
基于Willans Line的双轴驱动混合动力越野车实时能量管理
2016-06-27 04:22邱利宏钱立军王金波
中国机械工程 2016年11期
阚 萍 邱利宏 钱立军 王金波
1.安徽交通职业技术学院,合肥,230001 2.合肥工业大学,合肥,2300093.克莱姆森大学国际汽车研究中心,格林维尔,29607
基于Willans Line的双轴驱动混合动力越野车实时能量管理
阚萍1邱利宏2,3钱立军2王金波2
1.安徽交通职业技术学院,合肥,2300012.合肥工业大学,合肥,2300093.克莱姆森大学国际汽车研究中心,格林维尔,29607
摘要:为了实现混合动力越野车的实时能量管理,建立了其动力系统的动力学模型,提出利用发动机和电机的Willans Line 模型,建立基于WL-ECMS能量管理控制方法的发动机和电机最优输出功率模型。硬件在环试验结果表明,基于WL-ECMS的控制方法可以实现混合动力越野车基本的能量管理,车速跟随误差在合理的范围内,与基于ECMS的能量管理控制方法相比,其百公里油耗仅提高3.03%,与基于规则的能量管理控制方法相比,其百公里油耗低12.07%,且每一个时间步长程序的相对运行时间由基于ECMS方法的100下降到1.65,与基于规则方法的1.07相当,实现了混合动力越野车实时能量管理。
关键词:混合动力越野车;实时能量管理;威兰斯线; 等效燃油消耗最小策略;硬件在环
0引言
混合动力汽车的能量管理控制策略具有非线性、多变量、时变等特点,直接影响整车的动力性、经济性、舒适性及排放[1-3]。
基于优化的能量管理控制方法是当前的研究热点和难点。在基于优化的控制方法中,动态规划可以获得理论上的全局最优解,但动态规划程序结构十分复杂,而且采用动态规划进行在线优化需要结合模型预测算法获取循环工况[4-5]。然而模型预测和动态规划的组合算法计算时间成本较高,无法实现实时控制。为此,学者们重点研究了可以取得近似全局最优解的等效燃油消耗最小原理和庞特亚金极小值原理[6-7]。相对于动态规划而言,这两种算法执行效率比较高,节省了计算的时间成本,然而车载单片机的运算能力有限,依然无法满足实时控制的要求。
针对以上不足,本文提出一种基于Willans Line等效燃油消耗最小值原理(Willans Line-equivalent consumption minimization strategy,WL-ECMS)的能量管理控制方法,建立了混合动力越野车在纯电动模式和混合动力模式下发动机和电机最优输出功率模型,并将基于搜索的ECMS简化为基于规则的形式,实现了双轴驱动混合动力越野车的实时能量管理。
1混合动力越野车动力系统模型
