岸桥倾转及挂舱保护改造
2016-04-08 02:21青岛前湾集装箱码头公司
港口装卸 2016年1期
关键词:组态
青岛前湾集装箱码头公司 潘 广
岸桥倾转及挂舱保护改造
青岛前湾集装箱码头公司潘广
摘要:针对早期70 t岸桥的倾转问题提出了改造方案,在后大梁上安装4个具有倾转及挂舱保护功能的液压油缸,通过计算得出倾转油缸的速度与比例阀电流的关系后进行组态编程,形成稳定安全的倾转及挂舱装置,解决了以前易出现倾转故障及没有挂舱保护功能的安全隐患。
关键词:倾转; 挂舱; 比例阀; 电磁线圈; 组态
某公司使用的上海港机早期生产的3台70 t-70 m岸桥,其吊具下到20 m深的船舱吊运集装箱时,易发生挂舱问题,由于没有相应的保护装置,致使钢丝绳接近其破断力,同时对整机机械结构的薄弱环节造成破坏,因此需要对倾转机构进行改造。
1倾转机构构成及倾转运动
岸桥由卷筒带动4根钢丝拉动吊具。将吊具的海左定义为B、海右为C、陆左为A、陆右为D。改造时,去除前大梁接线箱、 3个丝杠及减速箱电机部分,将钢丝绳在前大梁上用压板压住,保留重量传感器。在后大梁上加装4个具有倾转及挂舱保护功能的油缸,从左到右依次为1、2、3、4。岸桥起升钢丝的运行情况见图1。
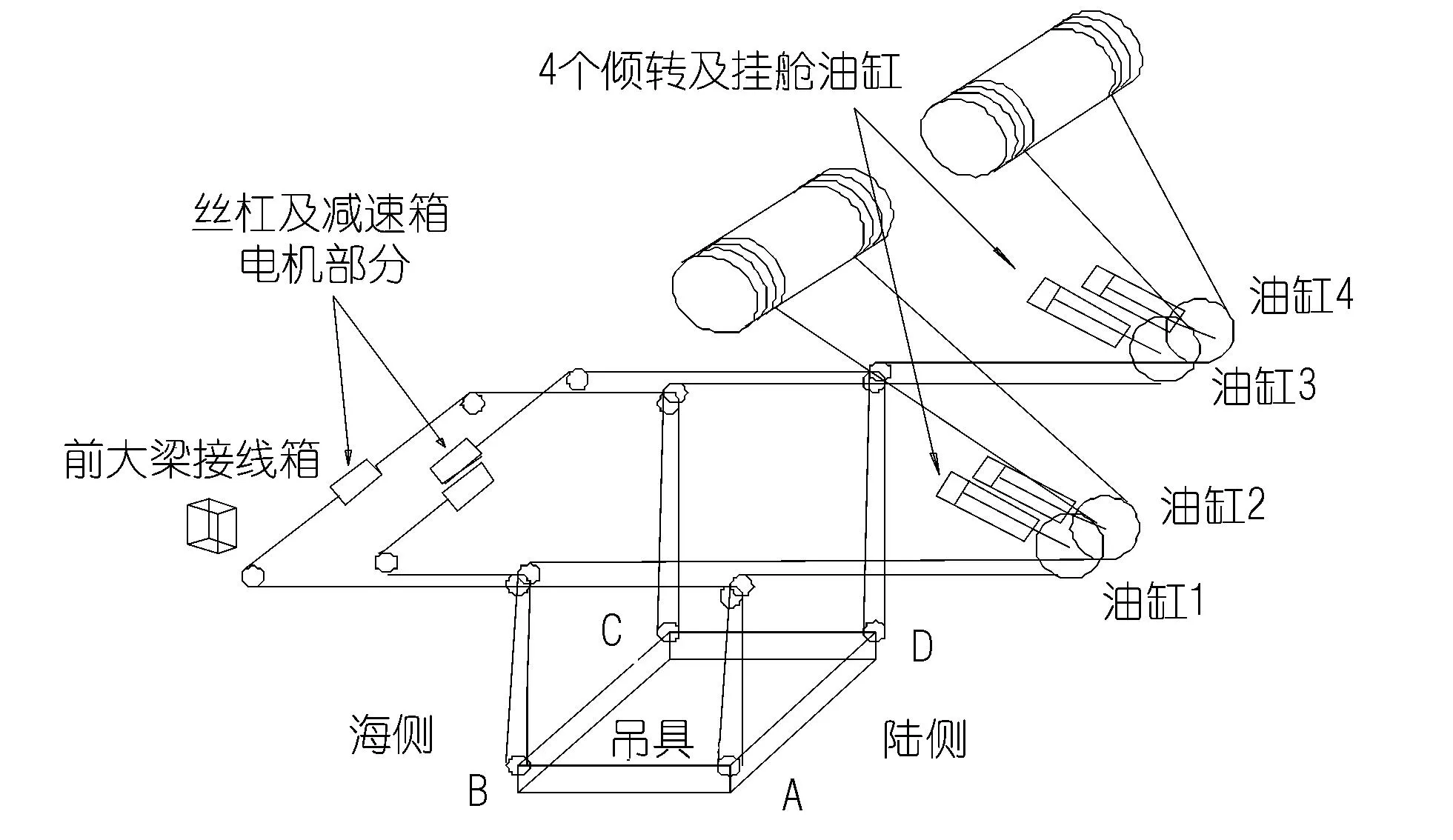
图1 起升的整体示意图
在装卸集装箱的过程中,由于船舱倾斜、集卡停位倾斜等原因,司机要经常用到左倾、右倾、前倾、后倾、左旋、右旋6个动作。这6个动作以下简称为倾转,见图2。
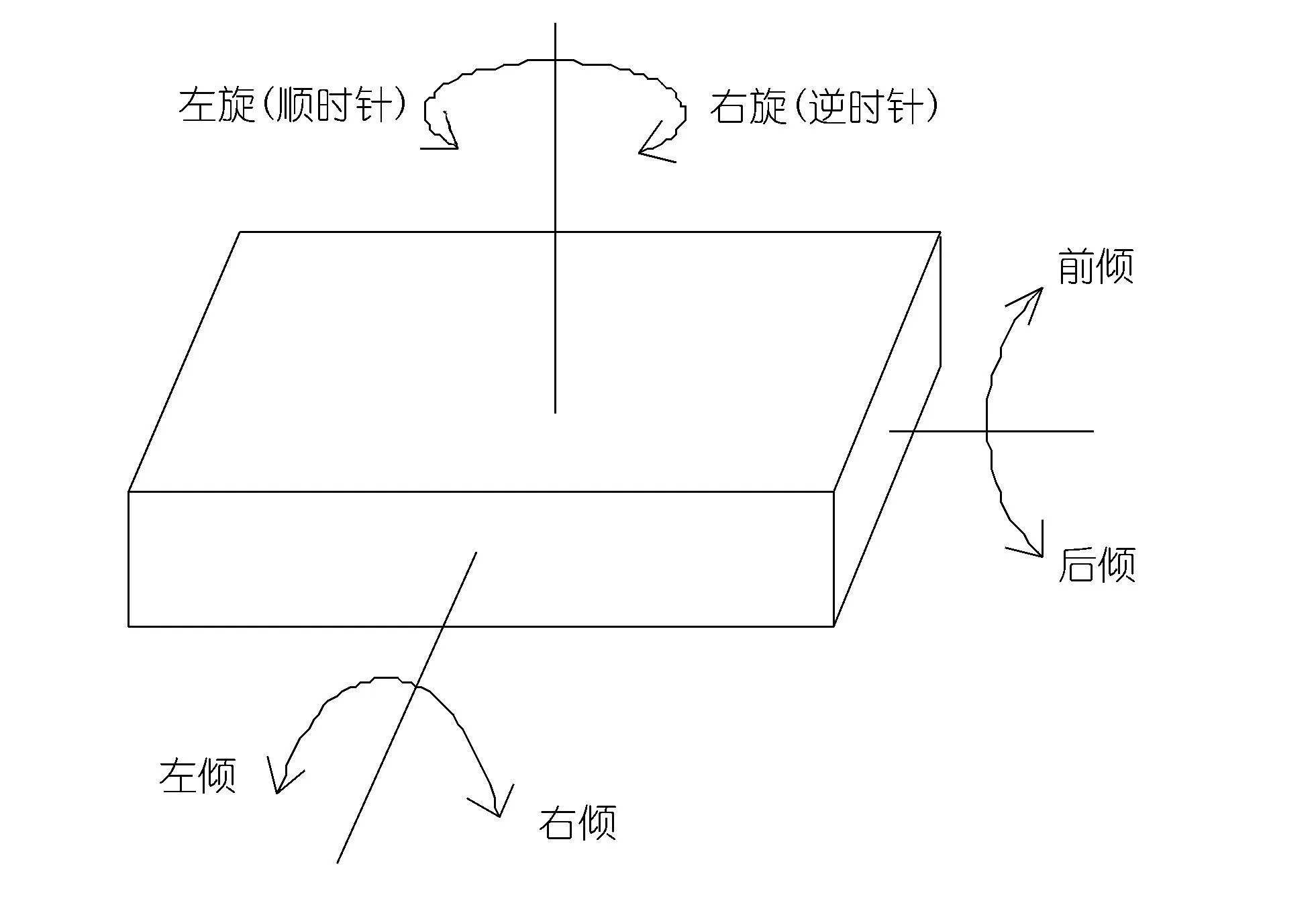
图2 吊具倾转动作示意图
2倾转与挂舱保护的设计及改造
2.1硬件配置
硬件配置见表1。
