基于Google软件的农地区高程获取及精度评价
2015-12-12 01:47张宗毅
测绘通报 2015年2期
黄 琪,张宗毅
(1.中国科学院南京地理与湖泊研究所,江苏南京210008;2.中国科学院大学,北京100049;3.农业部南京农业机械化研究所,江苏南京210014)
一、引 言
数字高程模型(DEM)是基础地理信息系统数据库的重要组成部分,是进行空间地形分析的基础。对农地区域进行地形分析对于土地综合整治和农业机械化都有十分重要的意义。传统大比例尺地面测绘方法虽然精度高,但在大规模应用时成本较高,时效较低,因此专门针对农地区域的大比例尺和高分辨率测绘成果并不丰富。与传统大比例尺测绘相比,高分遥感和雷达技术可以快速高效地获取农地地形边界和特征点位高程。
Google Maps(谷歌地图)提供网络电子地图服务,包括矢量地图、卫星照片、地形图3种视图;而Google Earth将航拍照片、卫星影像、遥感影像和GIS数据进行了有效整合,可以提供全球不同分辨率的遥感影像,空间分辨率范围为 0.1~15 m[1]。目前,Google Earth已经广泛应用于GPS控制网布设[2-3]、铁路工程选线[4]、专题地图制图和大比例尺地形辅助测绘[5-6]等领域。此外,Google提供了以KML为模型设计的Google Earth API,用户可以通过结合专业开发语言开发应用[7]。
为探索和实现获取农地地形信息,本研究通过在ArcGIS软件中加载谷歌地图遥感影像,以数字化方式获得农地边界和特征点位信息;再根据Google Earth API开发相应程序批量获取地形边界节点和特征点高程,并进行高程精度分析,以期为区域土地综合整治和农业机械化提供决策参考。
二、材料与方法
1.研究区概况
研究区域位于安徽省含山县仙踪镇北部,选取分辨率最高的GeoEye-1影像覆盖区域与地形图相重叠的区域作为最终研究区,如图1所示,影像拍摄日期为2010年4月23日,影像云不影响本文研究结果。研究区坐标范围为 117.93°E—118.02°E,31.85°N—31.91°N。
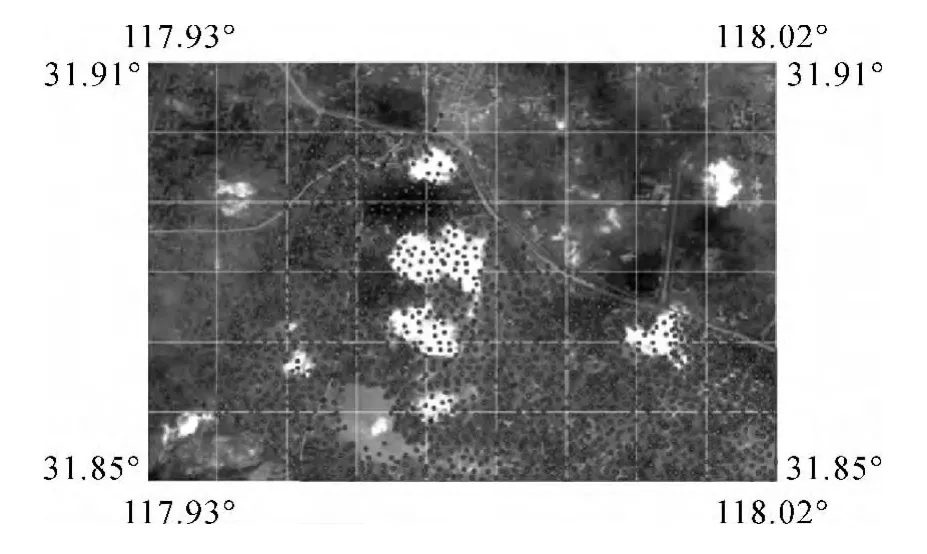
图1 研究区域与验证点位
2.数据来源
本研究验证数据为国家1∶1万数字地形图,控制点数据通过手持 GPS采集,共42个。SRTM3数据来源于国际农业研究磋商组织(CGIAR)网站[8],版本号SRTM3 v4.1,是目前可以免费使用的数据质量最高的版本[9];ASTER数据来自日本产经省官方网站[10],于2011年10月17日公布,图符号为ASTGTM2_N31E117和ASTGTM2_N31E118。
3.研究方法
(1)确定研究区范围
