FAST馈源舱精调机构位姿测量系统性能分析
2015-12-12 01:47詹银虎张中凯
测绘通报 2015年2期
詹银虎,郑 勇,张 超,张中凯
(信息工程大学导航与空天目标工程学院,河南郑州450052)
一、引 言
FAST(five hundred meter aperture spherical radio telescope)是500 m口径球面射电望远镜的简称,是中国贵州省正在建设的世界上最大的单口径射电望远镜[1]。馈源舱是FAST工程的核心部件之一,在天文观测运行中,馈源舱由6根钢索概略拖动至反射面焦点,再通过精调机构微调,实现馈源高精度的定位和指向跟踪(如图1所示)。FAST馈源测量系统的一项艰巨任务是:在500 m跨度的钢索结构上,对馈源舱精调机构的实时动态定位精度达到4 mm,定姿精度达到1°,并将测量结果实时反馈给控制系统,实现闭环控制[2]。
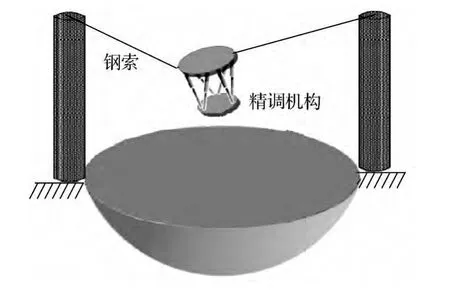
图1 馈源舱、精调机构简图
由于激光跟踪仪测程有限,摄影测量易受外界环境干扰且动态识别实时处理困难,GPS动态测量精度较低,目前提出的精调机构位姿测量方案中,主要考虑全站仪测量系统[3]。该系统由位于反射面内测量基准点上的全站仪、位于精调机构下平台边缘的目标棱镜、测量控制及数据处理系统、供电通信线路等组成。在测量实施时,由测量控制系统控制全站仪照准对应的目标棱镜进行测量,获得动态测量数据,并由数据传输线传给数据处理系统,通过全站仪动态测量数据处理软件实时处理获得棱镜的点位坐标。本文介绍了全站仪测量系统的组成和测量方案,着重对系统的测量条件进行了计算和分析,并通过仿真测量,分析了系统所能达到的定位和定姿精度,以及系统的可靠性。
二、测量系统组成及测量方案
1.测量基准网