本文研究的双轴驱动混合动力越野车结构简图见图1。该混合动力越野车采用分时四驱的动力系统,前后桥分别由发动机和电机驱动。其中,前桥动力系统包含发动机及其控制器、液力变矩器以及6速自动变速箱及其控制器;后桥动力系统包含驱动电机及其控制器、电机减速器。另外,后桥参与驱动时,由动力电池通过逆变器1给驱动电机供电;动力电池电量低时,由发动机带动发电机通过逆变器2给动力电池充电;低压电池通过DC-DC与动力电池相连,为整车控制器及动力部件控制器等供电。
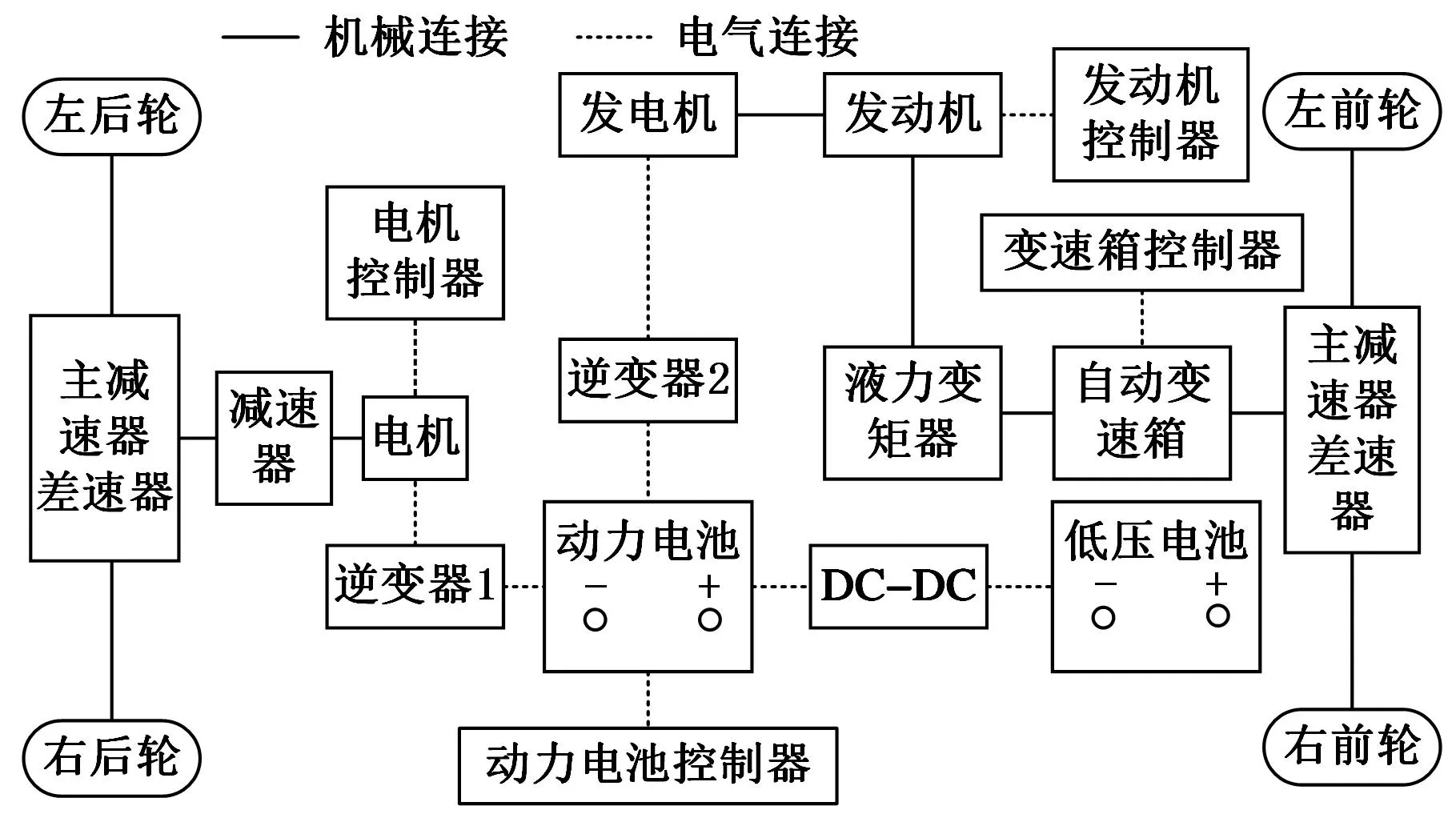
图1 混合动力越野车结构简图
1.1发动机模型
本文研究的混合动力越野车采用的发动机是涡轮增压V6汽油机,排量为3.4 L,额定功率为154 kW,额定转速为5200 r/min,额定扭矩为283 N·m。发动机的动态输出扭矩用下式表示[8]:
(1)
式中,Tes和Te为发动机的稳态和动态输出扭矩;ne为发动机转速;αe为节气门开度;ξe为发动机二阶系统阻尼比;ωne为发动机固有频率;s为复频率。
1.2电机模型
本文研究的混合动力越野车采用的驱动电机为永磁同步电机,峰值扭矩为180N·m,峰值转速为11kr/min,峰值功率为108kW,额定功率为50kW。其动态输出扭矩用下式表示[9]:
Tm=
(2)
式中,Tm和Tmd分别为电机的动态输出扭矩和期望输出扭矩;Tm-max为电机的峰值扭矩;ξm为电机二阶系统阻尼比;ωnm为电机固有频率。
1.3动力电池模型
本文研究的混合动力越野车采用的动力电池为磷酸铁锂电池,额定容量为10A·h。动力电池模型用下式表示[10]:
(3)
其中, Ibat、Voc、Pbat、Rbat分别为动力电池电流、开路电压、输出功率及内阻;Sbat、Qbat分别为动力电池荷电状态和额定容量。Voc和Rbat均为动力电池荷电状态Sbat以及温度T的函数,本文采用基于试验数据查表得到。
1.4液力变矩器模型
本文研究的混合动力越野车采用的液力变矩器模型[11]用下式表示:
(4)
式中, MB和MT分别为泵轮和涡轮传递的扭矩;ωB和ωT分别为泵轮和涡轮的角速度;Q和ρ分别为介质液体流量和密度;RB、RT、RD分别为液力变矩器轴心到泵轮、涡轮、导轮出口的半径;βB、βT、βR分别为液力变矩器泵轮、涡轮、导轮的叶片角;AB、AT、AD分别为液力变矩器泵轮、涡轮、导轮出口流道的有效横截面积。
1.5变速箱模型
本文研究的混合动力越野车采用6速自动变速箱,1~6挡速比分别为4.148、2.370、1.556、1.155、0.859、0.686。自动变速箱模型用下式表示[12]:
(5)
式中,TAT_i、TAT_o分别为自动变速箱输入、输出轴传递的扭矩;TAT_in、TAT_out分别为自动变速箱输入、输出扭矩;Jti、Jto分别为离合器输入端及输出端转动惯量; igi为自动变速箱i挡速比;ηi为自动变速箱i挡效率;ωAT_in、ωAT_out分别为自动变速箱输入、输出转速。