在ArcGIS中加载谷歌地图服务后,添加地形图边界,使用叠加功能确定研究区范围。本研究采用GeoEye-1影像与地形图相互重叠的区域作为最终研究区范围。
(2)基于Google Earth获取点位高程
基于Google Earth API开发获取高程的程序基本思路为:通过StreamReader()函数依次顺序地读取存放在Excel中的农地边界特征点经纬度数据,然后将读取的点位经纬度数据输入SetCamera-Params()函数,使点位显示在Google Earth客户端视图中心点位置,接着用 GetPointOn Terrain From-Screen Coords(0.0,0.0)函数获取 Google Earth 客户端视图中心点位置的IPointOn TerrainGE类型返回值,最后通过返回值的Altitude属性读取指定地块边界点的绝对高程信息。
为了避免程序使用过程中缓存资源占用越来越大导致数据采集速度快速下降和数据采集失真的问题,程序设置了间隔50 ms后重采集一次,若前后数据相等则进入下一点采集,若不等则再间隔50 ms后采集;若循环执行500 ms后仍无法得到稳定数据,则程序自动重启释放缓存,从断点开始运行程序,延迟10 000 ms待缓冲完成后继续采集。该措施保证了软件的鲁棒性和效率,该程序通过了连续运转2天采集数百万个点的测试,效果良好。
(3)高程精度分析
高程精度包括高程中误差分析[11]、数据统计分析两部分,在SPSS 19和ArcGIS 9.3软件中完成。中误差分析可以从整体上反映采样点高程值与真实值的离散程度。中误差模型假设检验点的高程为Hc(c=1,2,…,n),对应待检验点的高程为 Hd(d=1,2,…,n),则中误差公式表示为

为保证精度、控制成本,本研究采用1∶10 000数字地形图中已有的高程点位作为高程精度验证点。
(4)基于STRM3和ASTER GDEM数据获取点位高程
在ArcGIS9.3软件中,首先分别添加区域STRM3和ASTER GDEM数据(必要时完成多幅影像数据拼接),再运用工具箱中Spatial Analyst tools中Extract Values to Points工具通过空间插值方法分别提取基于STRM3和ASTER GDEM数据的点位高程,作为与基于Google软件方法进行比较的数据。
4.技术路线
数据处理和分析主要在ArcGIS 9.3软件中完成,主要包括:①在ArcGIS 9.3软件Web Map Service(WMS)服务中添加Google Maps地图服务,加载遥感影像地图;②在ArcGIS 9.3软件中新建图层,根据研究区影像进行农地边界和特征点位数字化;③根据控制点进行坐标变换,将数字化的矢量文件转换成节点文件,并计算节点文件的经纬度信息;④通过自主开发的软件,通过输入点位经纬度坐标获取点位高程值;⑤对获取的高程值进行精度评价,主要通过与相同点位在STRM3和ASTER GDEM数字高程模型上获取的高程值进行精度评估和对比。如图2所示。
