机载无线激光通信对准-捕获-跟踪系统及动态飞行试验研究
2016-07-29 01:36李小明张立中孟立新宋延嵩姜会林空间光电技术国家地方联合工程研究中心吉林长春30022长春理工大学光电工程学院吉林长春30022
兵工学报 2016年6期
李小明,张立中,孟立新,宋延嵩,姜会林(.空间光电技术国家地方联合工程研究中心,吉林长春30022;2.长春理工大学光电工程学院,吉林长春30022)
机载无线激光通信对准-捕获-跟踪系统及动态飞行试验研究
李小明1,2,张立中1,孟立新1,宋延嵩1,姜会林1
(1.空间光电技术国家地方联合工程研究中心,吉林长春130022;2.长春理工大学光电工程学院,吉林长春130022)
摘要:机载无线激光通信具有通信速率高、抗干扰能力强、保密性好、布置灵活等优点,在天地一体化高速信息网络、军用保密通信、电磁干扰环境下可靠通信等应用中有着广阔前景。为解决机载环境下激光通信光轴对准难题,通过对无线激光通信系统特点和Y-12型飞机平台特性的分析,采用粗、精两级复合跟踪方案,设计了由被动减震结合主动抑制的粗跟踪单元和电磁振镜精跟踪单元组成的机载无线激光通信对准、捕获、跟踪(PAT)系统。Y-12飞机搭载该系统开展了双固定翼飞机间远距离、高速机载激光通信试验,验证了所设计的机载无线激光通信PAT系统的跟踪性能和机载环境适应性。
关键词:通信技术;激光通信;机载平台;对准、捕获、跟踪
0 引言
飞机既是机动灵活的侦查平台,又是天空地一体化信息网络的重要传输节点。作为侦查平台,飞机可以搭载多种传感器,对地、对海、对空获取丰富侦查信息,并由高速链路对外传输;通信网络节点可以作为中继站,扩大地面、海面网络的覆盖范围或实现天地间信息转发。随着探测技术的不断发展,探测器分辨率的不断提高,数据量逐步加大,对通信带宽的要求越来越高,尤其通信的中继终端,数据量更是成倍的增加。空间无线激光通信技术具有传输速率高、保密性好、抗电磁干扰能力强等优势,是航空平台对外信息传输的一种高效手段,机载无线激光通信技术发展可以大幅提升信息网络的数据传输能力[1-2]。
国外主要的机载平台激光通信试验有:1996年美国Thermo Trex(TT)公司进行的飞机对地面站间光通信试验,飞行高度1.1 km,通信速率1 Gbit/s,通信距离20~30 km.2009年美国麻省理工学院完成的飞机与地面站之间激光通信试验,飞行高度3.657 km,通信速率2.5 Gbit/s,链路距离25 km. 2011年美国 TT公司与美国空军研究实验室(AFRL)完成的飞机对飞机激光链路通信试验,通信速率2.5 Gbit/s,通信距离94~132 km[3-4].在国内,2011年长春理工大学完成双直升机间高速激光通信试验,飞行高度600~800 m,速率1.5 Gbit/s,距离17.5 km,误码率10-6.
