基于FPGA的比例积分滑模控制DC/DC变换器研究
2016-10-11 09:02黄忻汪健陈宗祥刘雁飞
电机与控制学报 2016年9期
黄忻,汪健,陈宗祥,刘雁飞
(安徽工业大学 电气与信息工程学院,安徽 马鞍山 243000)
基于FPGA的比例积分滑模控制DC/DC变换器研究
黄忻,汪健,陈宗祥,刘雁飞
(安徽工业大学 电气与信息工程学院,安徽 马鞍山 243000)
针对DC/DC Buck变换器的动、静态性能要求,从Buck变换器状态方程出发,设计电感电流、输出电压及其积分的线性组合滑模面,并利用该滑模面证明比例积分滑模控制的存在条件及稳定性条件,构建基于FPGA控制的Buck变换器实验平台并加以验证。据此,实现所提出的算法对Buck变换器的控制。理论分析和实验结果表明,所提出的比例积分滑模变结构控制比传统的双闭环PI控制在系统参数变化、供电电压变化以及外部干扰情况下,都具有更好的鲁棒性,具有控制精度高和动态响应速度快的特点。
DC/DC Buck变换器;滑模变结构控制;组合滑模面;鲁棒性;FPGA
0 引 言
由于DC/DC变换器属于线性的离散系统,其控制是不连续、非线性的。而滑模变结构控制就是对变结构系统的一种非线性控制,它相对于传统的双闭环PI控制,对系统参数变化和外部干扰具有较强的鲁棒性。近年来,将滑模变结构控制应用于DC/DC变换器系统中,成为研究的热点[1-9]。文献8中提出一种将滑模表面与固定频率的的谐波信号相比较的方式来实现滑模控制。这种设计方法简单,鲁棒性好。然而,系统的动态响应比较慢。文献9中提出了一种基于比例积分滑模变结构控制策略,并将其应用到DC/DC Boost变换器中。这种控制策略可以获得很好的动态响应,但是它没有将其应用于BUCK变换器中。
数字化是开关电源发展的一个大趋势。由于FPGA器件具有比传统数字器件更强的数据处理能力,因而被广泛用于对DC/DC变换器的数字控制器设计[10-11]。有鉴于此,本文设计并制作了一台由FPGA 控制的数字式BUCK变换器,采用比例积分滑模控制方法,使得变换器在输入电压及负载大范围变化时有着较好的输出特性。
1 滑模控制器的原理及设计
1.1滑模控制器的动态模型及等效控制
Buck变换器在一个完整周期内的状态方程为:
(1)