如图2所示,中性反射面的口径约为500 m,测量基准网由均匀分布于反射面内的24个基准点(JD-0~JD-23)组成,目前基准点的点位坐标已经固化。其中,JD-0~JD-5位于反射面底部中心的正五边形顶点和中心;JD-6~JD-11近似均匀分布在水平半径约110 m的圆周上;JD-12~JD-23近似均匀分布在水平半径约210 m的圆周上,但个别基准点的位置有所调整。如JD-15的位置已调整至反射面的边沿,其距离反射面中心的水平距离约为250 m,是较为特殊的一个控制点。
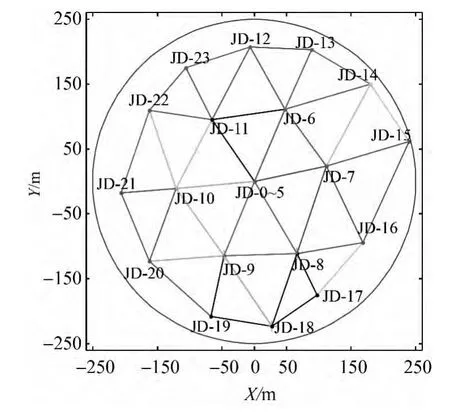
图2 测量基准网的平面布设图
2.全站仪
如图3所示,用于精调机构位姿测量的全站仪共有9台,分别安置在JD-13~JD-15、JD-17~JD-19、JD-21~JD-23的9个基准点上。在测量实施时,由测量控制系统控制全站仪照准对应的目标棱镜进行测量,获得实时动态测量的距离和角度数据,并由数据传输线传给数据处理系统。
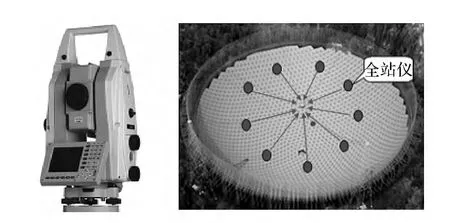
图3 全站仪测量系统示意图
3.目标棱镜
如图4所示,用于精调机构位姿测量的目标棱镜共有9个,分别安置在精调机构下平台边缘的9条棱上。为了提高测量精度,目标棱镜将采用高精度的角锥棱镜。
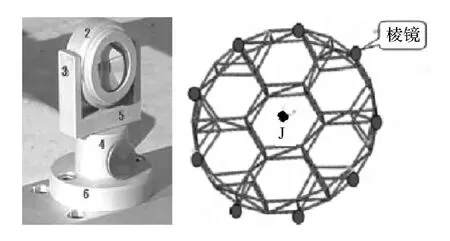
图4 目标棱镜示意图
由于棱镜跟随精调机构的最大运动速度为11.6 mm/s,全站仪进行动态跟踪测量时,必须解决时间同步的问题。目前,卫星授时、计算机守时技术比较成熟,且全站仪测量时滞的检定精度可达0.02 s,可满足 FAST 对时间同步精度的要求[4]。
4.测量流程
1)由测量控制系统向全站仪发送各种工作指令。
2)全站仪按照动态测量模式运行,一台全站仪跟踪一个事先确定的棱镜,进行距离和角度测量,连续获得棱镜中心的距离和水平角、垂直角观测量,并发送给数据处理系统。
3)数据处理系统对每台全站仪的测量数据进行实时处理,获得每个棱镜的瞬时位置,进而由9个棱镜的位置计算出精调机构的瞬时位置、姿态和对应的时间等信息,并发送给全站仪测量控制系统。
4)全站仪测量控制系统将数据处理结果发送给测量总控系统。
三、系统测量条件计算和分析
