带种子补偿的时空背景差分高速公路车辆检测算法研究
2016-06-05 14:18张旭锦廖雪花郭敏任春华
四川师范大学学报(自然科学版) 2016年3期
张旭锦,廖雪花*,郭敏,任春华
带种子补偿的时空背景差分高速公路车辆检测算法研究
张旭锦1,廖雪花1*,郭敏2,任春华1
(1.四川师范大学计算机科学学院,四川成都610066;2.西南交通大学信息科学与技术学院,四川成都610031)
提出一种带种子补偿的时空背景差分高速公路车辆检测算法.由于高速公路场景的特殊性,首先基于混合高斯模型的背景差分、相邻帧差法以及邻域背景差分法的结合消除光照变化、场景扰动对检测结果的影响;然后通过基于HSV颜色空间的阴影消除判断并消除被误检为车辆的阴影;最后通过跟踪种子补偿去除差分方法造成的空洞.实验验证,论文提出的方法能有效去除光照变化、阴影等环境因素的影响,提高车辆检测的准确度和识别率.
混合高斯模型;相邻帧差法;邻域背景差分法;空洞
交通给人们带来了便利,也带来了一系列的问题.为了预防和解决引发的交通事故,需要对运动车辆进行实时监控.目前针对运动目标的检测方法非常多,基本方法主要有光流法[1]、帧间差分法[2]、背景差分法[3].由于光流法的计算量大,对噪音比较敏感且不具备实时性[4];帧间差分法在运动目标提取过程中,所提取的目标受帧间间隔的影响而造成提取不完整,且容易造成空洞等现象[5];背景差分法需要对模型的建立和更新,同时对光照等外界条件敏感,这些都是背景差分法需要解决的问题[6-7].现在大多数方法都是集合一种或多种方法的优点来对检测方法进行改进和组合.文献[8]提出的混合高斯背景模型(GMM),很好地解决了复杂背景下的前景提取;文献[9]提出混合高斯背景模型与三帧差法结合的运动目标检测算法,通过面积法对检测结果进行分析;文献[10]提出基于时空背景差的运动目标检测算法融合时间、空间信息的背景差分,得到真实的种子点;文献[11]在时空背景差分法的基础上,加入跟踪带运动种子补偿,很好地解决了检测过程中出现的空洞问题.
在高速公路这一条件下,对车辆目标进行检测的同时,需要解决环境的干扰.所以解决的问题包括:高速公路场景中光照变化、场景中树叶等晃动带来的干扰及检测过程中带来的空洞现象[12].本文通过时空背景差分法提取前景目标来更好地去除扰动,并在此基础上添加阴影消除,及运动种子补偿,以得到更好的检测效果,为车辆的跟踪做好铺垫.
1 传统的运动目标检测算法
传统的运动目标检测算法存在着需要改进的地方,如光流法计算量大、算法复杂、可用性不强,同时传统的方法对光照、阴影、背景扰动等环境因素比较敏感,在检测过程中出现比较多的噪声[13].
1.1基于混合高斯模型的背景差分法当高速公路中背景物体发生反复运动时,如树叶的晃动,都可能将其判断为检测目标.混合高斯模型同时运用多个单高斯模型对每个像素进行建模,组成k个高斯分布,通过对高斯分布的参数的更新,更新背景,然后判断背景像素和前景像素[14-15],这样可以有效去除背景差分法中背景扰动带来的干扰(k值一般取3~7).假设由k个高斯分布来描述每帧图像像素点的像素值分布,其中,h(Xt,μi,t,li,t)为高斯分布密度函数,μi,t为高斯分布的均值,li,t为高斯分布方差,Xt为每个像素点[5].通过(1)式将概率记为

其中ωi,t为i个高斯分布的权重.
背景更新,判断新获取的每一帧图像像素值与建立的k个高斯分布中的某一个是否匹配[13],计算公式为

就权值而言,与像素值相匹配的高斯模型,需要相应地加大其权值;对于不能匹配的高斯分布,减小模型的权值.权值更新应按照(3)式,其中α为自定义的学习率,其值与背景模型的更新速度有关,且应该在[0,1]之间.

