Cheng-liang2,LI Xing-yu2
(1.Weapon Systems and Utilization Engineering,Naval Aviation Engineering Institute,Yantai 264000,China;2.Campaign and Command Department,Aviation University of Air Force,Changchun 130022,China)
Domestic bombers have not been equipped with the electro-optical targeting system(EOTS),that makes them not be able to observe targets at night,and precise bombing cannot be realized as the current bombing targeting systems are the all-optic targeting systems,so the EOTS is needed.According to the technology status of domestic electro-optical turret,a turret system that integrates thermal imager,visible light camera and laser rangefinder was designed for achieving all-weather air-to-ground precision attack.Through the calculation and simulation of operating range and stable precision,a design scheme of the optical interface board,stable platform and electronic control box uniform system was established,and simulation test and verification of stable precision have been done.Results show that precise air-to-ground all-weather attack targeting can be realized by the designed electro-optical turret system at night and complex weather conditions,which can get practical application in domestic bombers.
electro-optic turret;electro-optical targeting;refrigeration infrared camera;uncooled infrared camera;visible light camera
1001-5078(2015)06-0656-07
军队重点科研项目(No.KJ05138)资助。
王昊鹏(1987-),男,博士研究生,主要研究工作是武器系统建模与仿真。E-mail:roc_whp@sina.com
2014-08-13;
2014-09-17
TJ760
A
10.3969/j.issn.1001-5078.2015.06.012
猜你喜欢
太阳能(2022年3期)2022-03-29
激光与红外(2021年3期)2021-04-07
橡塑技术与装备(2021年5期)2021-03-16
造船技术(2020年2期)2020-05-18
太阳能(2020年3期)2020-04-08
当代工人·精品C(2019年2期)2019-05-10
电子制作(2019年23期)2019-02-23
计算机应用与软件(2017年7期)2017-08-12
工业设计(2016年7期)2016-05-04
火控雷达技术(2016年2期)2016-02-06