系统测量条件主要有棱镜入射角、全站仪观测距离和观测高度角。棱镜入射角与棱镜面的法向指向有关,观测距离和观测高度角与棱镜的空间位置有关。而在FAST运行过程中,棱镜将跟随精调机构做整体运动。因此,系统的测量条件由精调机构的空间位置和姿态间接决定。
1.精调机构的空间位置和姿态
如图5所示,球形反射面的口径约为500 m,测量坐标系原点O位于反射面的球心,Z轴指向天顶,X轴指向东,Y轴与X、Z轴构成右手系。阴影部分表示有效照明口径内的反射面,呈瞬时抛物面型,Or为抛物面顶点,O为中性反射面的球心[5]。则在理想状况下,精调机构通过一次索驱动的粗略调整,以及自身的精确微调,可以使其中心J到达抛物面的焦点Of,指向为z=OrO。当反射面的有效照明口径不断变换时,馈源精调机构的位置不断变化,其运动范围构成一球冠轨迹。该球冠轨迹半径r≈162.9 m,最高点H距离O点的水平极距约为100 m,即从Z轴方向看精调机构,其平面运动范围约为半径100 m的圆。
2.棱镜的位置和指向
如图5所示,设馈源位于球冠轨迹的底部中心L时,某棱镜Pi在测量坐标系下的位置为pi,棱镜面的法向(即棱镜的指向)为ni。由于精调机构在6根钢索的牵引下运动时,自旋运动较小,对棱镜入射角、观测距离和观测高度角的统计影响可以忽略,因此,精调机构中心由L点运动到Of点的过程,可等效简化为2个步骤:①精调机构沿方向由L点平移至Of点;②精调机构在Of点,以a=z×Z为轴旋转θ[6]。则Of点的棱镜的位置矢量p'i和指向ni'可表示为
Z=[0 0 1]T,即测量坐标系Z轴方向的单位矢量。式(1)和式(2)中的Ra为绕a轴的旋转矩阵,关于Ra的求解,国内外诸多学者进行了广泛而深入的研究,求解方法基本可归纳为四元数法、旋转矩阵法、欧拉角法[7-10]。本文采用的是文献[10]的方法。
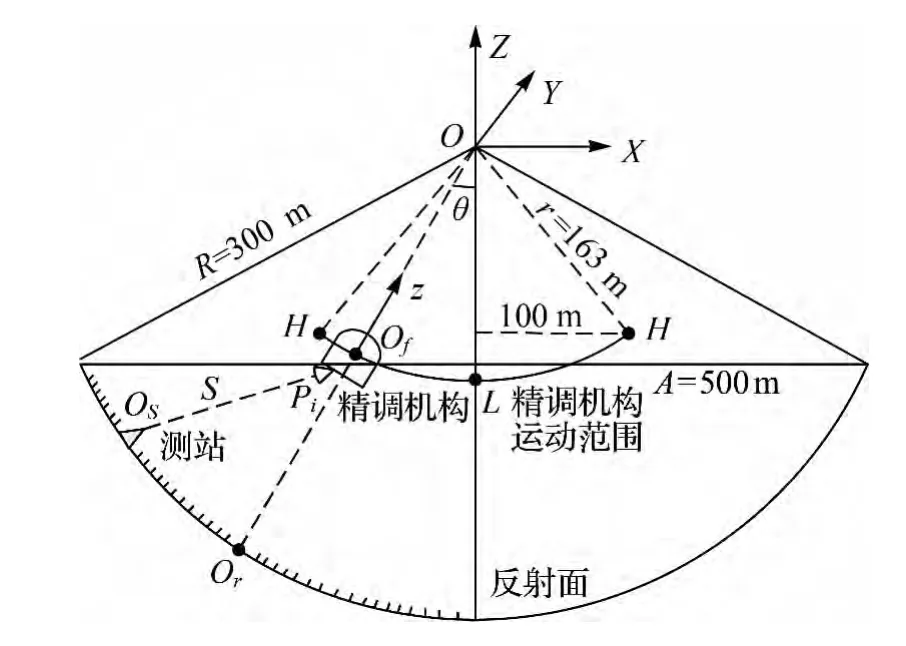
图5 精调机构的空间位姿
3.测量条件的计算方法
如图5所示,由测站Os观测精调机构上的某棱镜Pi。用S表示观测矢量,则