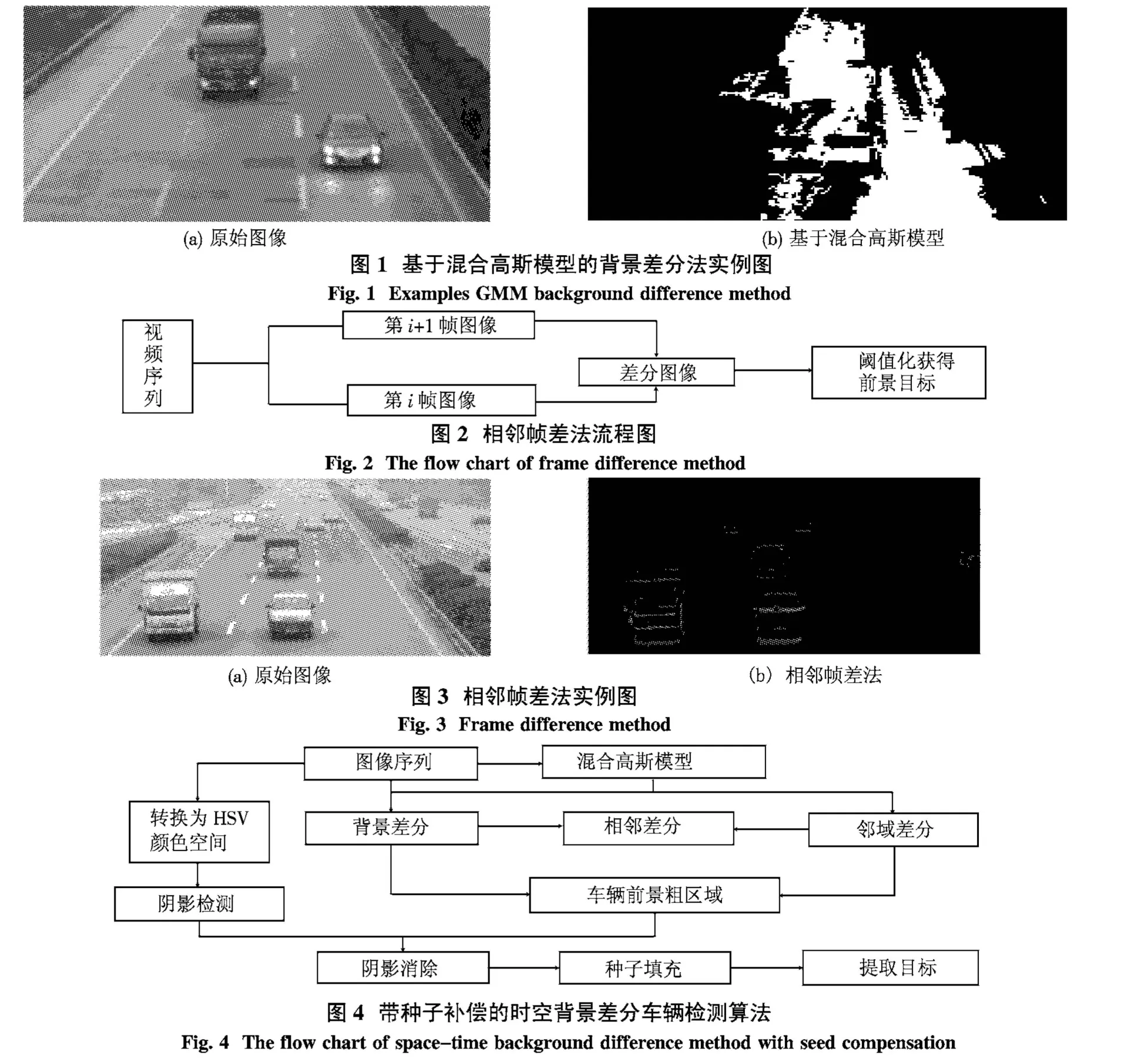
图3为相邻帧差法得到的前景目标车辆,可以看出相邻帧差法对光照等环境因素的影响不敏感,提取的运动车辆不够清晰,只能看见车辆的轮廓,同时相邻帧的时间间隔可能会对前景目标的提取有一定的影响.