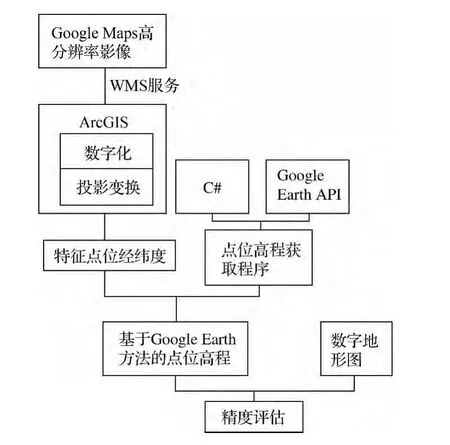
图2 技术路线
三、结果与分析
1.提取的高程
根据以上描述,采用3种方法提取相同点位的高程,并与验证数据进行比较,拟合得到的数据结果如图3所示。
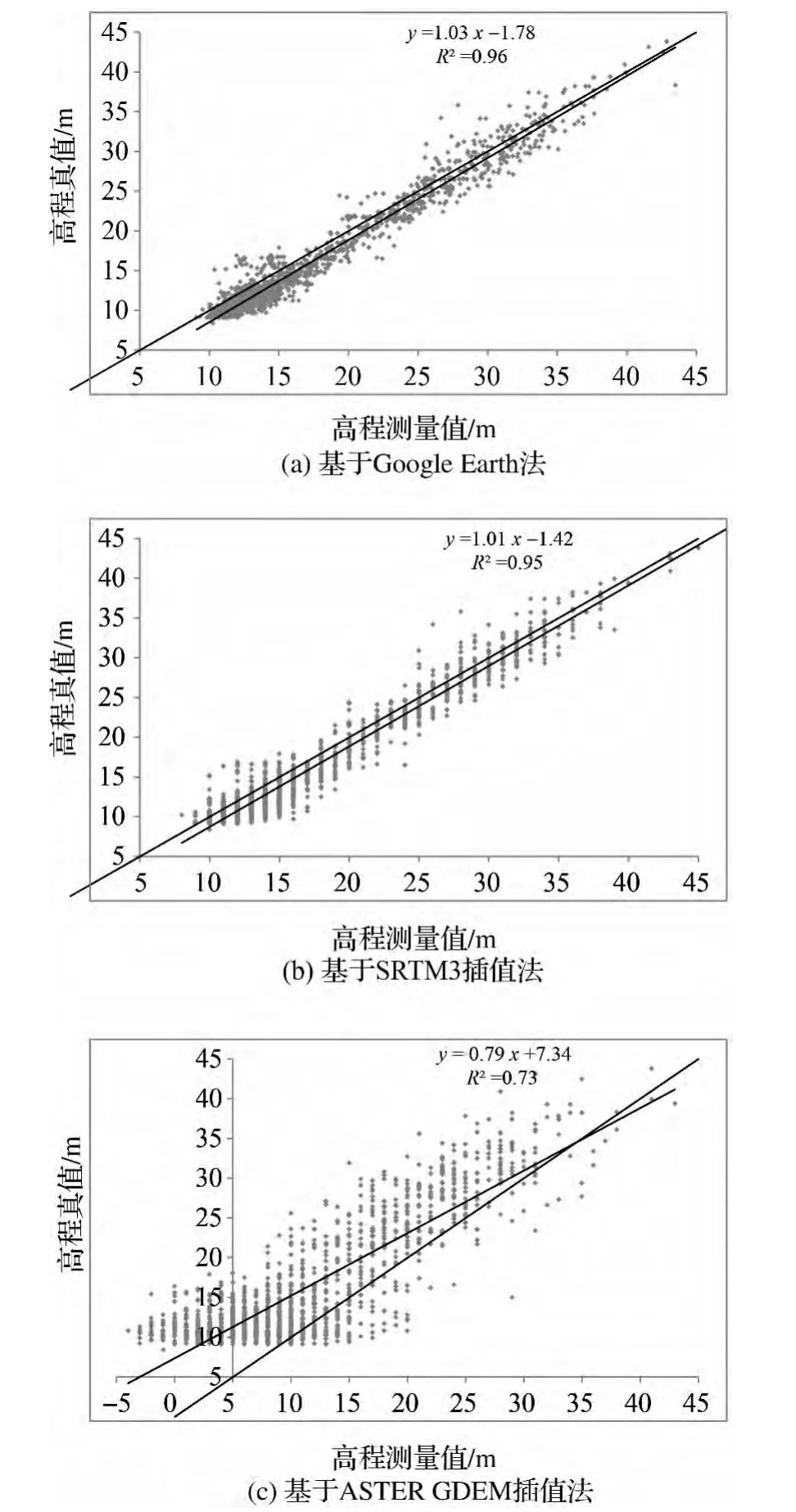
图3 3种方法获取地面高程与实测高程拟合图
3种方法获取的点位高程与验证点位拟合图结果显示,基于Google Earth方法和直接基于SRTM3数据插值方法精度接近,基于ASTER GDEM数据插值方法精度相对较差。拟合方差和相关系数显示,基于Google Earth和SRTM3方法的拟合方差R2分别为0.96和0.95,基于ASTER方法的拟合方差为0.73;同时前两种方法的系数分别为 1.03 和1.01,而后一种方法的拟合系数为0.79。此外,拟合方程截距结果显示,基于Google Earth与SRTM3方法截距分别为-1.78和-1.42,表明在该区域以上两种方法获取的高程点位整体偏高,而采用ASTER GDEM数据获取的地面高程点位整体偏低7.34,该方法对于实际地面10 m左右的高程无法准确表达,获取的数值分布范围从-5~20 m,存在较大误差。
2.中误差分析
据式(1),试验区1597个点3种方法的中误差分别为:Google Earth方法 1.91,SRTM3插值法2.07,ASTER GDEM 插值法 6.44,该分析结果与文献[12]对巢湖流域的分析结果相近。并且基于Google Earth与基于SRTM3插值法精度接近,两者均优于ASTER GDEM插值法。根据我国平地区域1︰1万和1︰5万DEM精度标准(见表1),本文方法和SRTM3法获取的高程点中误差低于1︰1万地形图,高于1︰5万地形图,而ASTER GDEM法获取的高程点中误差约为1︰5万三级水平。

表1 我国平地区DEM精度标准[13]
3.数据统计分析
研究进一步统计和分析了3种方法的极小值、极大值、均值、中位数、标准差、方差、偏度、峰度数据,结果见表2。
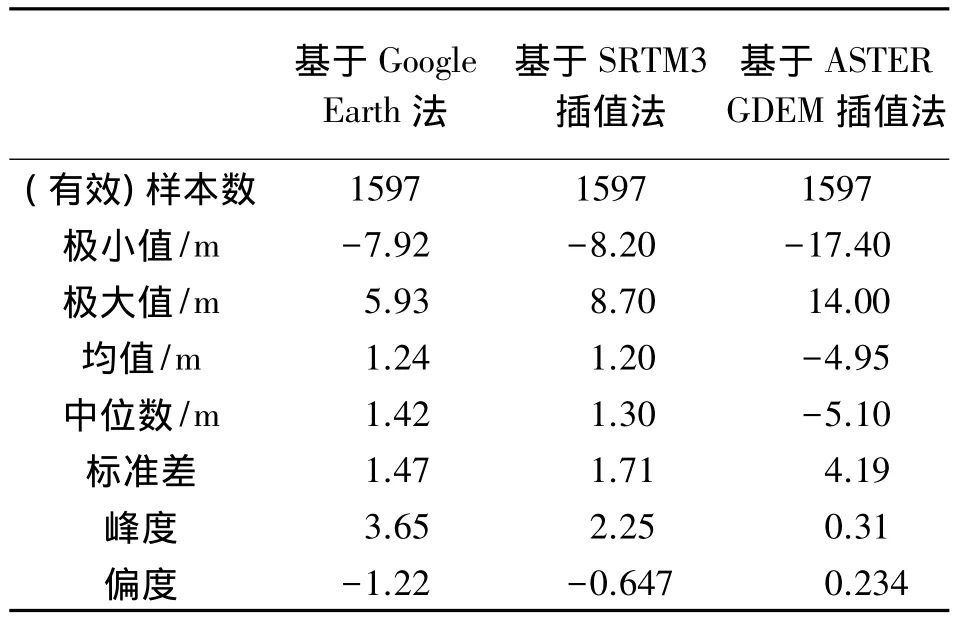
表2 3种点位高程获取方法与测量值描述统计分析
结果表明,基于Google Earth法与SRTM3插值法的极小值、极大值、均值、中位数、标准差、峰度评估结果均优于ASTER GDEM插值法,其中基于Google Earth法的极小值、极大值、标准差和峰度略优于SRTM3插值法。
四、结束语