其中,自动变速箱的效率是输入扭矩以及传动比的函数,传动比是请求功率及车速的函数,均基于试验数据查表得到。
1.6整车纵向动力学模型
本文研究的混合动力越野车整车纵向动力学模型用下式表示[13]:
(6)
式中,Ft为驱动力;δ为旋转质量换算系数;m为整车整备质量;f为滚动阻力系数;CD为空气阻力系数;θ为道路的坡度角; Af为混合动力汽车迎风面积; igm为电机减速器速比;iof和ior分别为前后桥主减速器速比;ηf和ηr分别为前后桥动力系统总效率;r为车轮滚动半径;v和v0分别为当前时刻和下一时刻的车速。
本文研究的混合动力越野车,其他基本参数如表1所示。

表1 混合动力越野车基本参数
2基于WL-ECMS的能量管理
等效燃油消耗最小原理(ECMS)的本质是将电机消耗的电能通过等效因子转换为等效油耗,然后搜索目标函数在控制变量可行域内网格点对应的最小值(编程时一般采用min函数),此最小值即为目标函数的最小值,对应目标函数最小值的控制变量即为最优控制变量。
ECMS的优化原理可以用下式表示:
(7)
对于混合动力汽车的能量管理,假设控制变量为发动机扭矩和变速箱速比,目标函数为汽车油耗,则ECMS的本质即为搜索可行域中发动机扭矩点和变速箱速比点组成的矩阵中对应油耗最小值,以及此时对应的发动机扭矩及变速箱速比,这种搜索方式在实际应用时相当于插值和查表。相对于在全局中搜索最优控制变量序列的动态规划而言,ECMS可以在保证获得近似全局最优解的基础上大大节省计算的时间成本。然而,在每一个采样时刻,通过对一个无序的矩阵空间先插值再查表的方式搜索可行域中的最小值,依然需要消耗大量的计算时间,而且随着矩阵维数的增加,计算时间成本也会成倍增加,而整车控制器的浮点运算能力有限,这也是导致ECMS无法实现实车应用的根本原因之一。
为了实现混合动力汽车近似的实时最优能量管理,本文提出一种简化的ECMS控制方法,即WL-ECMS。WL-ECMS的基本原理是利用发动机和电机的Willans Line模型[14],将依赖于插值和查表的ECMS搜索方法近似规则化,从而将基于搜索的ECMS算法简化为与基于规则类似的算法,大大降低了程序的复杂性以节省计算的时间成本。
发动机Willans Line模型如下式所示:
Pef=aePem+be
(8)
式中,Pef和Pem分别为燃油燃烧功率和发动机有效功率;ae和be分别为代表发动机指示效率的倒数以及摩擦损失的回归系数,均为发动机转速的函数。
电机的WillansLine模型如下式所示:
(9)
其中,Pme、Pmm分别为动力电池功率及电机有效功率;am1和bm1分别为电机有效功率大于零时的回归系数;am2和bm2为电机有效功率小于零时的回归系数。am1、bm1、am2、bm2均为电机转速的函数。
为了使ECMS表达式与发动机和电机的WillansLine模型表达式的形式保持一致,本文引入等效电压的概念,并将ECMS的原理转换为如下等效功率表达式:
Peq=Pef-μIbat
(10)
μ=λHg
式中,Peq为等效功率;μ为决定动力电池单位电流等效功率的等效电压;λ为等效因子;Hg为燃油的热值。
大多数学者在研究ECMS时将等效因子视为常数获得了良好的燃油经济性,但在不同的工况下、同一个工况的不同时刻以及动力电池充电或放电时,等效因子的最优取值均不一样,因此有必要设计一种可变的等效因子以适应不同工况的需求,提高混合动力汽车的燃油经济性。关于自适应等效因子的计算,有很多基于优化的控制算法可以实现,但是复杂的计算方法势必增加计算的时间成本,而本文研究的重点是简化ECMS,在保证燃油经济性的基础上实现实时控制。因此,本文采用下式所示的迭代表达式计算自适应等效因子[15]:
(11)
式中,a0(t)为t时刻汽车载荷曲线的近似斜率;t0、tf分别为当前更新时刻和将来预测时刻。
基于动力电池的内阻模型,电机消耗的功率可以用下式表示:
(12)
在纯电动模式下,电机输出的有效功率Pmm大于零,由式(9)和式(12)得到动力电池电流表达式:
(13)
纯电动模式下,混合动力汽车由电机单独驱动,发动机的输出功率为零。由式(10)和式(13)得到纯电动模式下的等效功率:
(14)
式中,Peq-EV、Preq分别为混合动力汽车纯电动模式下的等效功率以及需求功率。
混合动力模式下,发动机和电机共同提供整车需求功率,即
Preq=Pem+Pmm
(15)
根据式(8)~式(10)、式(12)、式(15)得到混合动力模式的等效功率消耗:
(16)
式中,Peq-HEV为混合动力汽车在混合动力模式下的等效功率;R1和R2分别为动力电池内阻和回归系数的线性函数;P1和P2分别为汽车需求功率和回归系数的线性函数;Vm1和Vm2分别为动力电池开路和回归系数的线性函数。
在满足动力电池Sbat及发动机和电机转速、转矩范围约束的条件下,由式(16)可知,混合动力模式下的最小等效功率如下式所示:
(17)
式中,Peq-HEVmin为混合动力模式下的最小等效功率。
混合动力模式等效功率取得最小值时对应的动力电池最优电流如下式所示:
(18)
根据式(12)和式(18)得到混合动力模式下最优电机消耗功率表达式:
(19)
结合式(9)和式(19),得到电机最优有效输出功率的表达式:
(20)

纯电动模式和混合动力模式均为稳态模式,混合动力汽车的驱动模式在纯电动模式和混合动力模式之间切换时,整车需求功率的临界点即为纯电动模式需求功率与混合动力模式需求功率相等的点,临界点的整车需求功率根据式(14)和式(16)求解。当整车需求功率小于临界功率时,混合动力汽车的驱动模式为纯电动模式;反之,则为混合动力模式。
在任意采样时刻,基于WillansLine的混合动力汽车驱动模式能量管理控制策略可以用下式表示:
(21)