2.2后大梁机械部分的设计及安装
在后大梁的起升钢丝滑轮部位安装油缸底座、斜拉杆等装置。当倾转油缸伸缩时,通过拉杆带动滑轮前后运动,调节钢丝实现倾转动作。后大梁实际安装后的情况见图3。
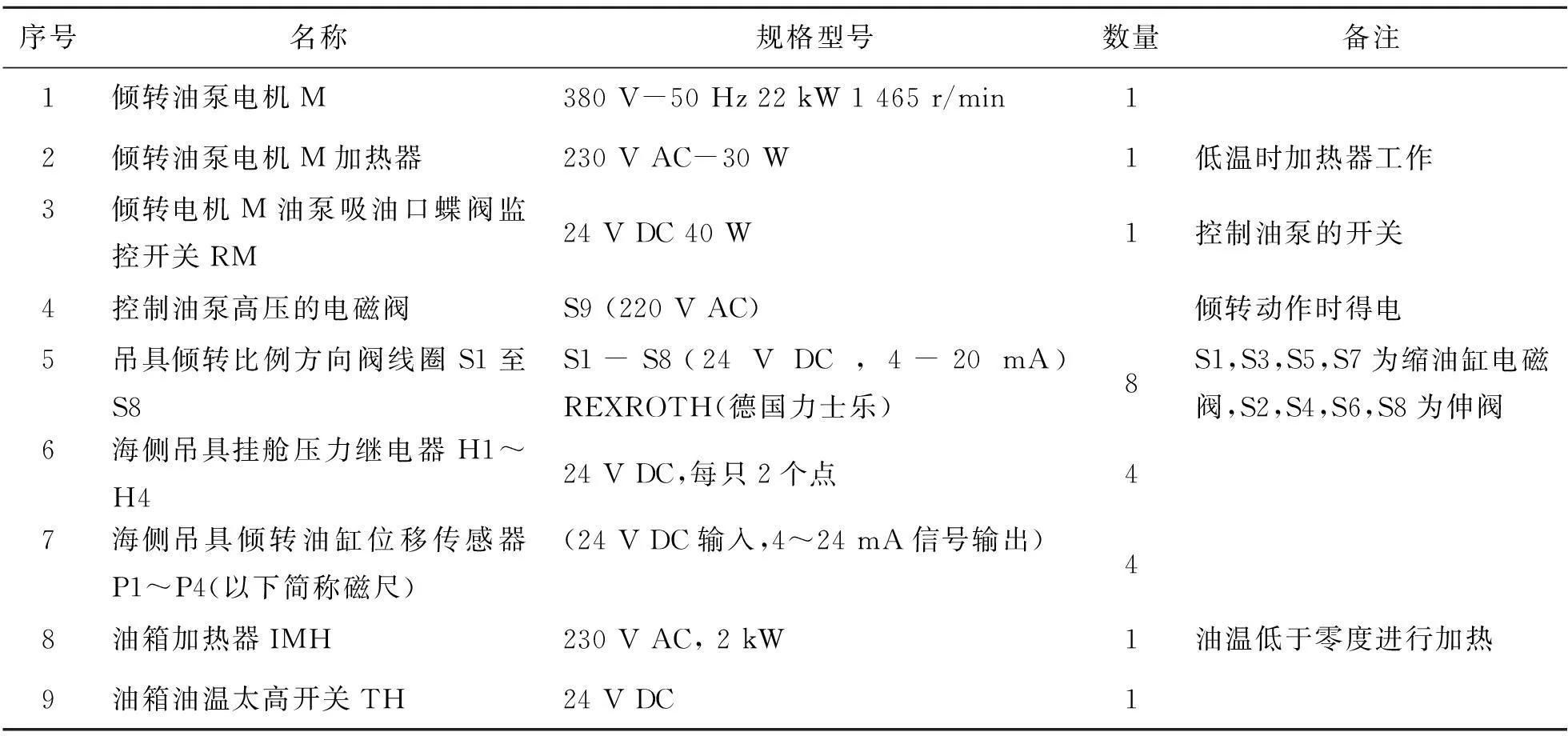
表1 倾转改造所需要的硬件配置
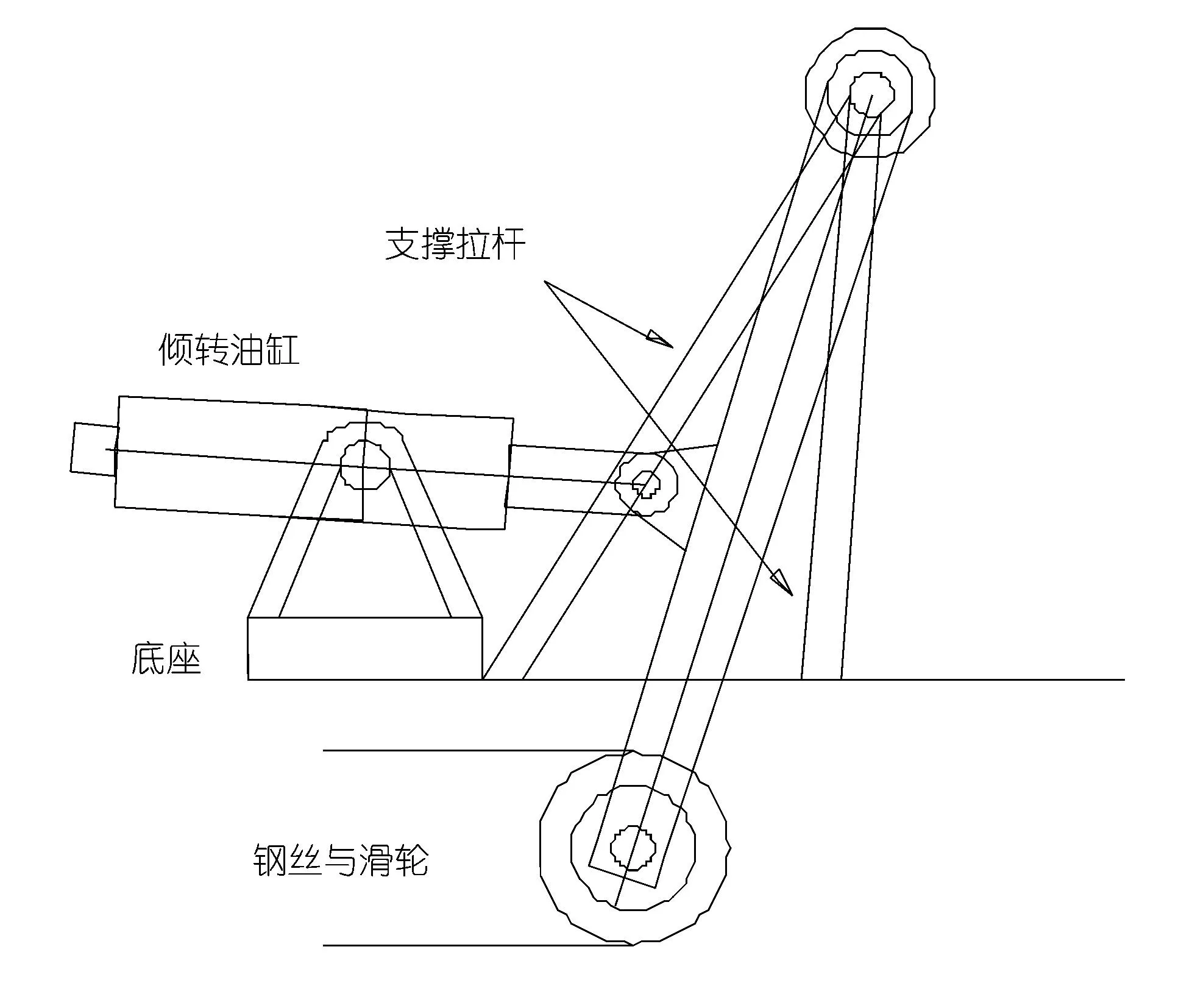
图3 后大梁油缸机械结构
2.3倾转与挂舱动作工况设计
2.3.1吊具倾转比例方向阀线圈S1至S8工况设计
比例方向阀(三位四通阀)通过比例电磁线圈控制油液的方向和流量。以油缸1为例,每一个比例方向阀有2个比例电磁线圈,共有S1-S8共8个比例电磁线圈。输入电压为24 V DC,输入指令电流为4~20 mA;PLC程序将发信号控制相应的电磁线圈,由信号量控制比例阀的开口量,决定油缸行走的方向和速度。
(1)指令电流为12~20 mA, 相应的比例电磁阀的流向为P′A, B′T,即电磁线圈S2、 S4、 S6、 S8得电,指令值愈大,比例阀输出愈大,通过比例阀的流量愈大,油缸外伸的速度愈快。
(2)指令电流为4~12 mA, 相应的比例电磁阀的流向为:P′B, A′T,即电磁线圈S1、 S3、 S5、 S7得电,指令值愈小,比例阀输出愈大,通过比例阀的流量愈大,油缸内缩的速度愈快。
比例阀有15%指令信号范围遮盖量,即指令信号的1.2 mA起始量内比例阀没有流量输出,即比例阀指令信号大于或小于12±1.2 mA后,比例方向阀才有输出,见图4。
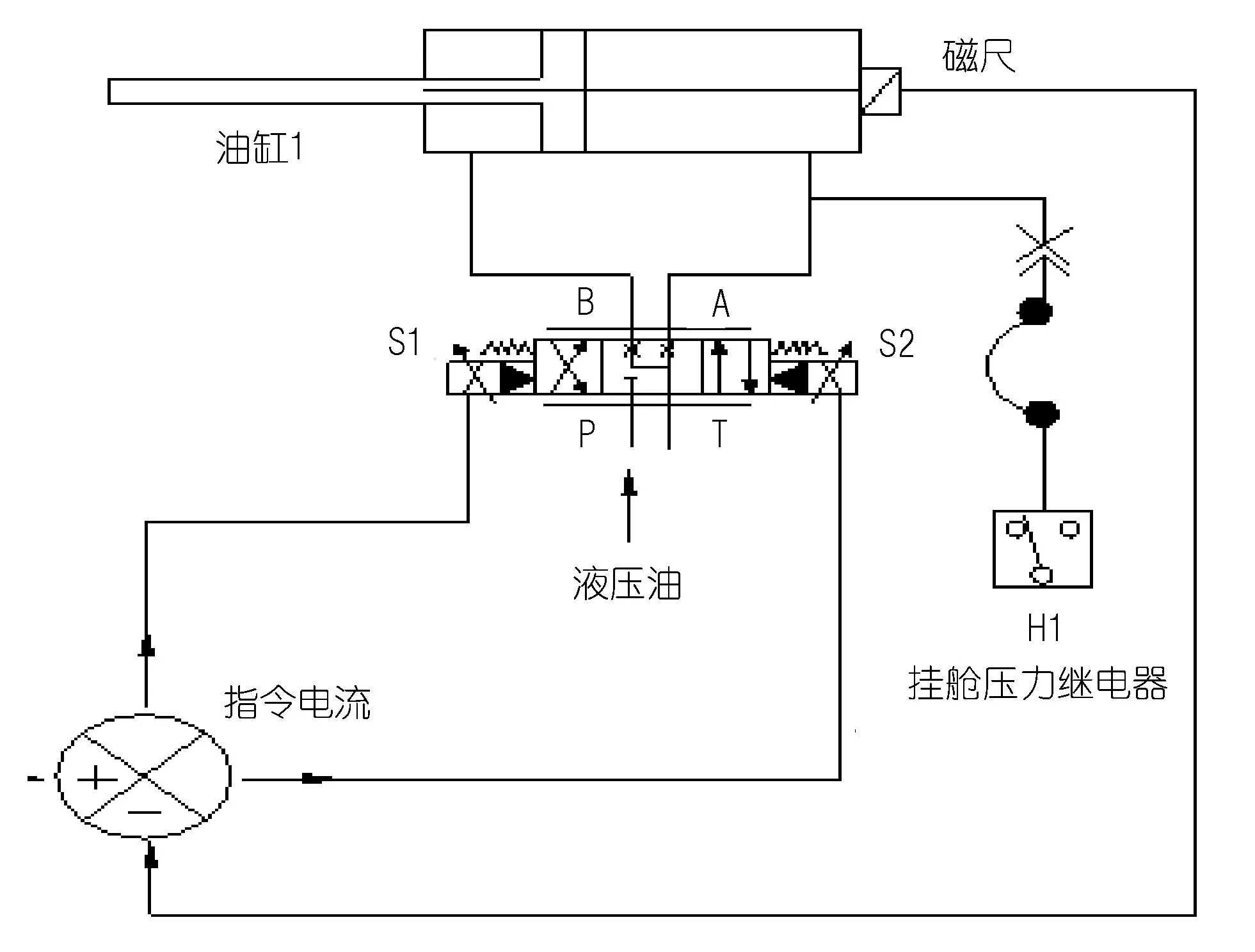
图4 比例方向阀液压方向及磁尺与指令的关系
2.3.2吊具倾转动作时各阀得失电的设计