本研究提出了一种整合应用Google软件,开发程序获取农地边界特征点坐标和高程的方法,并对获取的高程进行了评估,从而可以为土地整理和农地区数字地形分析提供辅助决策分析。
文中Google Earth、STRM3和ASTER GDEM 都采用EGM96高程系统,而验证数据采用1985国家高程系统,因此存在一定的系统误差。据文献[14—15]采用分布全国大陆范围的水准数据(共949个GPS控制点)和地球重力场模型 EGM96、DQM99A,求出全国范围内1985国家高程基准比WGS-84定义的似大地水准面(即EGM96高程系统)平均高约 0.355~0.357 m。本研究计算结果表明,研究区内基于Google Earth法和基于STRM3数据插值法与验证数据中误差分别为1.91和-2.07,而采用两个高程系统之间的差值对获取高程的结果平差后,中误差精度分别扩大到2.15和2.19,仍优于1∶5万地形图。本研究发现,研究区内采用STRM DEM法获取的点位高程平均值比采用ASTER GDEM法获取的点位高程高6.14 m,主要原因是研究区内ASTER GDEM数据对于10 m左右的高程描述极不稳定,出现了一些负值。而据文献[16—17]对中国及周边地区的STRM3数据和ASTER GDEM数据的统计分析结果,虽然两者均采用EGM96坐标系统,但 STRM DEM高程比 ASTER GDEM高程平均高4.9 m,本研究结果与之接近。
由于Google Earth软件采用了SRTM3数据源,因此本研究方法与基于SRTM3数据直接插值方法得到的高程和精度评估结果十分接近,但是相较于直接采用SRTM3数据获取地面点位的方法,综合运用Google软件仍具有两个方面的优势:①可通过加载高分辨率遥感影像,对农地区地形边界和地物特征点位进行精确数字化,并通过控制点位进行几何校正,减小系统误差,而SRTM3数据几何分辨率较低,难以寻找地物特征点位进行几何校正,可能因此导致较大水平误差。②通过开发程序,不仅实现了大批量快速获取高程点位,而且该方法还可以对获取的高程点位结合高分辨遥感影像进行人工核对和确认,便于数据检查,而采用SRTM3数据进行插值几乎无法检查数据。因此,该方法有较好的应用潜力。鉴于验证数据获取的难度,本研究方法还需要在不同地貌区域(如山地、丘陵)进行高程精度研究,并且评估Google Maps相似地貌不同遥感数据源的区域高程精度差异的研究,以便为相关地区的土地综合整治、农业机械化等研究提供决策分析和参考的技术依据。
[1]Wikipedia.Google Earth[EB/OL].(2012-12-18)[2014-05-27].http:∥en.wikipedia.org/wiki/Google_Earth.