2 带种子补偿的时空背景差分车辆检测算法
根据传统的运动目标检测算法的缺陷,本文选择一种或多种互补的算法结合各算法的优点消除影响因素,从而提高运动车辆检测率.由于背景差分法对环境因素比较敏感,帧间差分法所检测出的目标车辆出现空洞且检测效果依赖于帧间间隔,通过两者相结合的方式可以互补不足,比较好地提取出前景目标车辆.因此,本文采用带种子补偿的时空背景差分车辆检测算法.
首先通过时空背景差分法进行车辆的初步检测:获取视频图像序列,利用混合高斯模型获取背景图像并采用背景差分法得到前景区域;然后将前后2帧所得到的前景区域再进行帧间差分运算,在此基础上进行邻域差分,通过背景差分与邻域差分对比得出最终的前景粗区域.再通过HSV颜色模型图像的亮度、饱和度变化来判断阴影,并对阴影的像素值进行修改以此消除阴影.最后通过建立邻域小窗口,进行人工种子填充等后期处理,得到最终的前景检测目标车辆.带种子补偿的时空背景差分车辆检测算法流程如图4所示.
基于混合高斯模型背景差分法的实验结果如图1所示.由图1可以看出,运用该方法受光照等外界的影响,噪声较多,车辆目标检测结果不理想.基于混合高斯模型的检测算法虽然去除了轻微晃动的背景干扰,但是对光照、天气变化的环境下引起的噪声还需要进一步的改进.
1.2相邻帧差法相邻帧差法[2]主要是通过获取视频中比较合适的帧间间隔的相邻帧作差分运算,得到检测目标的外部轮廓.该方法运算简单容易实现,原理如下:将视频序列中的第i+1帧作为当前帧图像,将第i帧作为前一帧图像,计算当前帧和前一帧的差值,与阈值进行对比,小于阈值则判定为前景点,如图2所示.
2.1基于时空背景差分法时空背景差分是通过背景差分、帧间差分和邻域差分方法相结合的方式得到运动种子点,包含运动种子点的运动连通区域被看作检测的目标区域[10].时空背景差分法的算法流程如图5所示.
邻域背景差分运动检测,主要是通过邻域信息来进一步避免晃动的树叶等动态背景造成的干扰.邻域背景差分公式为
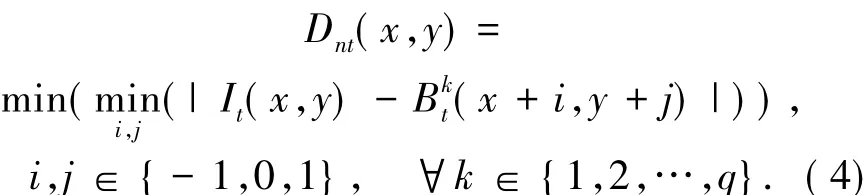
邻域背景差分的运动目标检测只针对已经检测出的前景区域,在判断前景区域时,需要判断Dnt的值,当Dnt大于事先确定的阈值时,判断为前景区域.
2.2阴影消除在光照下,车辆检测很容易受到阴影的影响而把阴影误判为前景目标,消除阴影对目标检测的正确性有很大的影响.而在光照变化下,颜色特征变化相对比较稳定,所以可以根据颜色特征检测阴影[16].当路面被阴影覆盖时,可以看出被覆盖的区域比较暗,主要是亮度带来的变化,同时饱和度有所降低,而所对应的颜色值基本没有变化.考虑将图像从RGB颜色模型转化为HSV颜色模型以得到具体的颜色参数,并通过(5)式判断是否为阴影,
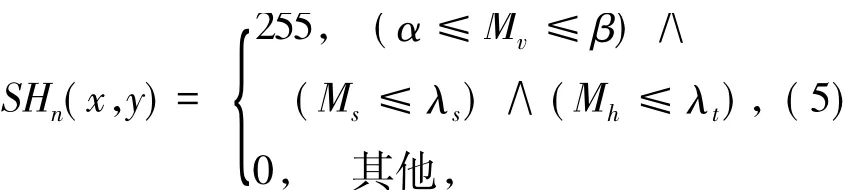
式中,Mv是当前帧和背景帧亮度的比值,Ms为当前帧与背景帧饱和度的差值,Mh为当前图像与背景图像色度值的差值的绝对值.当所检测像素点满足3个条件时,则判断该像素点为阴影,并把像素值改为255.在(5)式中α与β的值需要在(0,1)之间,参数λs小于0,4个参数的取值都是通过不同场景选取.