飞机作为高速的运动平台在扩大通信范围的同时,也给无线激光通信带来了很大的难度。飞机位置及姿态实时快速变化以及强烈的振动使得通信光轴的对准十分困难,必须采用对准、捕获、跟踪(PAT)系统保证通信光轴高精度对准,为无线激光通信奠定基础[5]。
1 机载振动环境分析
飞机高速飞行时,平台振动强烈,低频扰动幅度大,姿态变化快,随机性强,振动和扰动的幅度不仅远大于可靠通信所要求的光轴对准误差,而且也远大于开环指向所需要的光轴对准精度。所以机载激光通信系统必须采用PAT系统抑制飞机平台的振动和扰动,保证通信双方光轴高精度对准,否则根本无法建立通信链路[6]。为了给PAT系统提供必要的设计参数,采用便携式振动测试仪,配合高精度传感器对搭载激光通信系统的Y-12飞机振动情况进行了测试,传感器参数如表1所示,测得的振动情况如图1所示。
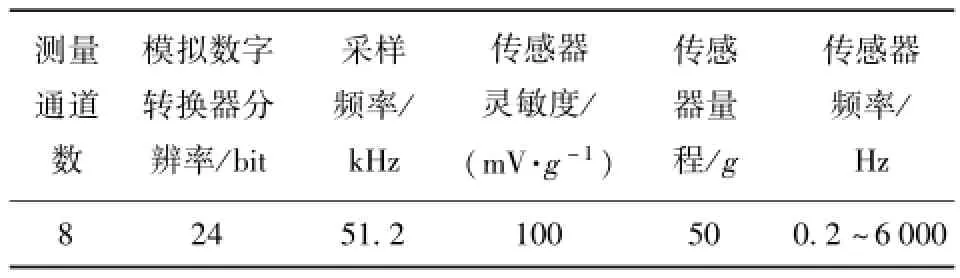
表1 便携式振动测试仪技术参数Tab.1 Parameters of vibration tester
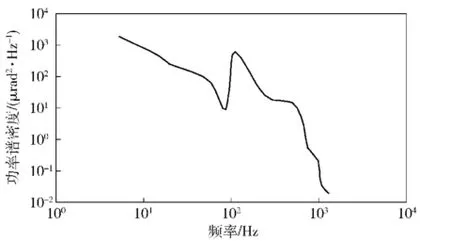
图1 Y-12飞机振动测试曲线Fig.1 Vibration test curve of Y-12 plane
从图1测试曲线中可以看出:飞机谐振点在100 Hz左右,最大振幅约为265 μrad,振动频率最大1 000 Hz左右,所以飞机的低频振动比较强烈。
采用惯性导航系统(INS)测量飞机低频姿态变化,测试结果如图2和图3所示。
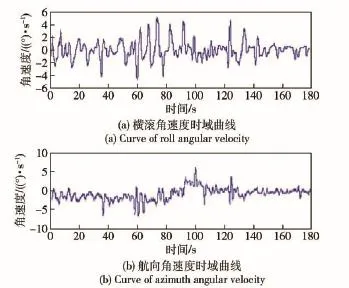
图2 INS测得飞机低频姿态角速度变化Fig.2 Pose variation of plane test by INS
从图3中可以看出,飞机飞行时,姿态变化较为明显,最大姿态角速度约为6°/s,最大角加速度约为20°/s2.
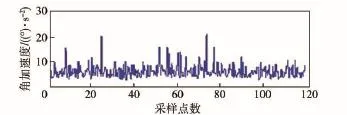
图3 INS测得飞机低频姿态角加速度变化Fig.3 Acceleration variation of plane test by INS
2 PAT系统功能及主要参数分析
本文的机载无线激光通信PAT系统采用有信标结构,主要工作过程分为初始指向、快速捕获、精确跟踪3个主要阶段,其工作过程如图4所示,在PAT系统完成精确跟踪后,系统即可开始进行动态激光通信。PAT系统跟踪精度要求为粗跟踪精度50 μrad(1σ,σ为总体标准差),精跟踪精度8 μrad(1σ).