式(3)中Os为测站点的坐标,为已知值。棱镜入射角α、观测距离d,以及观测高度角h可表示为
四、系统测量条件计算和分析
考虑到反射面内最外围控制网的12个测站具有一定的对称性,且精调机构的运动范围也具有对称性,因此只需要挑选具有代表性的测站统计棱镜入射角、观测距离和观测高度角即可。下面挑选了JD-15和JD-21两个基墩,JD-15的位置靠近反射面的边沿,位置较为特殊;JD-21距离反射面中心的水平距离约为210 m,同其他控制点的位置基本一致,具有代表性。
1.棱镜入射角
图6是以JD-15测站为例,计算测站与对应的观测棱镜之间的入射角。图中用颜色表示入射角的大小。
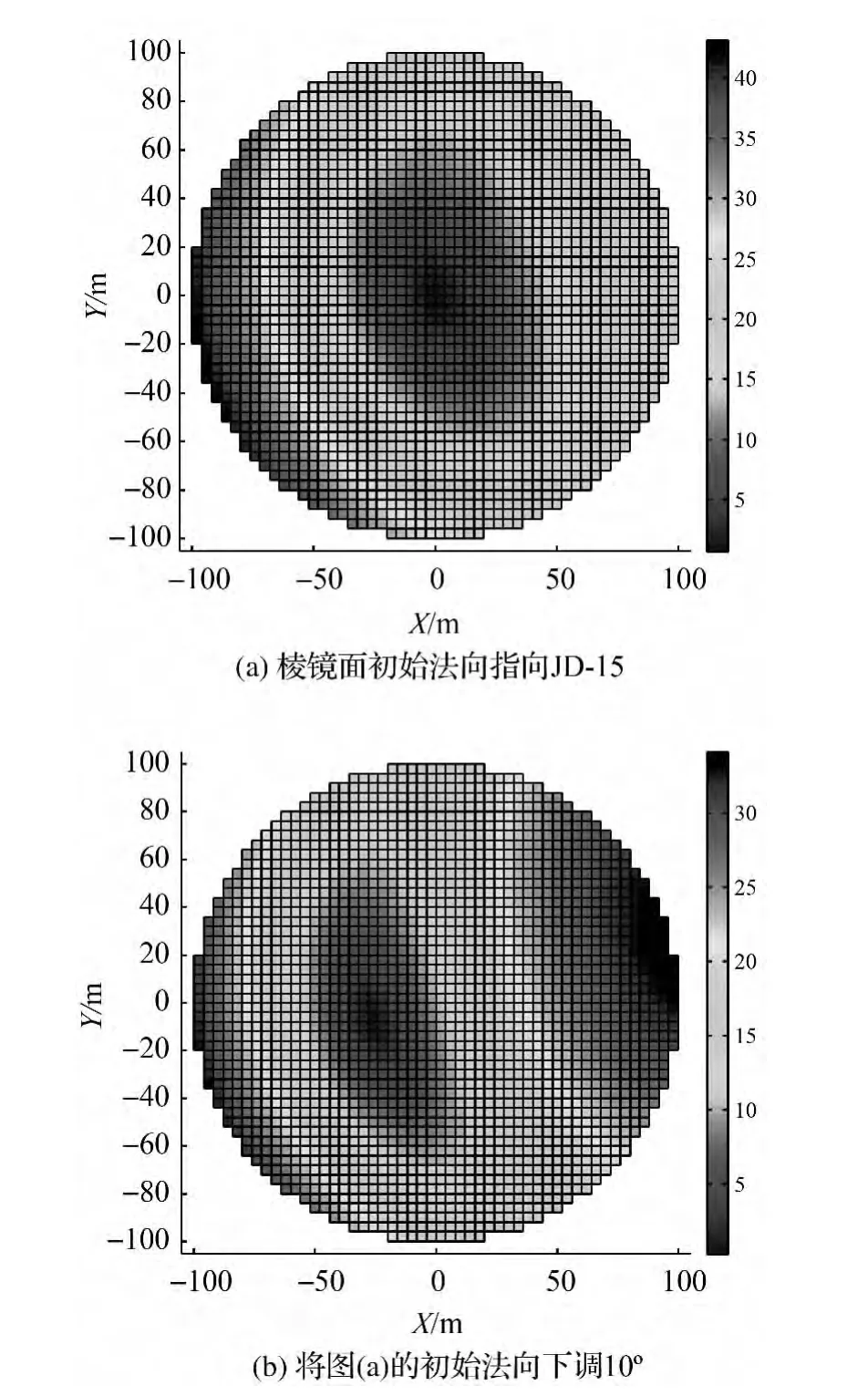
图6 棱镜初始指向与全局入射角的关系
定义精调机构位于L点时的棱镜面法向为初始法向,图6(a)是棱镜的初始法向指向测站时,全局范围内的棱镜入射角统计情况。其中入射角最大值小于 45°,平均值为 19.0°;图 6(b)是在图 6(a)的基础上将棱镜面的初始法向向下调整10°之后,全局范围内的棱镜入射角统计情况。其中入射角最大值约为35°,平均值为18°。显然,棱镜面的初始法向下调整大约10°后,棱镜入射角得到了全局改善。对于不同的测站,若要保证相应观测棱镜的入射角全局最优,需要对棱镜的初始法向进行不同幅度的调整。经过对每个测站的计算分析,表1给出了9个测站的棱镜入射角最优统计结果。
文献[11—12]研究指出,利用棱镜进行激光测距时,棱镜的有效反射面积随入射角增大而减小,进而影响测距精度。当入射角达到35°时,激光测距误差约为0.05 mm;而入射角在20°以内时,测距误差小于0.01 mm;入射角在15°以内时,测量精度最高,稳定性最好。因此,相对于精调机构4 mm的定位精度要求,因棱镜入射角产生的测距误差可以忽略。文献[13]研究了棱镜入射角对测角精度的影响,并通过试验给出了经验改正公式,改正后的测量点位坐标误差小于1 mm。

表1 棱镜入射角统计(°)