2.3种子补偿在某些情况下,运动目标被分割出来后,由于帧间差分、背景差分可能出现拉伸、空洞等现象.同时当目标运动很慢时,常常检测不出物体.为了避免误检、漏检,本文提出了采用种子补偿的方法.在阴影消除后的目标区域内加入跟踪小窗口ω,对前景区域进行种子填充,计算公式为
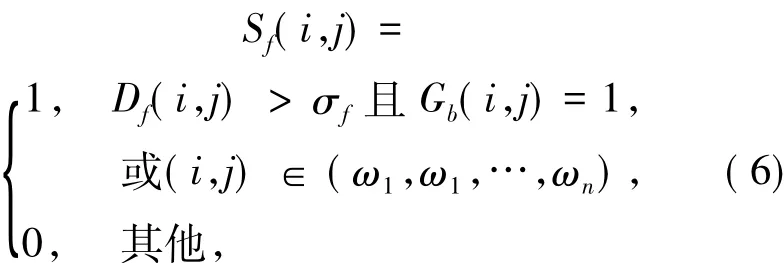
其中,Df为相邻帧的差值,σf为邻帧差分法中的阈值,Gb为混合高斯模型背景差分法检测出的前景目标.检测出的前景区域经过种子填充之后,可以看出前景区域的轮廓变得更加清晰.如图6所示为去除阴影后,与种子补偿的对比.明显可以看出去除阴影、加上种子补偿后车辆的轮廓更加清晰.
3 高速公路车辆检测方法
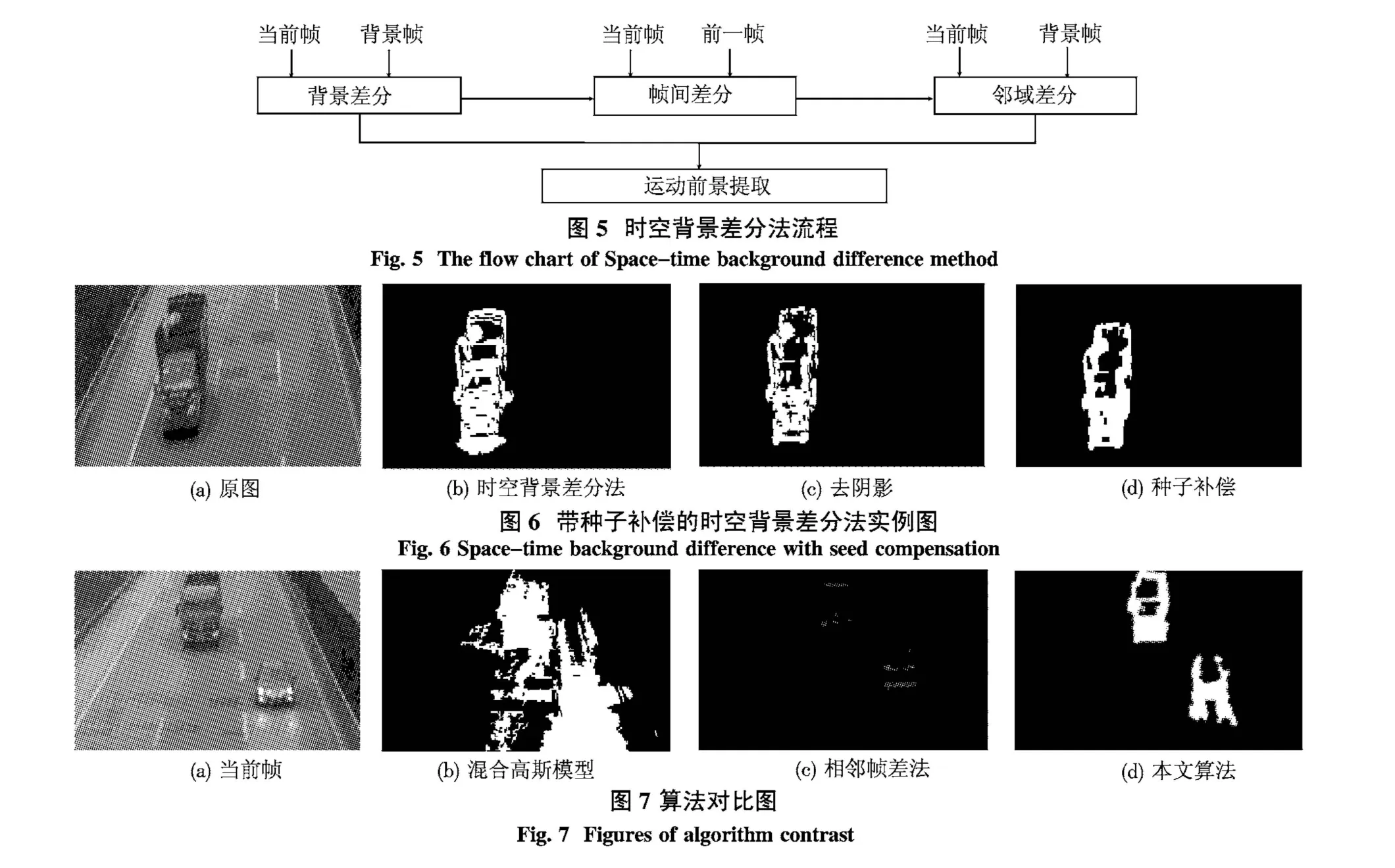
图7为本文算法与其它算法的对比实例.图7中,(b)图为基于混合高斯模型的背景差分法,(c)图为相邻帧差法,(d)图为本文算法.背景差分法受环境因素影响比较大,目标区域噪声比较多;相邻帧差法检测的车辆目标区域比较暗,产生比较大的空洞,但车辆的基本轮廓能够在图中体现;而本文算法检测噪声较小,可以比较清晰地看到检测目标以及车辆的轮廓.
另外,本文用大量视频图像对算法进行实验,主要分为一般情况和车辆密集情况下的车辆检测,并记录存在漏检视频图像帧数,计算车辆检测中正确错误率,分析错误原因.如表1所示,可以看出本文算法具有较好的检测效果.
在实验过程中出现的漏检主要是由于车辆颜色与地面具有高度的相似性,以及在前车对后车的遮挡等原因导致.特别是车辆密集情况,除遮挡引起漏检外,由于车辆间距小,粘连情况比较严重,有可能直接导致2个检测目标检测为一个检测目标.

表1 实验测试结果Table 1The experimental results of test
4 结语