图4 机载无线激光通信PAT系统工作流程示意图Fig.4 Working process of PAT system
初始对准不确定区域(FOU)是影响激光通信终端光轴对准的重要参数,如果不确定区域过大,将严重制约捕获时间、捕获概率。但是,不确定区域的减小受到终端所在平台姿态控制精度、平台空间定位精度、伺服转台指向精度和稳定精度等限制。对于机载激光通信系统,根据各误差环节对其捕获不确定区域分析如表2所示。
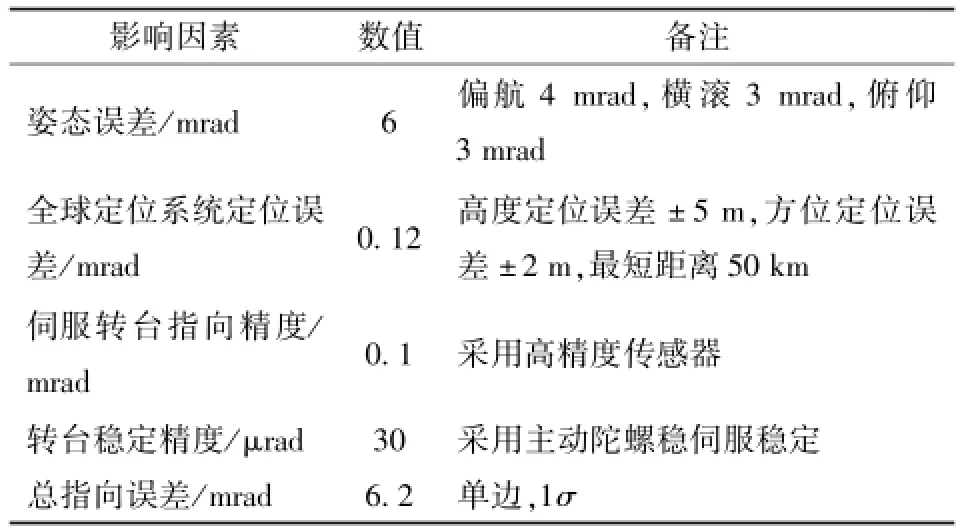
表2 不确定区域分析表Tab.2 Analysis of uncertain region
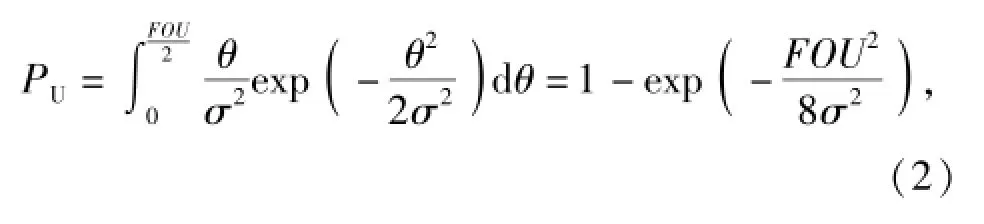
目标出现在捕获不确定区域的概率为

式中:θv为俯仰方向的角偏差;θh为方位方向的角偏差;″OU为初始对准不确定区。(1)式可简化成幅度上为瑞利分布、极角为1/(2π)的均匀分布,在极坐标内积分为
粗跟踪精度主要受系统跟踪电荷耦合元件(CCD)相机测量误差、动态滞后误差、平台振动抑制残差影响。动态滞后误差可表示为

测试表明飞机姿态变化最大速度约为6°/s,角加速度20°/s2,控制系统 Kv设计为6 000,Ka为23 000.系统的滞后误差为23.5 μrad.分析表明,系统可满足粗跟踪精度50 μrad(见表3)的要求,精跟踪分析见表4.