式(21)将基于ECMS的能量管理控制策略简化为与基于规则类似的控制策略。为验证本文提出的基于WL-ECMS的能量管理控制策略的性能,本文建立了基于ECMS和基于规则的控制策略模型。基于ECMS的控制原理如式(7)所示,基于规则的控制方法将混合动力汽车划分为纯电动模式、发动机驱动模式(包含行车充电模式)以及混合动力模式,以整车需求转矩及动力电池Sbat为主要控制变量,以发动机和电机的工作区间为控制目标进行驱动模式的划分。当动力电池Sbat较高且整车需求转矩小于发动机最优工作转矩区间的下限时,整车驱动模式为纯电动模式;当动力电池Sbat较高且整车需求转矩大于发动机最优工作转矩区间上限时,整车驱动模式为混合动力模式;其余情况整车由发动机单独驱动。
3硬件在环试验结果及分析
为了测试本文提出的基于Willans Line的混合动力越野车能量管理策略控制效果及其实时性,将控制策略进行了在线的硬件在环试验[4],试验工况为美国城市工况(FUDS),试验时间为1400 s,试验步长为0.1 s,初始Sbat设置为0.65,试验平台为dSPACE。本次试验采用dSPACE MicroAutoBox作为整车控制器,动力电池及电机采用实物,其余部件采用dSPACE模拟。将基于MATLAB/Simulink建立的整车控制模型及部分动力系统模型编译为可执行代码后下载到AutoBox中,连接模拟信号及实物CAN接口后,开始进行硬件在环试验。
图2~图4为基于WL-ECMS的能量管理试验结果。图2为FUDS工况下的车速跟随曲线,由图2可知,在基于WL-ECMS的能量管理控制策略下,汽车的实际输出车速与工况车速吻合良好。图3为与实际车速对应的整车需求扭矩曲线,此扭矩曲线的值由混合动力汽车模型中的PID模块根据工况车速和实际车速的误差计算得到。图4a~图4d是FUDS工况下混合动力汽车各动力部件的工作情况。由图4可知,混合动力汽车总的需求扭矩等于发动机和电机所提供的扭矩之和。发动机和电机的输出功率与整车在FUDS工况下的需求功率对应。当需求功率较大且Sbat较高时,混合动力汽车进行双轴混合动力驱动;当需求功率较小且Sbat较低时,混合动力汽车由发动机驱动并将带动发电机为动力电池充电。当需求扭矩为负值时,混合动力汽车进行制动且主要由驱动电机再生制动提供制动力矩。另外,发动机和电机的输出功率情况与动力电池Sbat的变化趋势保持一致,Sbat被控制在合理的范围内,且在整个循环工况下,没有出现频繁的模式切换。由此可知,基于WL-ECMS的能量管理控制方法实现了本文研究的双轴驱动混合动力越野车基本的能量管理。
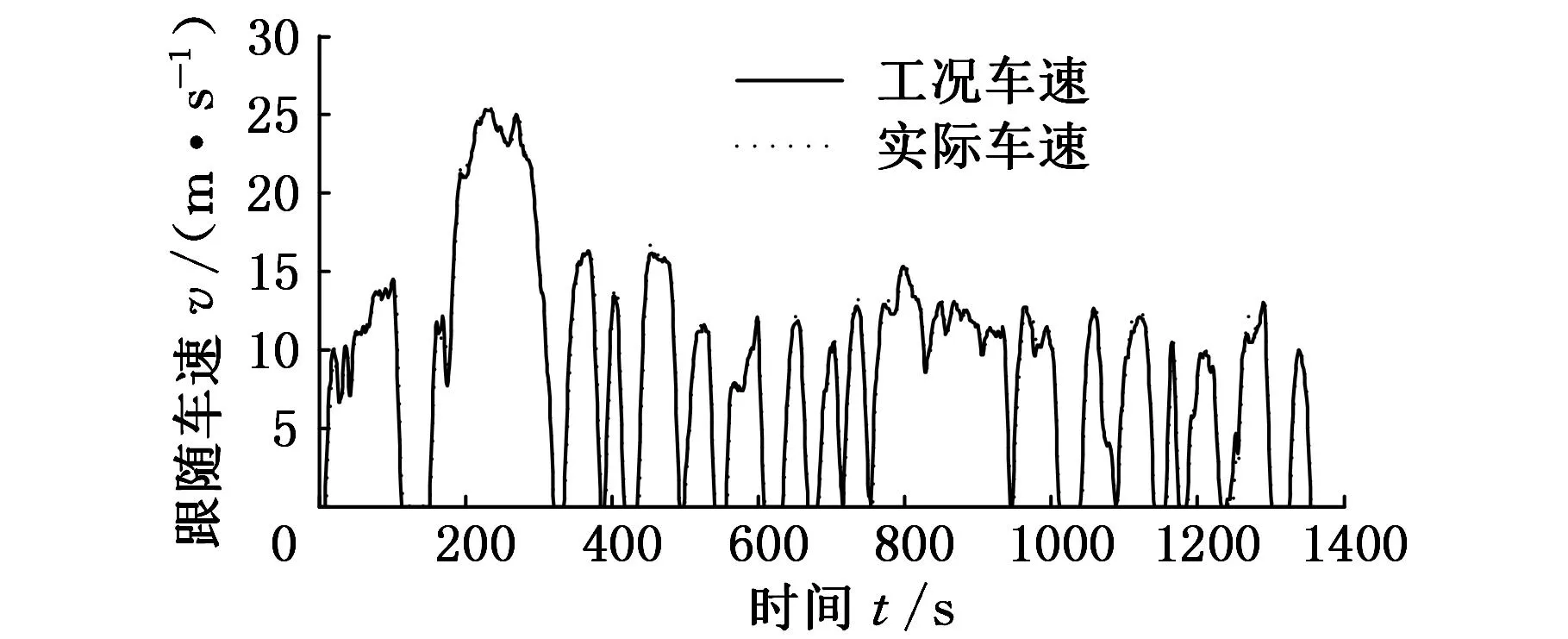
图2 车速跟随曲线
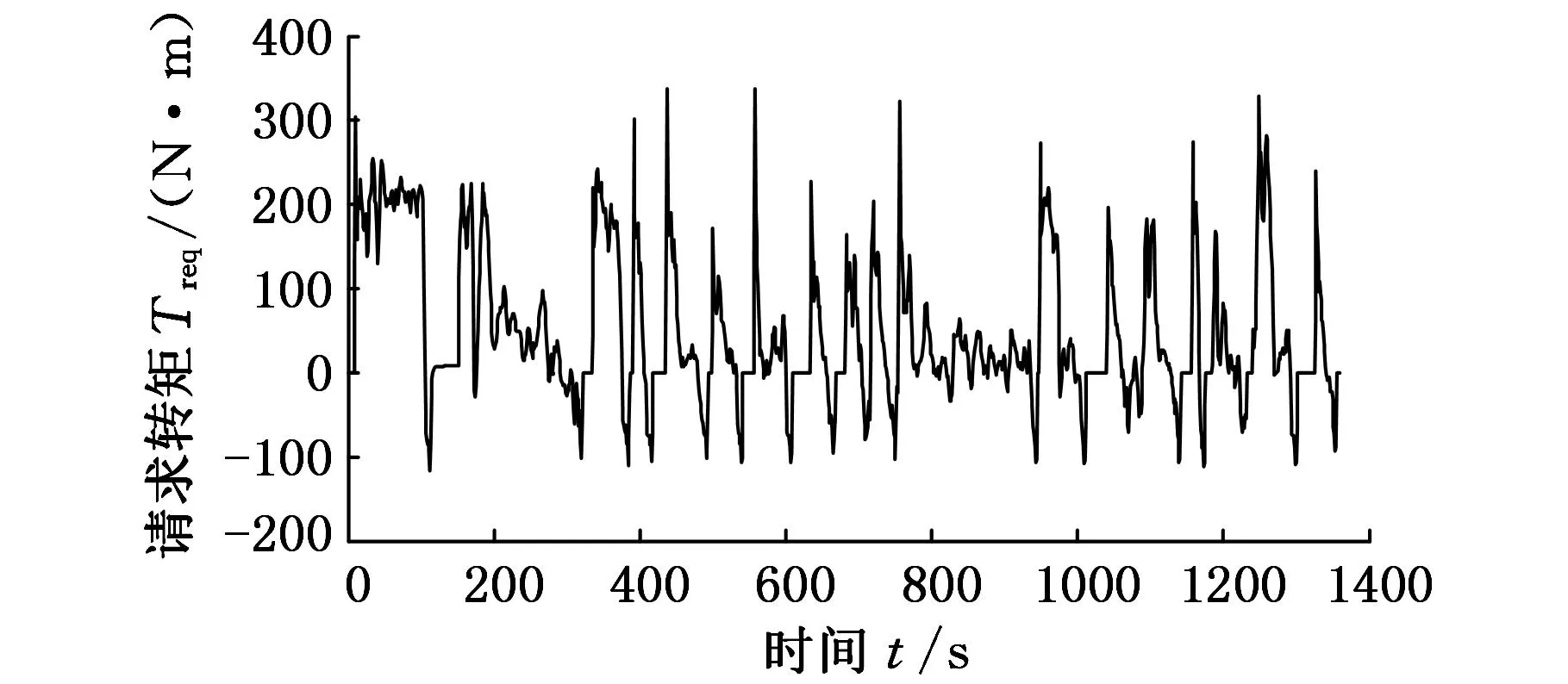
图3 需求扭矩曲线
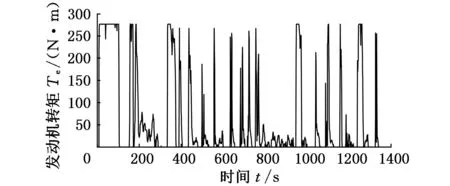