对于单个棱镜而言,因棱镜入射角偏大可能引入系统性的定位误差;但对9个棱镜而言,这一系统误差可能呈现一定的随机性,可通过最小二乘法等数据处理方法予以减弱。
2.观测距离
图7、图8显示了JD-15测站和JD-21测站的测距变化范围。JD-15测站的测距变化范围约为150~350 m,JD-21测站的测距变化范围约为140~320 m。全站仪动态测距精度约为2 mm+1×10-6D,因此可以估算测距精度的变化范围约为2.1~2.4 mm。
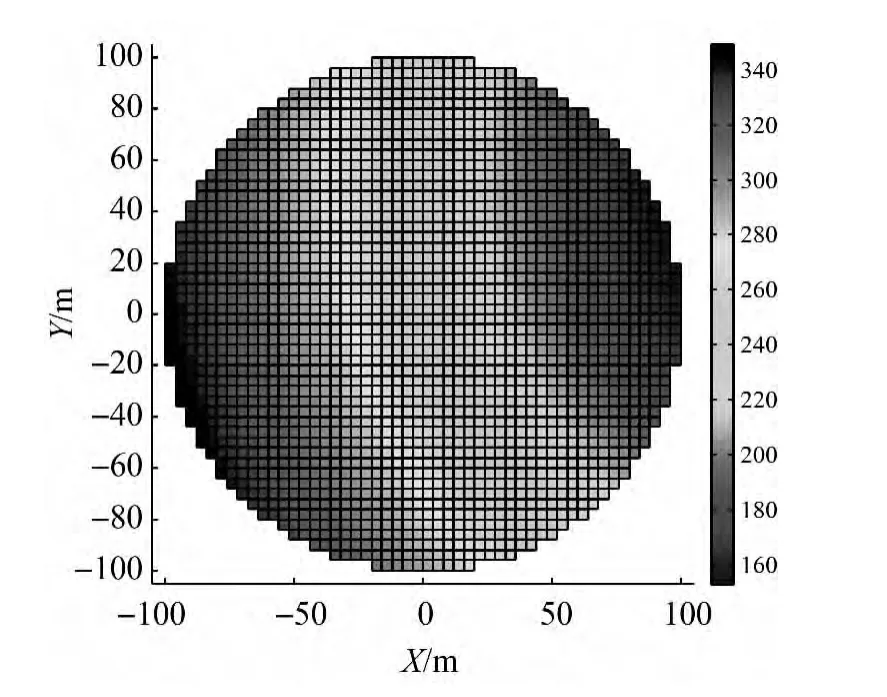
图7 JD-15测站的测距变化范围
3.观测高度角
图9、图10显示了JD-15棱镜和JD-21测站观测高度角变化范围。由于JD-15测站更靠近反射面边沿,因此其观测棱镜时的高度角偏小,最大值约为15°,最小值接近0°;JD-21测站相对靠近反射面中心,因此其观测棱镜时的高度角偏大,最大值约40°,最小值约为15°。因此,在馈源的整个运行轨迹上,观测高度角的分布比较合理,可兼顾水平和高程方向的精度控制。此外,较低的观测高度角有利于工程实践中全站仪的防护。
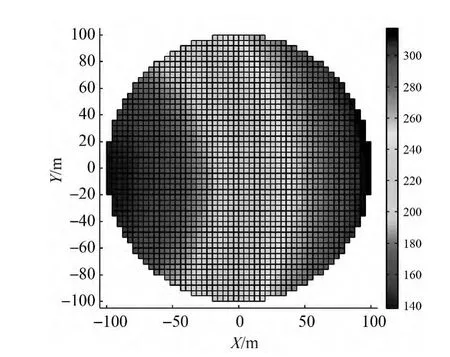
图8 JD-21测站的测距变化范围

图9 JD-15测站的高度角变化范围
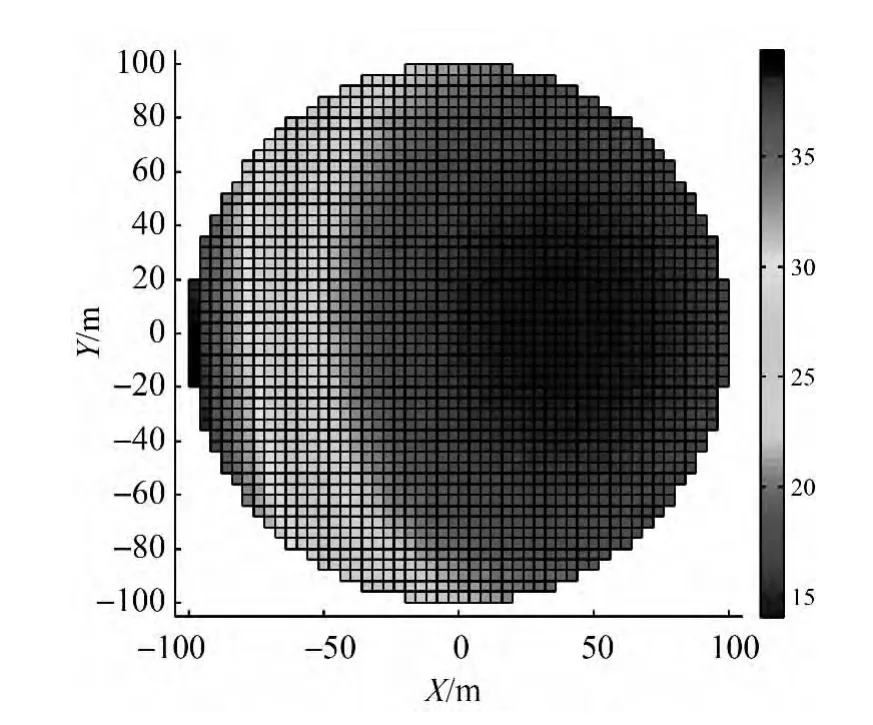
图10 JD-21测站的高度角变化范围
五、仿真测量定位精度分析
1.仿真测量方法
在JD-13、JD-14、JD-15、JD-17、JD-18、JD-19、JD-21、JD-22和JD-23共9个测站上设置9台全站仪,采用极坐标法仿真测量下平台9个棱镜。由于馈源最大运动速度约为12 mm/s,全站仪在百米尺度上进行的是准静态测量,距离和角度测量精度要低于标称精度。仿真测量中,参考徕卡TCA1800全站仪测量指标,取距离动态测量精度2 mm+1×10-6D,水平角和垂直角动态测量精度4″[14]。观测之前,全站仪需要进行定向,天文定向不失为一种有效的方法,即通过观测恒星、行星或月球实现[15-16]。