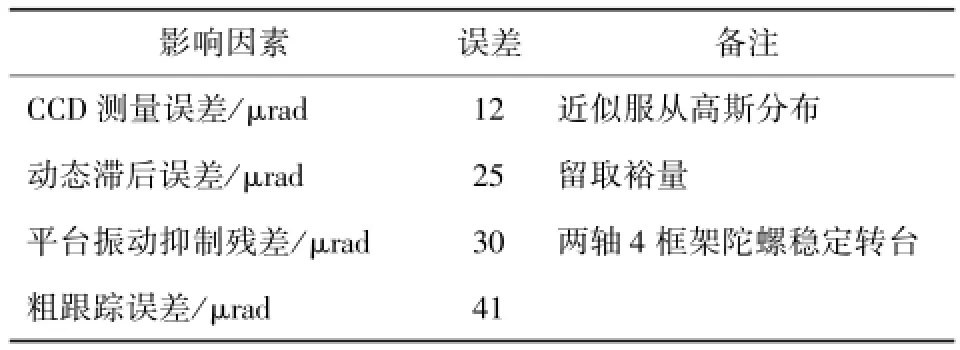
表3 粗跟踪精度分析Tab.3 Accuracy analysis of coarse tracking system
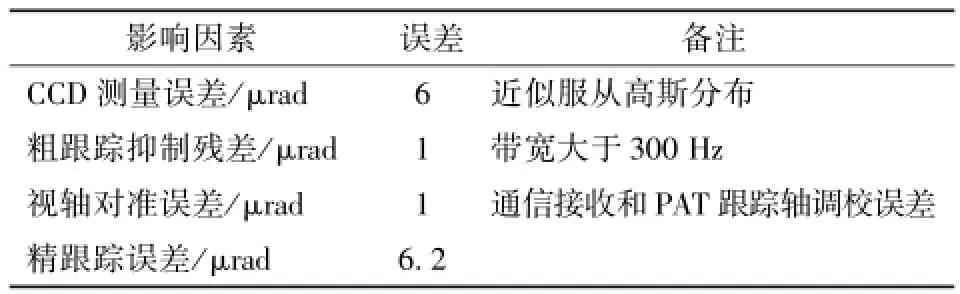
表4 精跟踪精度分析Tab.4 Accuracy analysis of fine tracking system
3 PAT系统设计
3.1系统组成
由于飞机姿态变化范围大、振动频率高,要在机载环境下实现通信双方光轴的高精度对准,不仅需要PAT系统具有高跟踪带宽和高跟踪精度,还要具备较大的跟踪范围。因此本文中采用粗、精两级复合跟踪方案:1)由跟踪精度和带宽都相对低,但跟踪范围大的粗跟踪系统对目标进行粗跟踪,将目标稳定在精跟踪系统视场范围内;2)由跟踪范围小,但精度和带宽较高的精跟踪单元进行跟踪,满足系统高精度跟踪的要求。研制的机载激光通信PAT系统组成如图5所示,系统主要由粗跟踪转台、光学基台(内部有精跟踪单元等)及其PAT控制单元组成。光学基台光学原理如图6所示,主要由信标发射光学天线、粗跟踪接收光学天线和通信、精跟踪共用光学天线及相应的光斑检测单元和控制单元等组成。
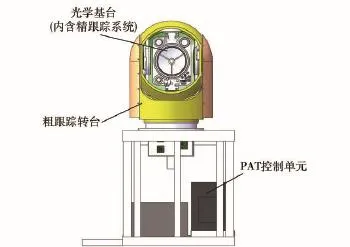
图5 机载激光通信PAT系统组成示意图Fig.5 Composition of PAT system for airborne laser communication
3.2分系统设计
3.2.1粗跟踪单元
根据机载平台振动环境特点,粗跟踪单元设计为两轴4框架跟踪机构[7],跟踪机构由内、外环架组成,如图7所示。
4框架即内方位框架、内俯仰框架、外俯仰框架和外方位框架,内、外环路均包含独立的方位轴和俯仰轴,为两轴结构。内、外环之间通过减振器联接,外环的方位和俯仰运动随动于内环。粗跟踪转台的稳定精度和跟踪精度由内环保证,内环采用直驱方式,实现高带宽的要求。其负载为光学基台,光学基台采用整体稳定模式,激光通信组件、精跟踪组件和粗跟踪相机安装在光学基台上,内环的负载为16 kg.内框架的转动范围设计为±5°,因其质量相对较小,运动范围小,所以可实现优于50 μrad的跟踪精度。外环框架的设计为方位角±180°、俯仰角±90°的大范围运动,随动于内框架,同时抑制风阻、平台移动或振动等干扰。
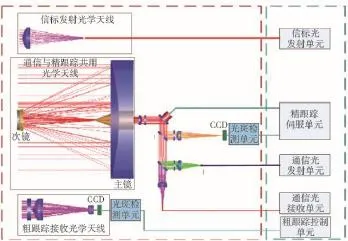