当司机操作手柄进行倾转动作时,电机M得电,经过0.5 s后高压阀S9得电,相应的比例阀得电以完成指令动作(在任何情况下,只有当挂舱油泵所用的蝶阀的行程开关RM闭合,表明油泵吸油口畅通时,油泵马达M1才可得电运转);吊具的倾转由4个油缸的动作完成,油缸的运动方向由8个比例方向阀的电磁线圈控制。4个油缸的直线位移传感器测量和控制4个油缸的运动位置。高压阀S9用来控制倾转油泵的压力。当8个比例电磁线圈中的任何一个得电时,S9必须得电。只有当8个比例电磁线圈都失电时,电磁线圈S9才可以失电。
根据图1、图2所示倾转钢丝动作情况,以及吊具倾转比例方向阀线圈S1至S8的伸缩情况,得出吊具倾转时相应阀的得电关系(见表2,+表示得电)。以上动作均通过PLC控制完成。
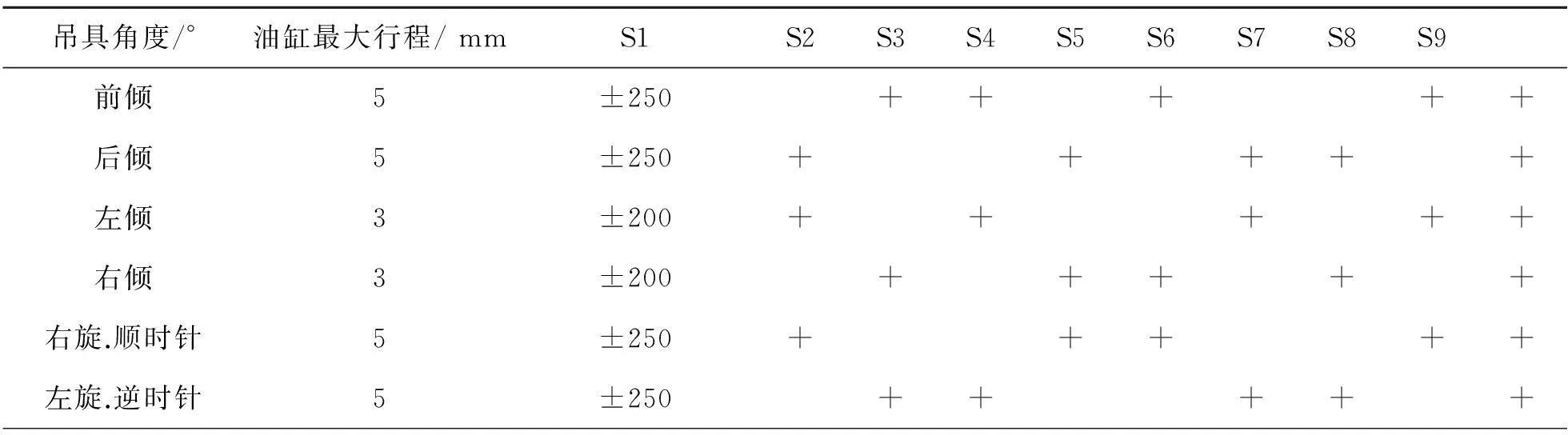
表2 吊具倾转时相应阀的得电关系
2.3.3倾转速度控制设计
为了保证倾转油缸运动时动作的准确性(以前倾为例,要S2、S3、S5、S8得电),4个倾转油缸在相同的时间内有预期的位移,如果有个油缸没有到达预期位移,吊具可能就发生了旋转动作,造成司机调不到预期的前倾位置),因此PLC要一直控制4个油缸的速度,4个油缸必须在运动目标上保持同时到达,即时间保持同步,误差不能超过5%。
(1)变量的定义
Dn(其中n=1, 2, 3, 4,下同)为由油缸磁尺在线输出的油缸绝对位移,油缸完全缩进时,为0;D0为油缸中位的绝对位移,根据倾转行程人工输入,并由控制系统记忆;Aa为无杆腔面积,Aa=314.1 cm2;Ab为有杆腔面积,Ab=160.3 cm2;Qp:油泵流量,Qp=75 L/min;ΔDn:油缸相对于O位(Home位)的相对位移,可以由控制系统计算出;ΔDn=Dn-D0,ΔDn>0表示油缸已伸出,ΔDn=0表示油缸在中位,ΔDn<0表示油缸已缩进;Qn为油缸应进油的流量;Vn为油缸的速度。