(a)发动机输出扭矩曲线

(b)电机输出扭矩曲线
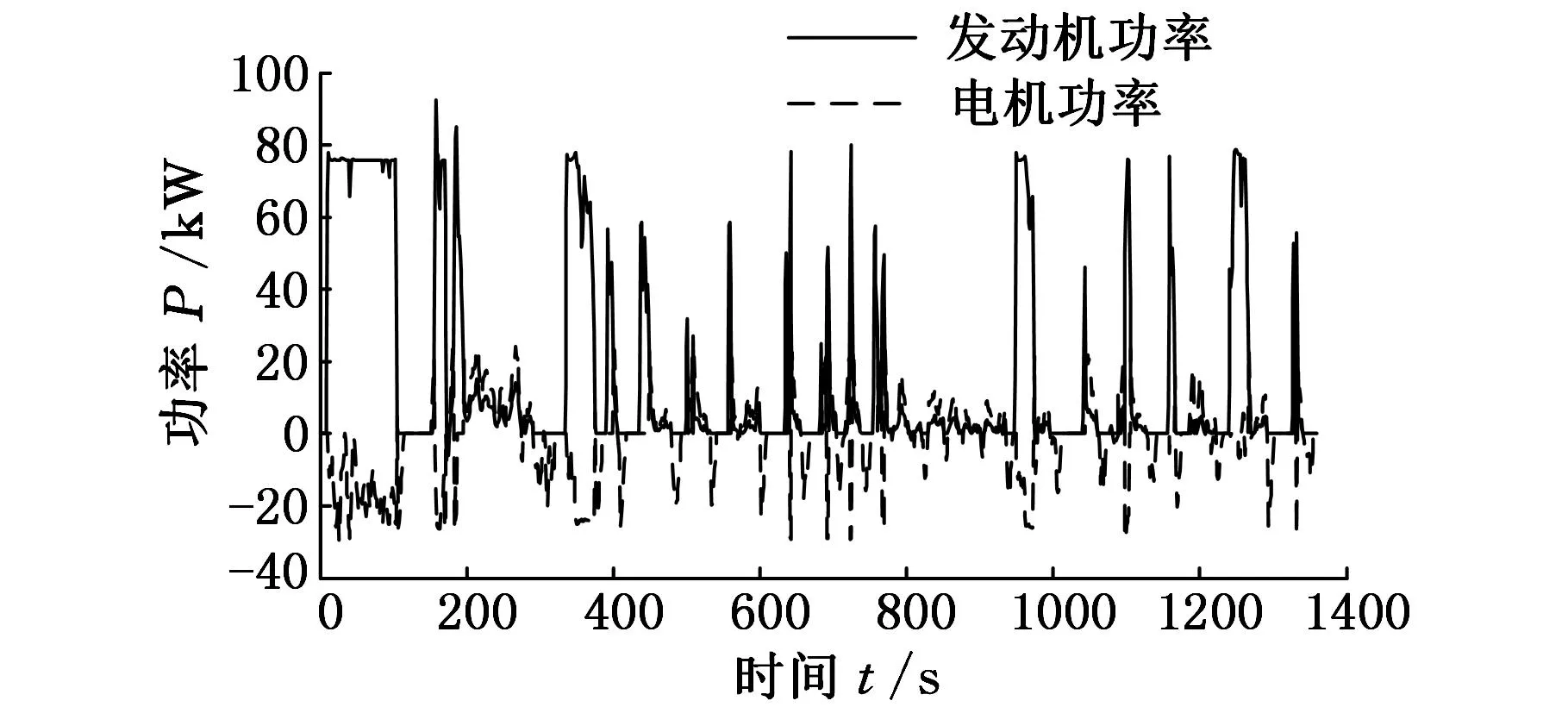
(c)功率分配曲线
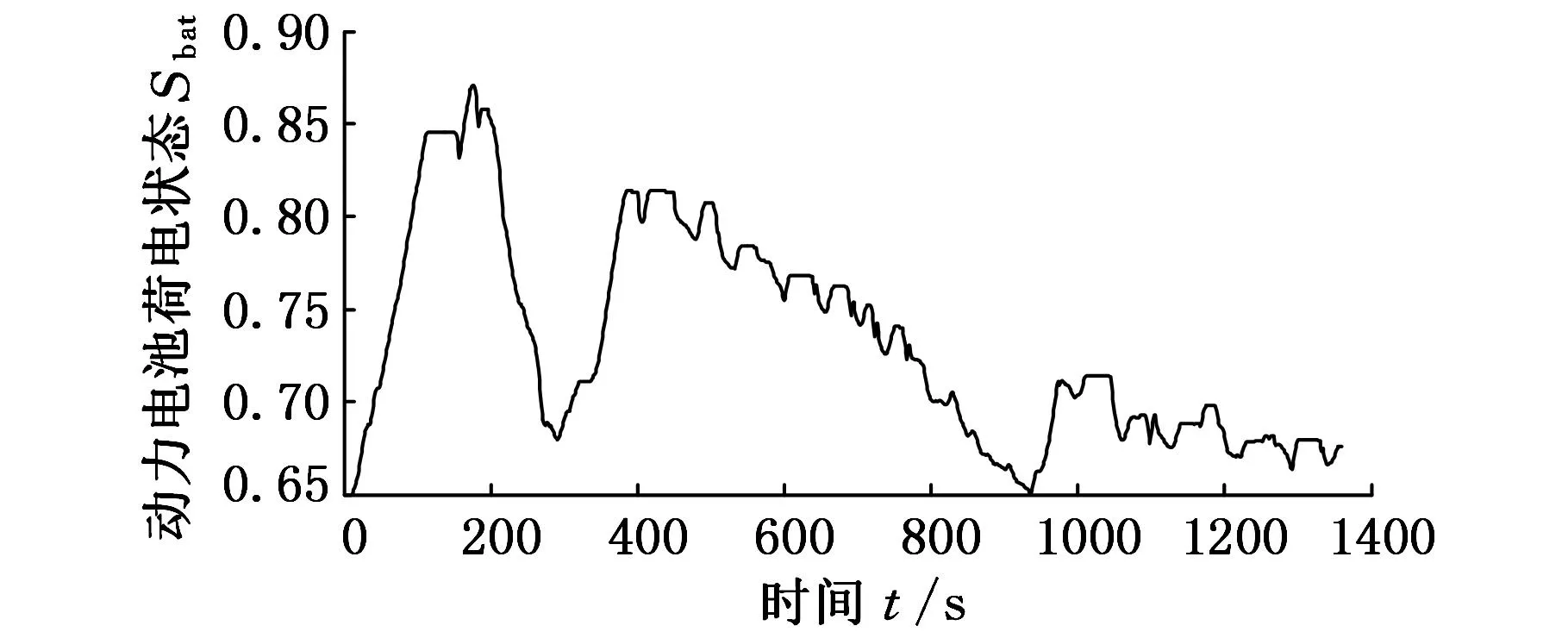
(d)动力电池荷电状态图4 采用基于WL-ECMS能量管理控制方法时的动力部件工作情况
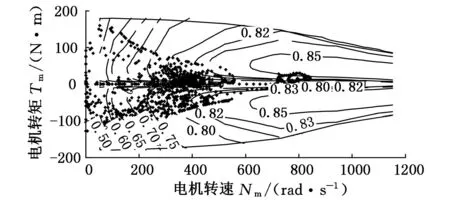
图5和图6分别为FUDS工况下分别采用基于WL-ECMS和ECMS能量管理控制方法时,混合动力汽车发动机和电机工作点的对比。由于基于WL-ECMS的控制方法采用了Willans Line模型对发动机和电机进行了简化,而且在构建基于Willans Line的回归模型时,有限的实验参数限制了模型的精度,因此采用基于WL-ECMS能量管理控制方法时的发动机和电机的工作点在低效率区域比采用基于ECMS能量管理控制方法时发动机和电机的工作点在低效率区域的多。其中,基于WL-ECMS能量管理控制方法的发动机和电机的平均效率分别为25.8%和74.6%,基于ECMS能量管理控制方法的发动机和电机的平均效率分别为27.2%和76.3%,因此基于WL-ECMS能量管理控制方法总体上控制效果良好。
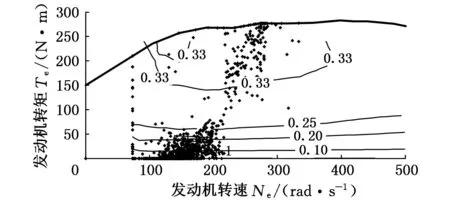
(a)基于WL-ECMS能量管理控制方法的发动机工作点
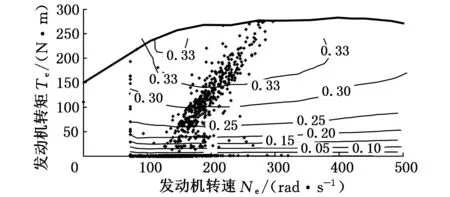
(b)基于ECMS能量管理控制方法的发动机工作点图5 发动机工作点对比
(a)基于WL-ECMS能量管理控制方法的电机工作点

(b)基于ECMS能量管理控制方法的电机工作点图6 电机工作点对比
图7为基于WL-ECMS能量管理控制方法和基于ECMS能量管理控制方法的车速跟随误差曲线的对比。分析图7a或图7b可知,在整个循环工况下,车速误差均较小,因此基于WL-ECMS的能量管理控制方法和基于ECMS的能量管理控制方法均能实现良好的车速跟随。

(a)基于WL-ECMS能量管理控制方法的车速误差
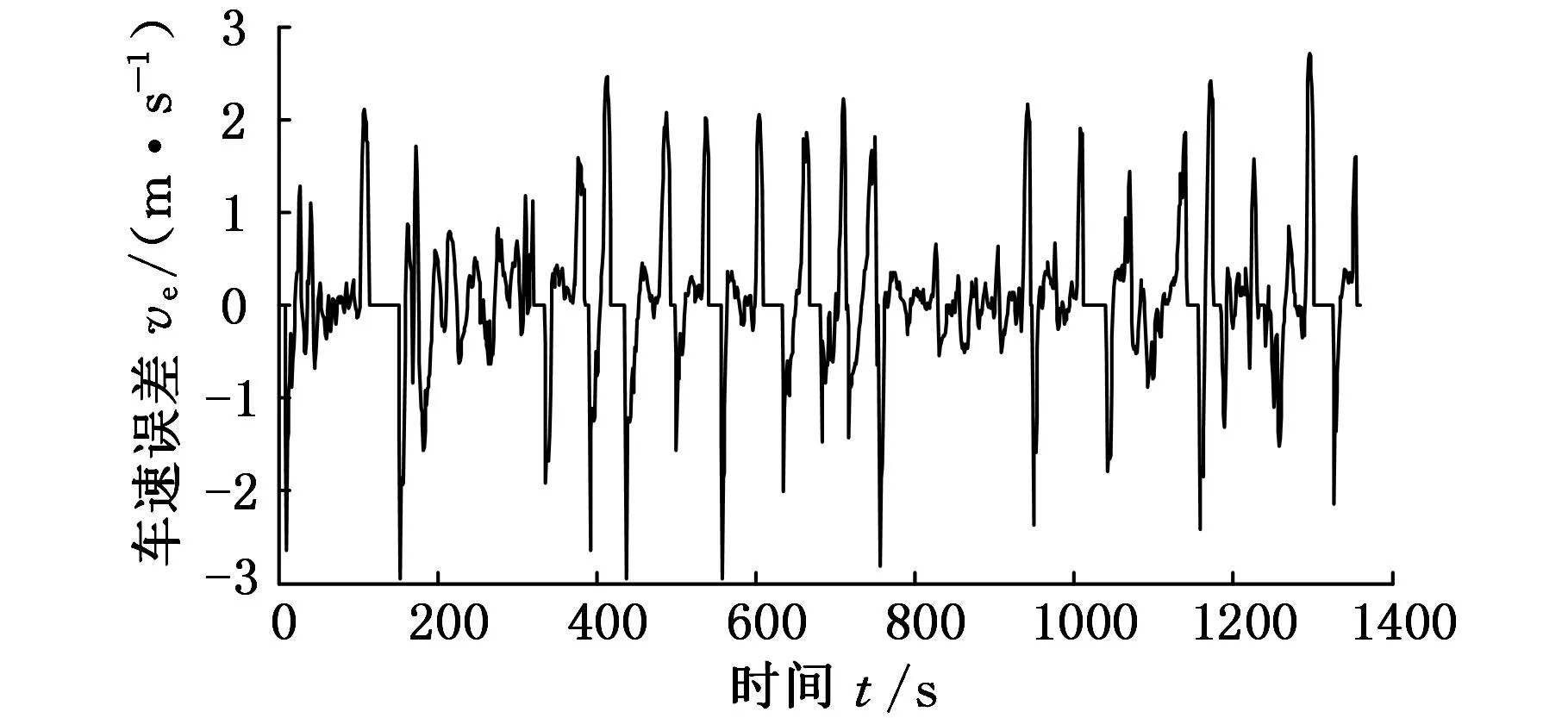
(b)基于ECMS能量管理控制方法的车速误差图7 车速误差对比
为了更直观地说明本文提出的基于WL-ECMS的能量管理控制方法的控制效果,本文将基于ECMS、基于WL-ECMS和基于规则的能量管理控制方法从百公里油耗,程序的相对运行时间以及平均跟随车速误差几个方面进行了对比,结果如表2所示。
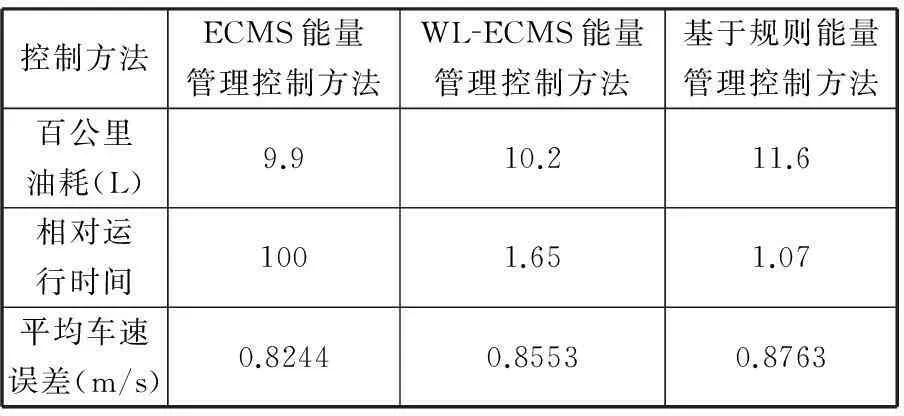
表2 控制效果对比