下平台的半径按2 m计算,9个棱镜均匀分布在圆周上。每台全站仪跟踪观测固定的棱镜,实时解算棱镜在测量坐标系下的坐标。棱镜在精调机构坐标系下的坐标可通过标较测量获得,根据9个公共点的坐标,可以计算精调机构坐标系在测量坐标系下的位置和姿态,即实现馈源舱精调机构的位置和姿态测量。
2.仿真计算结果
图11、图12给出了9台全站仪仿真测量精调机构的位置和姿态精度(RMS)。
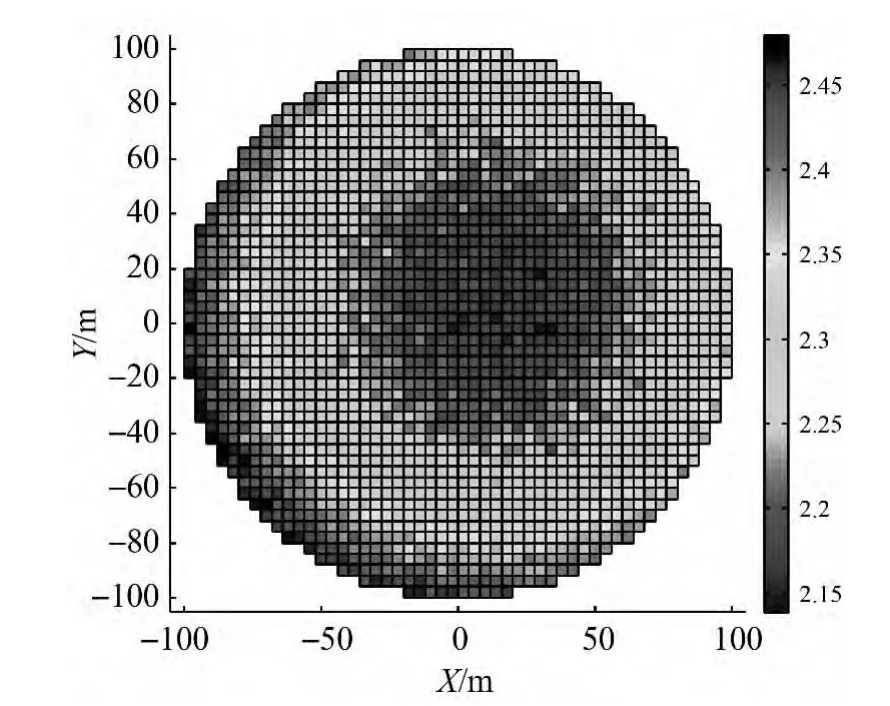
图11 精调机构位置精度
由图11、图12可知,9个测站的定位精度优于2.5 mm,定姿精度优于360″,均达到精调机构对位置和姿态测量的要求。
3.系统可靠性分析
为了检验测量系统的可靠性,下面采用6个测站(JD-13、JD-15、JD-17、JD-19、JD-21、JD-23)跟踪观测6个棱镜,仿真观测条件不变,结果如图13、图14所示。
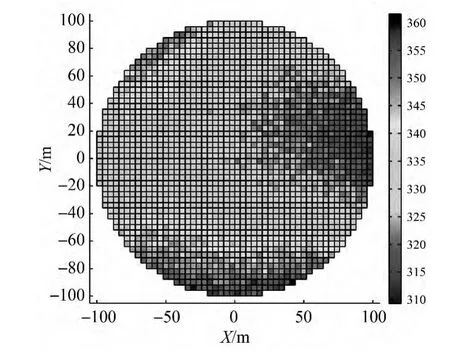
图12 精调机构姿态精度
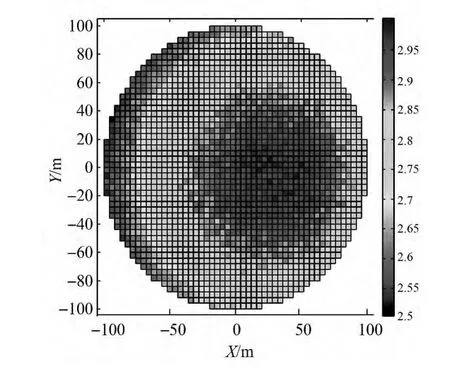
图13 精调机构位置精度
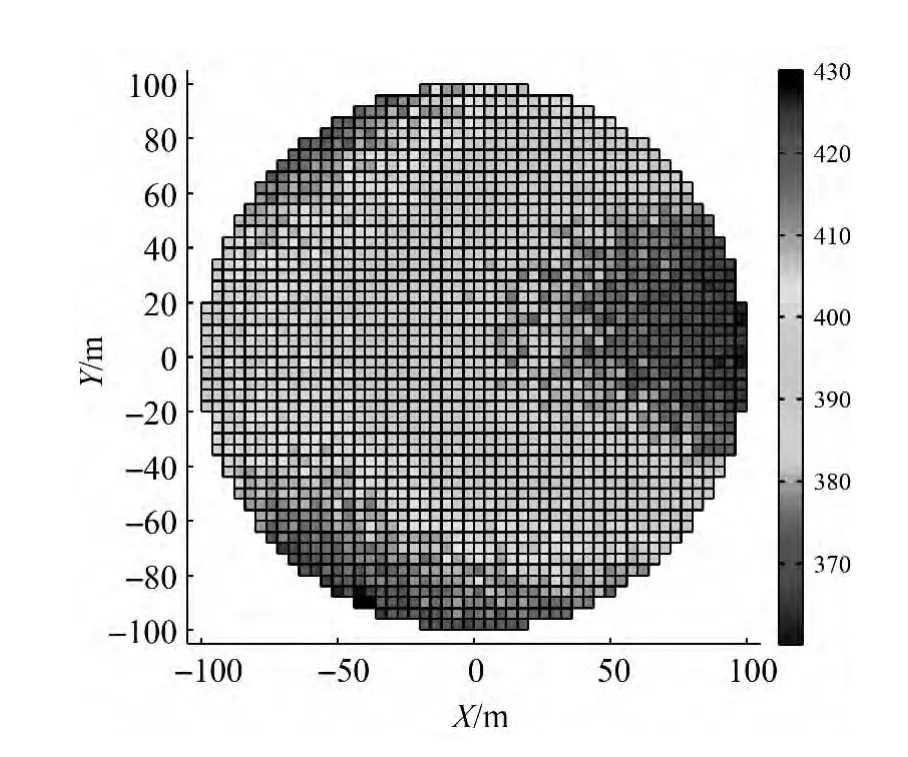
图14 精调机构姿态精度
如图13、图14所示,6个测站的定位精度优于3 mm,定姿精度优于430″,均达到精调机构对位置和姿态测量的要求,说明测量系统在保证测量精度的同时,至少有3个测站可作为备份,系统具有较强的冗余性。
上述仿真计算没有考虑实际测量中全站仪时间同步、测量时滞,以及风载荷等环境因素对测量精度的影响[17-18]。预计实际位置和姿态测量精度要低于仿真结果,系统的冗余测站数要少于3个。在具体的工程实践中,可根据观测经验和效果,增减测站数目,节约测量成本。
六、结束语