本文方法主要是针对高速公路的车辆检测,本文算法应用于场景中可去除背景扰动、光照变化等环境因素的影响,并能有效检测并消除检测区域的阴影,同时减少了检测过程中出现的空洞,甚至丢失现象.然而本文算法还存在一定的不足,例如,在检测过程中没有处理运动目标遮挡及粘连的情况,针对该问题将在后续研究中进一步修改完善.
参考文献
[1]袁国武,陈志强,龚健,等.一种结合光流法与三帧差分法的运动目标检测算法[J].小型微型计算机系统,2013,34(3): 668-671.
[2]SHENG H,LI C,WEI Q.An approach to motion vehicle detection in complex factors over highway surveillance video[C]//International Joint Conference on Computational Sciences Optimization,2009,1(3):520-523.DOI:10.1109/cso.2009.43.
[3]卢章平,孔德飞,李晓蕾,等.背景差分与三帧差分结合的运动目标检测算法[J].计算机测量与控制,2013,21(12):3315-3318.
[4]杨国亮,王志良,牟世堂.一种改进的光流算法[J].计算机工程,2006,15(8):187-188.
[5]CHENG F C,HUANG S,RUAN S J.Illumination-sensitive background modeling approach for accurate moving object detection[J].IEEE Transactions on Broadcasting,2011,57(4):794-801.
[6]李加佳,彭启民.适应光照突变的运动目标检测算法[J].计算机辅助设计与图形学学报,2012,24(11):1405-1409.