(2)电流控制油缸的运动方向和速度控制
岸桥的PLC程序能够控制每一个油缸的状态(伸出或缩进),输出相应的电流控制油缸的运动方向和运动速度。控制原理为:
①系统首先检测到每个油缸当前位置和动作的目标值,如:归“0”动作的全部油缸会到“0”位和前后倾动作在同时间段内按比例协调的向30 mm前进。
②根据油缸位置和每个油缸动作的目标值,计算出要求每个油缸同时达到目标值要填充的油量。
③根据油泵最大供油量,计算出完成这些目标值即完成这些填充油量所需的总时间。
④根据比例阀的属性预选相应阀的信号量。
⑤根据油缸在PLC扫描一个周期内的位移和经过的时间,计算油缸的瞬时速度。
⑥根据油缸实际输出的速度与要求的速度的差值,计算出要增加或减少的流量。
⑦根据样本的电流变化所引起的流量变化的比例关系,计算出要增加或减少的信号电流值。
⑧通知控制系统修正电流值,并且在目标值到达以前,速度纠正在PLC周期中一直在循环,从⑤循环到此。
⑨为了纠正因速度纠正引起的积累误差,每经过若干PLC周期,重新检测目标值位置,从①重新循环,直到油缸在误差范围内到达目标值。
(3)电流控制油缸的运动方向和速度及位移的计算
以倾转油缸作归“0”运动为例:PLC首先检测4个油缸的位置,得出D1、 D2、 D3、 D4,并根据存储的“0”位,计算出油缸的向量位移。如果油缸是伸出的ΔDn>0,当作复位动作时,这个油缸将要缩进到“0”位。油液从P-B,A-T,也就是电磁线圈S1、S3、S5、S7将得电,即给出电流值在12~4 mA。相反,如果油缸相对于“0”位是缩进的(ΔDn<0),当作复位动作时,这个油缸将要伸出到“0”位。油液从P-A, B-T, 也就是电磁线圈S2、S4、S6、S8将得电,即给定电流值为12~20 mA。