本文对全站仪测量系统的测量条件进行了计算和分析,结果显示,全站仪观测棱镜的最大入射角约为35°,平均值约为 13°~18°,由此产生的测量误差可以忽略;观测距离约为140~350 m;观测高度角约为0~40°。仿真测量结果表明,9个测站的定位精度优于2.5 mm,定姿精度优于360″;6个测站的定位精度优于3 mm,定姿精度优于430″,均达到精调机构的位置和姿态测量精度要求。本文提出的基于全站仪的精调机构位置和姿态测量系统,具有良好的观测条件和较高精度的定位定姿性能。
本文的研究论证了全站仪测量方案在FAST馈源舱精调机构位置和姿态测量中的可行性,对下一步的工程实践具有借鉴意义。
[1]NAN R D.Five Hundred Meter Aperture Spherical Radio Telescope(FAST)[J].Science in China Series G:Physics Mechanics and Astronomy,2006,49(2):129-148.
[2]朱丽春.500米口径球面射电望远镜(FAST)测量与控制研究[D].上海:中国科学院国家天文台,2006.
[3]骆亚波.测量机器人在FAST馈源动态跟踪测量中的应用[D].郑州:信息工程大学,2003.
[4]骆亚波,郑勇,夏治国,等.测量机器人动态测量技术及应用研究[J].测绘通报,2006(9):14-18.
[5]李明辉,朱丽春.FAST瞬时抛物面变形策略优化分析[J].贵州大学学报:自然科学版,2012,29(6):24-29.
[6]路英杰.大射电望远镜馈源支撑系统定位与指向控制研究[D].北京:清华大学,2007.
[7]KOVÁCS E.Rotation about an Arbitrary Axis and Reflection through an Arbitrary Plane[J].Annales Mathematicae et Informaticae,2012(40):175-186.
[8]何援军.图形变换的几何化表示[J].计算机辅助设计和图形学学报,2005,17(4):723-728.
[9]王美山,李文亮,杨传路,等.绕任意轴μ旋转φ对应的欧拉角的新求解公式[J].大学物理,25(9):31-33.