[2]刘瑞敏,李华,王思锴,等.基于Google Earth的地铁亦庄线GPS控制网布设[J].测绘通报,2008(11):47-49.
[3]唐东跃,熊助国,王金丽.Google Earth及其应用展望[J].地理空间信息,2008,6(4):110-113.
[4]耿长良.Google Earth在城市轨道交通工程控制网布设中的应用[J].测绘通报,2011(7):54-56.
[5]陈建平,常庆瑞,陶文芳,等.基于Google Earth的GIS专题制图技术研究与应用——以陕西省土壤分类信息系统开发为例[J].水土保持通报,2008,28(6):63-67.
[6]刘东,施昆.利用 Google Earth影像辅助大比例尺地形图测量的方法[J].测绘通报,2013(1):68-69.
[7]Google Developers.What is the Google Earth API?[EB/OL].(2012-02-24)[2014-05-27].https:∥developers.Google.com/earth/?hl=en.
[8]The CGIAR Consortium for Spatial Information.SRTM 90m Digital Elevation Data[EB/OL].(2008-08-19)[2014-05-27].http:∥srtm.csi.cgiar.org.
[9]JARVIS A,RUBIANO J,NELSON A,et al.Practical Use of SRTM Data in the Tropics-Comparisons with Digital Elevation Models Generated from Cartographic Data[EB/OL].[2014-05-27].http:∥srtm.csi.cgiar.org/PDF/Jarvis4.pdf.
[10]METI/NASA.ASTER Global Digital Elevation Model[EB/OL].(2011-10-17)[2014-05-27].http:∥gdem.ersdac.jspacesystems.or.jp.
[11]詹蕾,汤国安,杨昕.SRTM DEM 高程精度评价[J].地理与地理信息科学,2010,26(1):34-36.
[12]李伟涛,王春,李鹏.巢湖流域 SRTM高程误差的空间分异研究[J].资源开发与市场,2012,27(12):1062-1064.
[13]国家测绘局.基础地理信息数字成果 1∶5000、1 ∶10 000、1 ∶25 000、1 ∶50 000、1 ∶100 000 数字高程模型[S].北京:测绘出版社,2010.
[14]焦文海,魏子卿.1985国家高程基准相对于大地水准面的垂直偏差[J].测绘学报,2002,31(3):196-200.
[15]郭海荣,焦文海,杨元喜.1985国家高程基准与全球似大地水准面之间的系统差及其分布规律[J].测绘学报,2004,33(2):100-104.
[16]赵国松,杜耘,凌峰,等.ASTER GDEM与SRTM3高程差异影响因素分析[J].测绘科学,2011,36(4):167-170.
[17]赵海涛,张兵,左正立,等.中国及周边区域 ASTER GDEM与 SRTM DEM高程对比分析及互补修复[J].测绘科学,2012,37(1):8-11.
猜你喜欢
当代陕西(2020年23期)2021-01-07
航天制造技术(2020年4期)2020-09-11
智富时代(2019年7期)2019-08-16
智富时代(2019年7期)2019-08-16
制造技术与机床(2018年12期)2018-12-23
证券市场红周刊(2018年37期)2018-05-14
消费导刊(2017年8期)2018-01-18
浙江大学学报(工学版)(2016年11期)2016-06-05
浙江大学学报(工学版)(2016年10期)2016-06-05
全球定位系统(2015年4期)2015-02-28