已知:D1、 D2、 D3、 D4,计算ΔDn和|ΔDn| 。
相应的油缸进油量应为:
Qn=|ΔDn|×A/t, ,如果ΔDn>0, 油缸要回缩,A选择油缸有杆腔面积Ab,如果ΔDn<0, 油缸要外伸,A选择油缸无杆腔面积Aa。
根据REXROTH 比例阀的样本,得出开口值与控制电流的关系:
ξn=〔(0.23Qn+5)/12.5〕,ξn(100%),Qn(L/min,
I1=12±ξn×8
当Qn=12.5 L,ξn=0.63=63%;
当Qn=25 L,ξn=0.86=86%;
IfΔDn>0,II=12-ξn×8; within 12-4 mA; Whenξn=0.63=63%,II=6.96 mA,
IfΔDn<0,II=12-ξn×8; within 12-20 mA; Whenξn=0.86=86%,II=18.88 mA,
控制电流:II=12±ξn×8; 。该公式中“±”由ΔDn的正负来决定,当ΔDn>0, 选择“-”;当ΔDn<0, 选择“+”。但电流最大值不应大于20 mA和小于4 mA。


当油缸外伸时,每增加和减小1 mA电流,油缸的速度将增加和减小0.36 cm,即0.36 cm/mA。
当油缸内缩时,每增加和减小1 mA电流,油缸的速度将增加和减小0.70 cm,即0.70 cm/mA;
按照此比例在PLC的编程中对油缸的速度进行再调整。