[10]王春艳,王志坚.基于旋转矩阵理论的火炮定向精度分析[J].光学精密工程,2004,12(4):108-111.
[11]刘万里,欧阳健飞,曲兴华.激光光束入射角度变化对角锥棱镜测量精度的影响[J].光学精密工程,2009,17(2):286-291.
[12]刘万里,王占奎,曲兴华,等.激光跟踪测量系统跟踪转镜的误差分析[J].光学精密工程,2008,16(4):585-590.
[13]武威.FAST主动反射面自动测量系统的研究[D].郑州:信息工程大学,2009.
[14]保宏,段宝岩,陈光达.具有慢速时滞机动目标三维跟踪[J].控制理论与应用,2006,23(4):526-530.
[15]詹银虎,张超,郑勇,等.月球视面中心拟合算法及其在测月快速定向中的应用[J].测绘学报,2012,41(3):353-358.
[16]詹银虎.基于自然天体的快速定向理论及技术研究[D].郑州:信息工程大学,2012.
[17]孙京海,朱文白,李辉.FAST大跨度索牵引运动控制系统全过程仿真分析[J].高技术通讯,2012,22(2):192-197.
[18]GAWRONSKI W.Control and Pointing Challenges of Large Antennas and Telescopes[J].IEEE Transactions on Control systerns Technology,2007,15(2):276-289.
猜你喜欢
铁路计算机应用(2022年8期)2022-09-06
中国测试(2022年5期)2022-06-10
航天器环境工程(2022年1期)2022-03-11
航天制造技术(2020年5期)2020-11-10
天文学报(2020年5期)2020-09-28
科技视界(2020年19期)2020-07-30
建材发展导向(2020年6期)2020-07-13
科技传播(2019年22期)2020-01-14
科教新报(2019年16期)2019-09-10
科学导报(2019年24期)2019-09-03