图6 光学基台光学原理图Fig.6 Composition of optical system
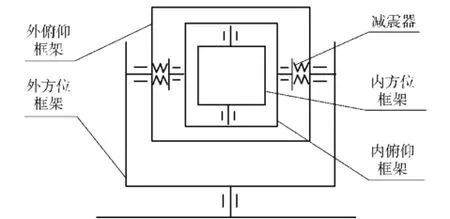
图7 两轴4框架结构示意图Fig.7 Structure diagram of coarse tracking mechanism
粗跟踪转台采用球形结构设计,可以减少外挂在飞机上时,飞行过程中产生的风阻和风扰力矩。光电转台采用动态密封技术,以满足防雨、防潮和气密性等环境要求。为了使转台内安装的传感器在高空有良好的压力工作环境,转台上安装有泄压阀,保持高空转台内外的压力平衡。粗跟踪转台的结构和外形如图8所示。
由于主动伺服系统的伺服带宽有限,对超出伺服带宽的高频振动采用减振器进行被动减振。减振器要具有足够的衰减能力,并且放大段必须在伺服控制带宽以内,保证被减振器放大的振动能被主动伺服系统衰减[8]。经过设计,两轴4框架转台的伺服带宽能达到20 Hz左右[9],飞机的振动在20 Hz处振动幅度为70 μrad,因此要求减振器在该频率处的衰减要大于0.35,放大段最高频率小于20 Hz.最终选择减振器的衰减率曲线如图9所示,减振器放大段最高频率约为10 Hz,20 Hz处衰减为0.3,大于50 Hz后衰减率大于0.1.
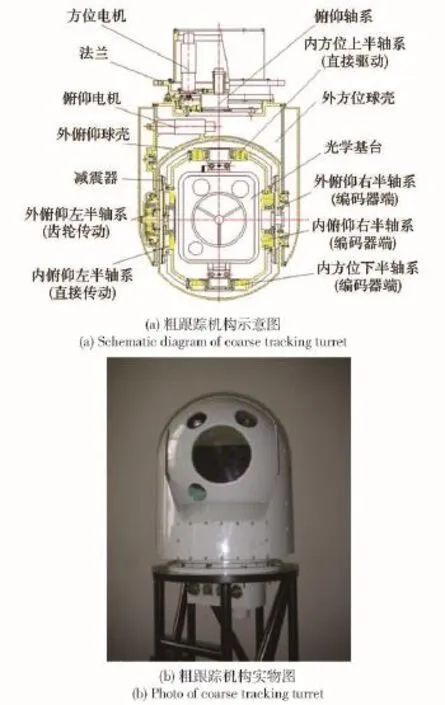
图8 粗跟踪机构图Fig.8 Coarse tracking turret
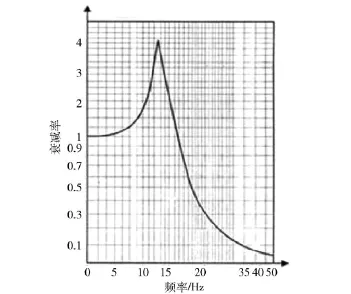
图9 减振器衰减率曲线Fig.9 Attenuation curve of damper
3.2.2精跟踪单元
精跟踪单元的主要作用是在粗跟踪的基础上对跟踪残差进行进一步主动抑制,提高光轴对准精度[9]。该单元由CCD相机光斑检测单元、精跟踪控制单元和振镜组成,如图10所示。影响精跟踪精度的主要误差源为执行器误差、光斑检测误差、动态滞后误差、平台振动残差。为了提高精跟踪系统的跟踪精度,采用CCD相机亚像素细分技术、自动调整积分时间技术实现光斑高精度检测[10-11];选用对感兴趣窗口随机读出(ROI)模式的相机,采用像元合素等技术实现2 000帧频输出。
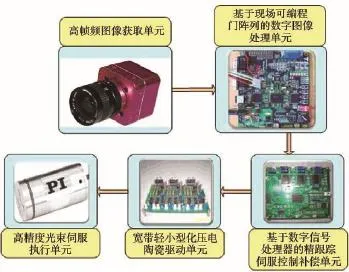
图10 精跟踪伺服单元组成图Fig.10 Structure of fine tracking system