由表2可知,本文提出的基于WL-ECMS的能量管理控制方法比基于ECMS的能量管理控制方法百公里油耗仅高3.03%,但比基于规则的能量管理控制方法油耗低12.07%。平均车速误差与基于ECMS的能量管理控制方法和基于规则的能量管理控制方法相当。由此可知,基于WL-ECMS的能量管理控制方法可以实现与基于ECMS的能量管理控制方法相近的控制效果,且优于基于规则的能量管理控制方法。另外,由于WL-ECMS采用了Willans Line模型对ECMS进行了简化,对于一个计算步长,程序的相对运行时间由基于ECMS的100降低到基于WL-ECMS的1.65,程序运行时间的降低效果十分显著,且与基于规则的相对运行时间1.07相差不大,可以实现混合动力汽车的实时能量管理。
4结论
(1)基于WL-ECMS的能量管理方法可以实现本文研究的双轴驱动混合动力越野车基本的能量管理,各动力部件的工作情况良好,车速跟随误差较小。
(2)基于WL-ECMS的能量管理控制方法下,发动机和电机的工作点比基于ECMS的能量管理控制方法略差,百公里油耗仅比基于ECMS的能量管理控制方法高3.03%,但比基于规则的能量管理控制方法低12.07%。
(3)基于WL-ECMS的能量管理控制方法可以实现混合动力越野车的实时能量管理。每一个计算步长的相对计算时间与基于规则的能量管理控制方法相当,且由基于ECMS的能量管理控制方法的100下降到1.65,程序运行时间下降效果十分显著。
参考文献:
[1]钱立军,邱利宏,陈朋. 基于模糊PID扭矩识别的混合动力汽车优化控制[J].中国机械工程,2015,26(13):1752-1759.
Qian Lijun, Qiu Lihong, Chen Peng. Optimal Control of a Hybrid Electric Vehicle Based on Fuzzy PID Indentification[J]. Chinese Journal of Mechanical Engineering, 2015,26(13):1752-1759.
[2]钱立军,邱利宏,辛付龙,等. 插电式四驱混合动力汽车能量管理与转矩协调控制策略[J]. 农业工程学报,2014,30(19):55-64.
Qian Lijun, Qiu Lihong, Xin Fulong, et al. Energy Management and Torque Coordination Control for Plug-in 4WD Hybrid Electric Vehicle[J]. Transactions of the Chinese Society of Agricultural Engineering (Transactions of the CSAE), 2014, 30(19): 55-64.
[3]钱立军,邱利宏,辛付龙. 插电式四驱混合动力汽车控制策略设计及优化[J]. 西南交通大学学报,2015,25(6):1114-1121.