根据以上的计算过程,可得出倾转的速度控制。前倾时S2与S8初始得电量18.88 mA (86%),S3与S5初始得电量6.96 mA (63%);后倾时S1与S7初始得电量6.96 mA (63%),S4与S6初始得电量18.88 mA (86%);左倾时S1与S3初始得电量6.96 mA (63%),S6与S8初始得电量18.88 mA (86%);右倾时S2与S4初始得电量18.88 mA (86%),S5与S7初始得电量6.96 mA (63%);右旋时S1与S5初始得电量6.96 mA (63%),S4与S8初始得电量18.88 mA (86%);左旋时S2与S6初始得电量18.88 mA (86%),S3与S7初始得电量6.96 mA (63%)。上述值都是当给出倾转指令时比例阀的预先给定量,在倾转动作进行过程中,这些值应当根据速度要求的自动控制程序自动进行调整[1]。
2.4挂舱工况
当岸桥的负荷超过额定负荷的20%时,压力继电器H1~H4中任一个断开发讯,发出挂舱信号,主起升即停。控制电跳并高扬声报警。经仔细检查桥吊并手动控制复位后,吊具只能慢速“下降”而不能“上升”,吊具下降解除挂舱后,按下“挂舱复位”按钮,油缸回中位,挂舱故障解除。
3PLC程序组态等的改造
在PROFIBUS分布式IO中插入ET200M,并命名为(12)LTC。ET200M是Profibus中的站点模块,ET200M用于与标准的S7 400模块一起组成远程I/O站,IM153-1作为 ET200M的接口模块,将ET200M作为从站连接到Profibus DP上,见图5。
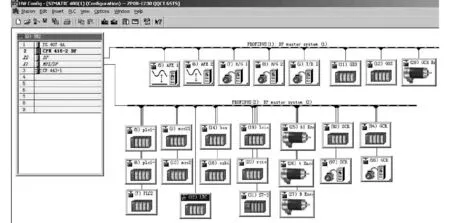
图5 Profibus插入的(12)LTC
IM153-1带有2个AI模拟量输入模块,用于磁尺的位置输入,电流为4~20 mA 。1个AO模拟量输出模块,用于控制比例阀,电流为4~20 mA 。3个点对点输入模块,相应的地址系统自动分配,以方便程序的编写[2],见图6。