根据系统需求,精跟踪单元设计的闭环幅频和相频特性曲线如图11所示。从图11曲线可以看到,系统开环截止频率333 Hz,相位裕量65.4°,保证了系统的稳定性,同时系统的带宽和伺服刚度满足设计要求。
4 系统性能测试及飞行试验
4.1室内测试
机载转台结构装配完成后,通过扫频实验检验结构刚度和被动减振效果。使用振动台对转台施加随机振动激励,分别测试转台外框架、内框架的频率响应特性,传感器安装和测试曲线如图12和图13所示,其中4号、5号为外环传感器,6号、7号为内环传感器。
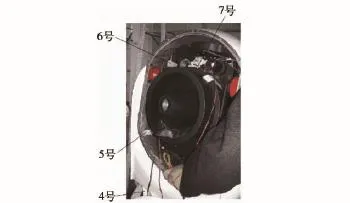
图12 传感器安装示意图Fig.12 Installation instruction of sensors
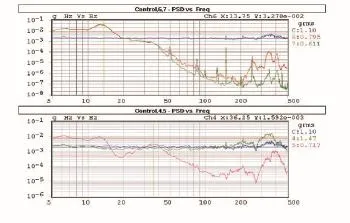
图13 随机共振测试曲线(5~500 Hz)Fig.13 Curves of stochastic resonance(5~500 Hz)
由图13可见,系统的内环的谐振频率约为12 Hz,小于伺服系统设计带宽,外环的振动得到有效衰减。
通过室内动态跟踪实验,验证PAT系统的动态跟踪性能,为后续开展野外飞行试验提供保证。测试现场如图14所示,跟踪精度测试结果如图15所示。
室内动态测试表明在模拟机载振动条件下PAT系统粗跟踪精度50 μrad(最大值),22 μrad(1σ),精跟踪精度4 μrad(最大值),2 μrad(1σ).

图14 机载PAT系统室内测试Fig.14 Indoor testing of PAT system
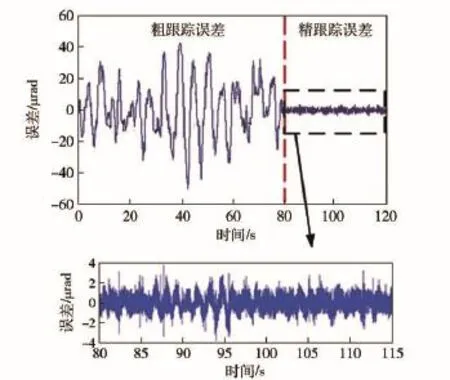
图15 PAT系统室内测试精度Fig.15 Indoor test accuracy of PAT system
4.2野外飞行测试
采用两架Y-12飞机对机载PAT系统性能进行了一系列的飞行试验和测试。机载PAT试验系统如图16所示,系统安装在安装支架上,固定在飞机机舱内部,如图17所示。
为了减小飞机高速飞行时产生的气动光学效应对系统的影响,对PAT系统安装处的飞机窗口进行了适应性改造,如图18所示。机载 PAT系统在10~144 km距离上进行了机载条件下的性能动态测试。
图19和图20分别为机载条件下PAT系统的粗跟踪和精跟踪误差,可见粗跟踪误差(1σ):方位轴16.19 μrad,俯仰轴 17.68 μrad;精跟踪误差(1σ):方位轴5.5 μrad,俯仰轴4.4 μrad.