Qian Lijun, Qiu Lihong, Xin Fulong. Design and Optimization of Control Strategy for Plug-in 4WD Hybrid Electric Vehicles[J]. Journal of Southwest Jiaotong Univesity, 2015,25(6):1114-1121.
[4]钱立军,邱利宏,辛付龙,等. 插电式四驱混合动力汽车能量管理控制策略及其优化[J]. 农业工程学报,2015,31(13):68-76.
Qian Lijun, Qiu Lihong, Xin Fulong, et al. Energy Management Control Strategy and Optimization for Plug-in 4WD Hybrid Electric Vehicle[J]. Transactions of the Chinese Society of Agricultural Engineering (Transactions of the CSAE), 2015, 31(13): 68-76.
[5]Li Liang, Yang Chao, Zhang Yahui. Correctional DP-basedEnergy Management Strategy of Plug-in Hybrid Electric Bus for City-bus-route[J]. IEEE Transactions on Vehicular Technology, 2015,64(7):2792-2803.
[6]Serrao L, Onori S, Rizzoni, G. ECMS as aRealization of Pontryagin’s Minimum Principle for HEV Control[C]//American Control Conference. St. Louis, MO, USA, 2009: 3964-3969.
[7]Sezer V, Gokasan M, Bogosyan S. ANovel ECMS and Combined Cost Map Approach for High-efficiency Series Hybrid Electric Vehicles[J]. IEEE Transactions on Vehicular Technology, 2011, 60(8): 3557-3570.
[8]杜波,秦大同,段志辉,等. 新型并联式混合动力汽车模式切换协调控制[J]. 中国机械工程,2012,23(6):739-744.
Du Bo, Qin Datong, Duan Zhihui, et al. Coordinated Control for Mode-switch of a New Parallel HEV[J]. Chinese Journal of Mechanical Engineering, 2012, 23(6): 739-744.
[9]杨阳,杨文辉,秦大同,等. 强混合动力汽车驱动模式切换扭矩协调控制策略[J]. 重庆大学学报,2011,34(12):74-81.
Yang Yang, Yang Wenhui, Qin Datong, et al. Coordinated Torque Control Strategy for Driving-mode-switch of Strong Hybrid Electric Vehicle[J]. Journal of Chongqing University, 2011, 34(12): 74-81.
[10]林歆悠,孙冬野,秦大同,等. 混联式混合动力客车全局优化控制策略研究[J]. 中国机械工程,2011,22(18):2259-2263.
Lin Xinyou, Sun Dongye, Qin Datong, et al. Development of Power-balancing Global Optimization for Series-parallel Hybrid Electric City Bus[J]. Chinese Journal of Mechanical Engineering, 2011,22(18): 2259-2263.
[11]吴建强. 工程机械液力变矩器特性建模与匹配分析[D]. 长春:吉林大学,2005.
[12]赵治国,何宁,朱阳,等. 四轮驱动混合动力轿车驱动模式切换控制[J]. 机械工程学报,2011,47(4):100-109.
Zhao Zhiguo, He Ning, Zhu Yang, et al. Mode Transition Control for Four Wheel Drive Hybrid Electric Car[J]. Journal of Mechanical Engineering, 2011, 47(4): 100-109.
[13]张博,李君,高莹,等. Plug-in混合动力汽车能量管理策略全局优化研究[J]. 中国机械工程,2010,21(6):715-720.
Zhang Bo, Li Jun, Gao Ying, et al. Study on Global Optimization of Plug-in Hybrid Electric Vehicle Energy Management Strategies[J]. Chinese Journal of Mechanical Engineering, 2010, 21(6): 715-720.
[14]Rizzoni G, Guzzella L, Baumann B M.Unified Modeling of Hybrid Electric Vehicle Drivetrains[J]. IEEE/ASME Transactions on Mechatronics, 1999, 4(3):246-257.
[15]Zulkefli M A M, Zheng J, Sun Z, et al.Hybrid Powertrain Optimization with Trajectory Prediction Based on Inter-vehicle-communication and Vehicle-infrastructure-integration[J]. Transportation Research Part C, 2014, 45(8):41-63.
(编辑王艳丽)
Real-time Energy Management of a Dual-axle-driven Off-road HEV Based on Willans Line
Kan Ping1Qiu Lihong2,3Qian Lijun2Wang Jinbo2
1.Anhui Communications Vocational & Technical College,Hefei,230001 2.Hefei University of Technology,Hefei,230009 3.Clemson University International Center for Automotive Research,Greenville,29607
Abstract:In order to achieve the real-time energy management of an off-road HEV, the dynamics models of the power components were built. A method was proposed based on the Willans Line models of engine and motor, and the optimal output power models of the engine and motor were built based on the WL-ECMS. HIL experimental results show that the WL-ECMS-based strategy can realize the basic energy management of the off-road HEV, and the velocity errors are kept within a desired range. The hundred kilometers fuel consumption with WL-ECMS strategy is only 3.03% more than that of ECMS and 12.07% less than that of the rule-based strategy. Furthermore, the computational time for a single step is reduced to 1.65 from that of 100 with ECMS, and it is comparable with the 1.07 of that of the rule-based strategy, thus the real-time energy management of the off-road HEV is realized.
Key words:off-road hybrid electric vehicle(HEV); real-time energy management;Willans Line(WL); equivalent consumption minimization strategy(ECMS);hardware-in-the-loop(HIL)
收稿日期:2016-01-05
基金项目:国家科技支撑计划资助项目(2013BAG08B01);国家新能源汽车技术创新工程资助项目(财建[2012]1095)
中图分类号:U469.7
DOI:10.3969/j.issn.1004-132X.2016.11.023
作者简介:阚萍,女,1963年生。安徽交通职业技术学院副教授。主要研究方向为汽车现代设计理论与方法。发表论文20余篇。邱利宏,男,1989年生。合肥工业大学机械与汽车工程学院与美国克莱姆森大学国际汽车研究中心联合培养博士研究生。钱立军,男,1962年生。合肥工业大学机械与汽车工程学院教授、博士研究生导师。王金波,男,1979年生。合肥工业大学机械与汽车工程学院博士研究生。