4后大梁按钮箱的安装
为了便于对倾转油缸的任意控制,在后大梁安装控制箱,加装按钮。2个普通带灯按钮“控制合”(绿色)和“控制断”(红色)。1个2位选择开关:“本地操作”和“司机室控制”。1个普通2位选择开关:“油泵开”和“油泵关”。1个普通3位自动回中选择开关“油缸伸”、“中位”和“油缸缩”。1个4位选择开关,用于对4个倾转油缸的选择。
5结语
对3台岸桥改造以后,由于取消前大梁模块箱和倾转电机丝杠装置,消除了模块故障和丝杠断裂故障隐患,从而提高了装卸效率。在后大梁加装油缸后倾转动作可靠、迅速,具有挂舱保护功能后,发生挂舱时能够进行有效的缓冲,同时保证了整机机械结构稳定耐用,杜绝了安全隐患,提高了岸桥的使用寿命。
参 考 文 献
[1]张利平.液压阀原理使用与维护[M]. 北京:化学工业出版社, 2015,324-338.
[2]陶权. S7-300/400PLC基础及工业网络控制技术[M] 北京:机械工业出版社,2015:191-210.
潘广: 266033, 山东省青岛市抚顺路11号乙4号楼1-502
Transformation of the Rotation and Hanging Protection of Quay Crane
Qingdao Qianwan Container Terminal Co.,Ltd. Pang Guang
Abstract:By setting 4 hydraulic cylinders with rotating function and hanging protection on the back girder of quay crane, and making configuration programming based on the relationship between the speed of rotating oil cylinder and the electric current of proportional valve, this paper proposes a transformation method of the rotation problem on early 70 t quay crane and creates a stable and safe rotation and hanging protection device to removes the hidden danger.
Key words:rotation; hanging; proportional valve; solenoid coil; configuration
DOI:10.3963/j.issn.1000-8969.2016.01.017
收稿日期:2015-07-28
猜你喜欢
河北农机(2020年10期)2020-12-14
物理学报(2019年6期)2019-04-10
制造技术与机床(2018年9期)2018-09-19
现代制造技术与装备(2018年2期)2018-03-30
凿岩机械气动工具(2017年2期)2017-07-19
制造技术与机床(2017年2期)2017-05-04
通信电源技术(2016年4期)2016-04-04
中国铸造装备与技术(2015年5期)2015-12-10
凿岩机械气动工具(2015年3期)2015-11-11
中国交通信息化(2015年9期)2015-06-06