图16 机载PAT试验系统Fig.16 PAT experimental system

图17 机载PAT系统机舱内安装图Fig.17 Inside place of PAT system

图18 双固定翼飞机激光通信试验光学窗口Fig.18 Optical windows for experiment
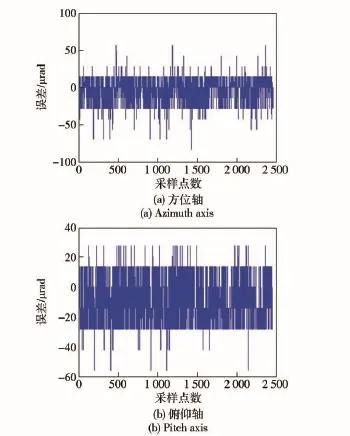
图19 粗跟踪精度Fig.19 Tracking accuracy of coarse tracking system
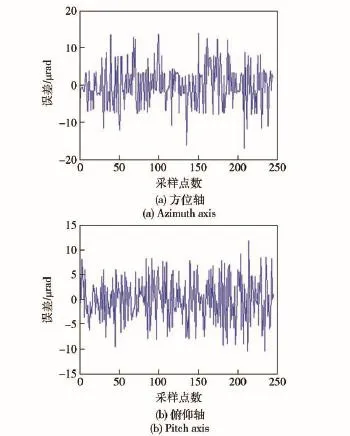
图20 精跟踪精度Fig.20 Tracking accuracy of fine tracking system
5 结论
本文通过对飞机平台特性的测试,针对性地对机载无线激光通信PAT系统的主要参数进行研究与分析,设计了由两轴4框架粗跟踪单元、基于压电陶瓷振镜的精跟踪单元组成的机载PAT试验系统。并采用Y-12飞机在国内首次进行两架固定翼飞机间距离10~144 km的的远距离捕获、跟踪试验。试验表明机载PAT系统在实际机载环境下,粗跟踪精度优于25 μrad(1σ),精跟踪精度优于8 μrad(1σ),为机载高速、远距离无线激光通信提供了保障。
参考文献(References)
[1] 姜会林,胡源,丁莹,等.空间激光通信组网光学原理研究[J].光学学报,2012,32(10):1006003. JIANG Hui-lin,HU Yuan,DING Ying,et al.Optical principle research of space laser communication network[J].Acta Optica Sinica,2012,32(10):1006003.(in Chinese)
[2] 徐彦军,王瑞.大气紊流对运输机颠簸影响分析[J].兵工学报,2015,36(2):133-135. XU Yan-jun,WANG Rui.Analysis of transport plane bump caused by air turbulence[J].Acta Armamentarii,2015,36(2):133-135.(in Chinese)
[3] 赵馨,王世峰,佟首峰,等.飞机-地面间激光通信天线的初始对准[J].光学精密工程,2008,16(7):1190-1195. ZHAO Xin,WANG Shi-feng,TONG Shou-feng,et al.Initial alignment of antenna for laser communication system between aircraft and ground station[J].Optics and Precision Engineering,2008,16(7):1190-1195.(in Chinese)
[4] Juarez J C,HughesD H.Free-space optical channel propagation tests over a 147 km link[C]∥Atmospheric PropagationⅧ.Orlando,FL:SPIE,2011.
[5] Fletcher T M,Cunningham J,Baber D,et al.Observations of atmospheric effects for FALCON laser communication system flight test[C]∥Atmospheric PropagationⅧ.Orlando,FL:SPIE,2011.