[7]WANG L,WANG L,WEN M.Background subtraction using incremental subspace learning[C]//Proceedings of the International Conference on Image Processing,2007,9(5):45-48.
[8]STAUFFER C,GRIMSON W.Adaptive background mixture models for real-time tracking[J].Computer Vision and Pattern Recognition,1999,2:246-252.
[9]张文,李榕,朱建武.基于混合高斯模型与三帧差分的目标检测算法[J].现代电子技术,2012,35(8):57-60.
[10]肖梅,韩崇昭,张雷.基于时空背景差的运动目标检测算法[J].计算机辅助设计与图形学学报,2006,18(7):1044-1048.
[11]王涛,熊运余.基于时空背景差的带跟踪补偿目标检测方法[J].计算机应用,2010,30(1):58-60.
[12]周欣,黄席樾.基于卡尔曼滤波的车辆跟踪技术[J].四川师范大学学报(自然科学版),2008,31(6):766-769.
[13]郑秀清,何坤,张健.基于Prewitt算子的TV图像去噪算法[J].四川师范大学学报(自然科学版),2013,36(3):456-462.
[14]华媛蕾,刘万军.改进混合高斯模型的运动目标检测算法[J].计算机应用,2014,34(2):580-584.
[15]付诚,贾年.基于混合高斯模型和GPU的车辆闯红灯快速检测算法及实现[J].西华大学学报(自然科学版),2012,31(2):9-13.
[16]王伟,李红波,吴渝.一种运动个目标阴影轮廓的两步检测算法[J].广西师范大学学报(自然科学版),2010,28(3):165-169.
[17]张红颖,胡正.CenSurE特征和时空信息相结合的运动目标检测[J].光学精密工程,2013,21(9):2452-2463.
[18]华梓铮,华泽玺.结合NSCT低高频特征的图像边缘检测算法[J].四川师范大学学报(自然科学版),2014,37(4):612-617.
[19]XIONG C,FAN W Y,LI Z X.Traffic flow detection algorithm based on intensity curve of high-resolution image[C]//Proceedings of the 2nd International Conference on Computer Modeling and Simulation,2010,12(2):159-162.DOI:10.1109/iccms.2010.405.
Highway Vehicles Detection Algorithm Research Based on the Space-time Background Difference with Seed Compensation
ZHANG Xujin1,LIAO Xuehua1,GUO Min2,REN Chunhua1
(1.College of Computer Science,Sichuan Normal University,Chengdu 610066,Sichuan; 2.Institute of Information Science and Technology,Southwest Jiaotong University,Chengdu 610031,Sichuan)
This paper proposes a method of particular scene of highway vehicles detection algorithm based on the space-time background difference with seed compensation.Firstly,considering the particularity of highway scene,we used GMM background difference,frame difference method and the neighborhood background subtraction to remove the scene disturbance and some of the effects of environmental factors.And then,we determined the position of the shadow through HSV color space and eliminate shadows.Finally,we used the tracking seed compensation to remove the voids.By these experiments,we proved the highway vehicle detection method can effectively eliminate the influence of illumination change,shadows and other environmental factors,and thus improve the accuracy of vehicle detection and recognition rate.
GMM;frame difference;neighborhood background subtraction;empty
TP391
A
1001-8395(2016)03-0456-05
10.3969/j.issn.1001-8395.2016.03.027
(编辑李德华)
2015-07-01
四川省科技厅科技支撑项目(2012GZX0090和2014GZX0002)
*通信作者简介:廖雪花(1976—),女,副教授,主要从事计算机网络与信息系统和模式识别的研究,E-mail:liaoxuehua@163.com
猜你喜欢
湖南理工学院学报(自然科学版)(2022年1期)2022-03-16
文苑(2020年11期)2020-11-19
中国诗歌(2019年6期)2019-11-15
小天使·二年级语数英综合(2019年4期)2019-10-06
小学生学习指导(低年级)(2019年6期)2019-07-22
中学生数理化·八年级物理人教版(2017年11期)2017-04-18
数学大王·中高年级(2016年4期)2016-05-14
物探化探计算技术(2015年2期)2015-02-28
四川师范大学学报(自然科学版)(2015年2期)2015-02-28
振动工程学报(2014年2期)2014-03-01