[6] 赵馨,宋延篙,佟首峰,等.空间激光通信捕获、对准、跟踪系统动态演示实验[J].中国激光,2014,41(3):125-130. ZHAO Xin,SONG Yan-song,TONG Shou-feng,et al.Dynamic demonstration tracking system experiment of acquisition pointing and tracking system in space laser communications[J].Chinese Journal of Lasers,2014,41(3):125-130.(in Chinese)
[7] 杨少康.机载光电稳定平台减振技术应用研究[D].西安:西安工业大学,2013. YANG Shao-kang.Application research of vibration damping technology on the airborne photoelectric stabilized platform[D].Xi'an:Xi'an Technological University,2013.(in Chinese)
[8] 王平,王伟,丁金伟,等.机载光电侦察平台复合减振设计[J].光学精密工程,2011,19(1):83-89. WANG Ping,WANG Wei,DING Jin-wei,et al.Vibration damping design for airborne electro-optical surveillance platform[J]. Optics and Precision Engineering,2011,19(1):83-89.(in Chinese)
[9] 张卫国,陶忠,孟立庄.两轴四框架结构光电稳瞄吊舱减振器谐振频率计算与试验[J].应用光学,2008,29(1):23-26. ZHANG Wei-guo,TAO Zhong,MENG Li-zhuang.Resonant frequency calculation and test for danger of two axes four-gimbal EO pod[J].Journal of Applied Optics,2008,29(1):23-26.(in Chinese)
[10] 冉茂鹏,王青,莫华东,等.基于自适应神经模糊系统的高超声速飞行器再入预测制导[J].兵工学报,2014.35(12):2016-2022. RAN Mao-peng,WANG Qing,MO Hua-dong,et,al.ANFIS-based predictive reentry guidance for hypersonic vehicles[J]. Acta Armamentarii,2014,35(12):2016-2022.(in Chinese)
[11] 任斌,佟首峰,宋延嵩,等.空间激光通信精跟踪单元的高精度快速PZT驱动技术研究[J].仪器仪表学报,2011,32(2):420-425. REN Bin,TONG Shou-feng,SONG Yan-song,et al.Research on the driving technique of high precision and speedy piezoelectric ceramic transducer in fine tracking system of air laser communication[J].Chinese Journal of Scientific Instrument,2011,32(2):420-425.(in Chinese)
中图分类号:TN929.1
文献标志码:A
文章编号:1000-1093(2016)06-1044-08
DOI:10.3969/j.issn.1000-1093.2016.06.011
收稿日期:2015-05-11
基金项目:教育部博士点基金项目(20132216110006)
作者简介:李小明(1984—),男,博士研究生。E-mail:lxmkidd@126.com;姜会林(1945—),男,教授,博士生导师。E-mail:hljiang@cust.edu.cn
Research and Experiment of Pointing/acquisition/tracking System for Airborne Space Laser Communication
LI Xiao-ming1,2,ZHANG Li-zhong1,MENG Li-xin1,SONG Yan-song1,JIANG Hui-lin1
(1.National and Local Joint Engineering Research Center of Space Optoelectronics Technology,Changchun 130022,Jilin,China;2.School of Photoelectric Engineering,Changchun University of Science and Technology,Changchun 130022,Jilin,China)
Abstract:Airborne space laser communication is characterized by high speed,anti-electromagnetic interference,security and easy assignment.It has been applied in the areas of integrated space-ground communication,networking communication,military communication,reliable communication in anti-electromagnetic environment.The characteristics of airborne laser communication and Y-12 plane are analyzed for aligning the communication optical-axis on airborne platform.Two-stage tracking technology is used to design an airborne pointing,acquisition and tracking(PAT)system for laser communication,which consists of coarse and fine tracking units.The long distance communication experiment of the system carried by Y-12 planes is accomplished.The experiment proves the tracking performance and adaptability of the PAT system.
Key words:communication technology;laser communication;airborne platform;pointing,acquisition and tracking
猜你喜欢
电子工业专用设备(2022年1期)2022-07-13
宇航学报(2019年8期)2019-09-06
专用汽车(2018年10期)2018-11-02
当代陕西(2018年12期)2018-08-04
中国科技纵横(2016年20期)2016-12-28
中国新通信(2016年16期)2016-10-18
中国新通信(2016年16期)2016-10-18
考试周刊(2016年64期)2016-09-22
计算技术与自动化(2015年2期)2015-09-09