其中:vi为瞬时输入电压;vo为输出电压;iL为瞬时电感电流;C、L为Buck变换器的电容和电感;u为系统的控制向量(u=0或1),表示开关器件状态。
选择3个状态变量的线性组合的滑模面,即
S=α1x1+α2x2+α3x3。
(2)
(3)
其中:iL表示瞬时电感电流;Vref和vo分别为输出电压参考值和瞬时值;iref=K(Vref-βvo)是瞬时参考电感电流;β为反馈网络比;K为电压误差的放大增益。将电流误差和电压误差的积分项x3引入到滑模变结构控制器中,形成附加的受控状态变量,以减少输出电压和电感电流的稳态误差。
将Buck变换器的状态空间方程代入式(3)并对时间求导,得到系统的动态模型为:
(4)


(5)
需要注意的是,此时的ueq是连续的,且其取值范围为0和1之间。
令ueq=d,其中d为PWM控制器的占空比。控制律方程包含控制信号vc和斜坡信号vrmap,其表达式为:
(6)
其中:
(7)
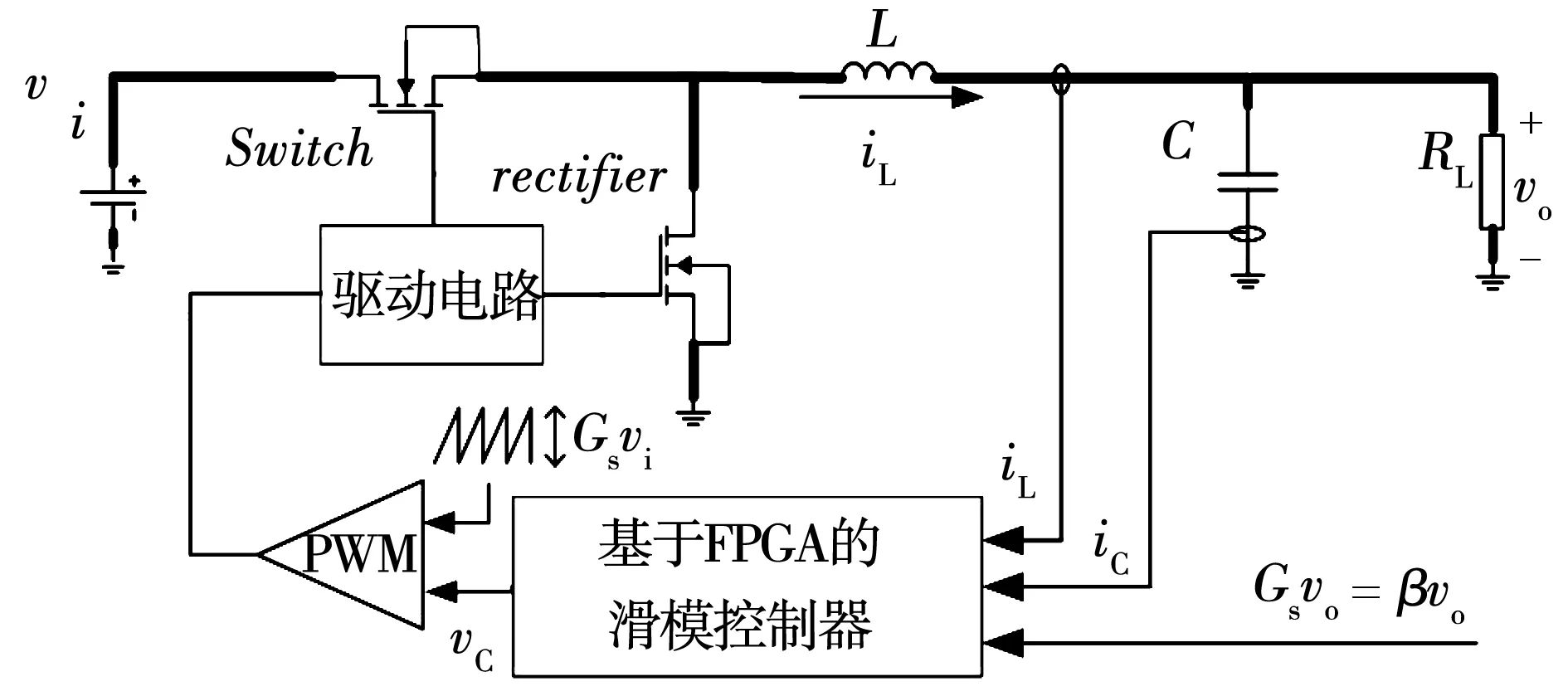
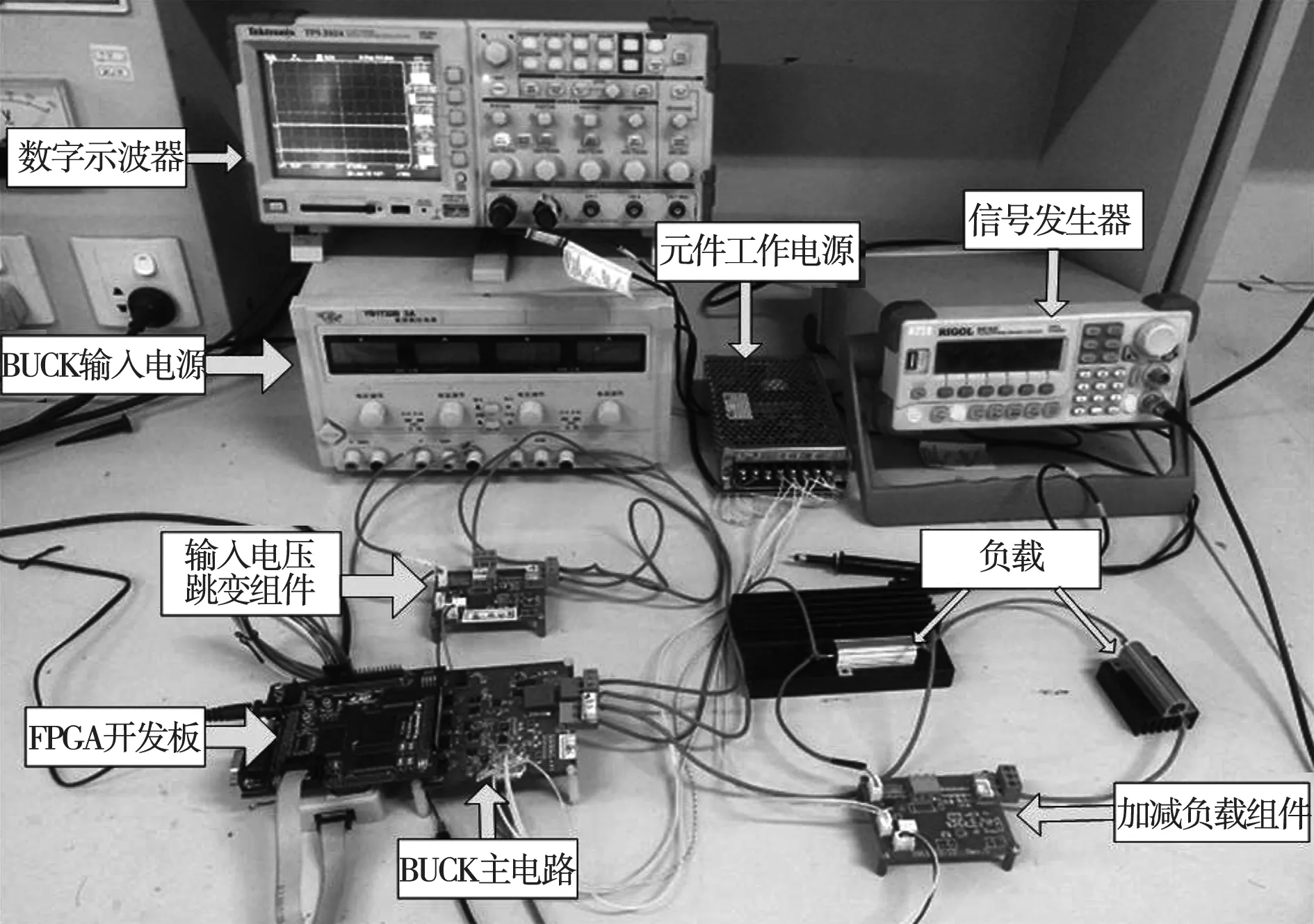
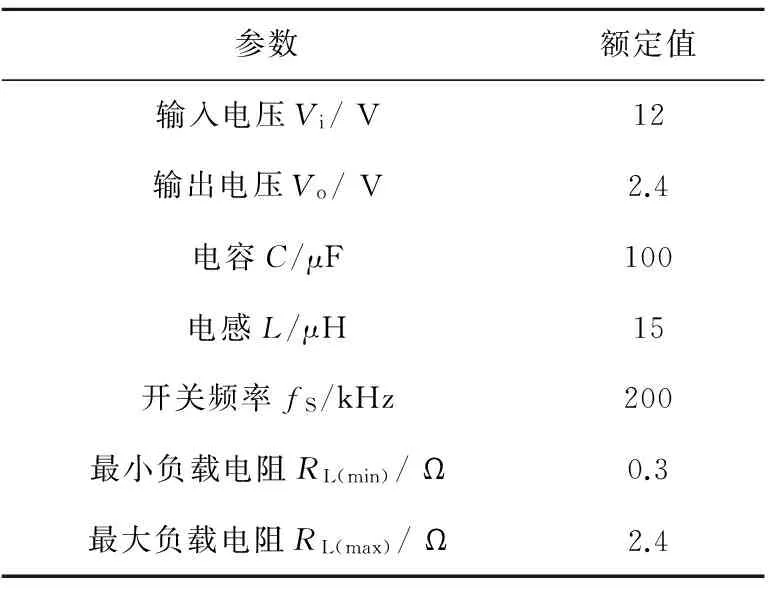
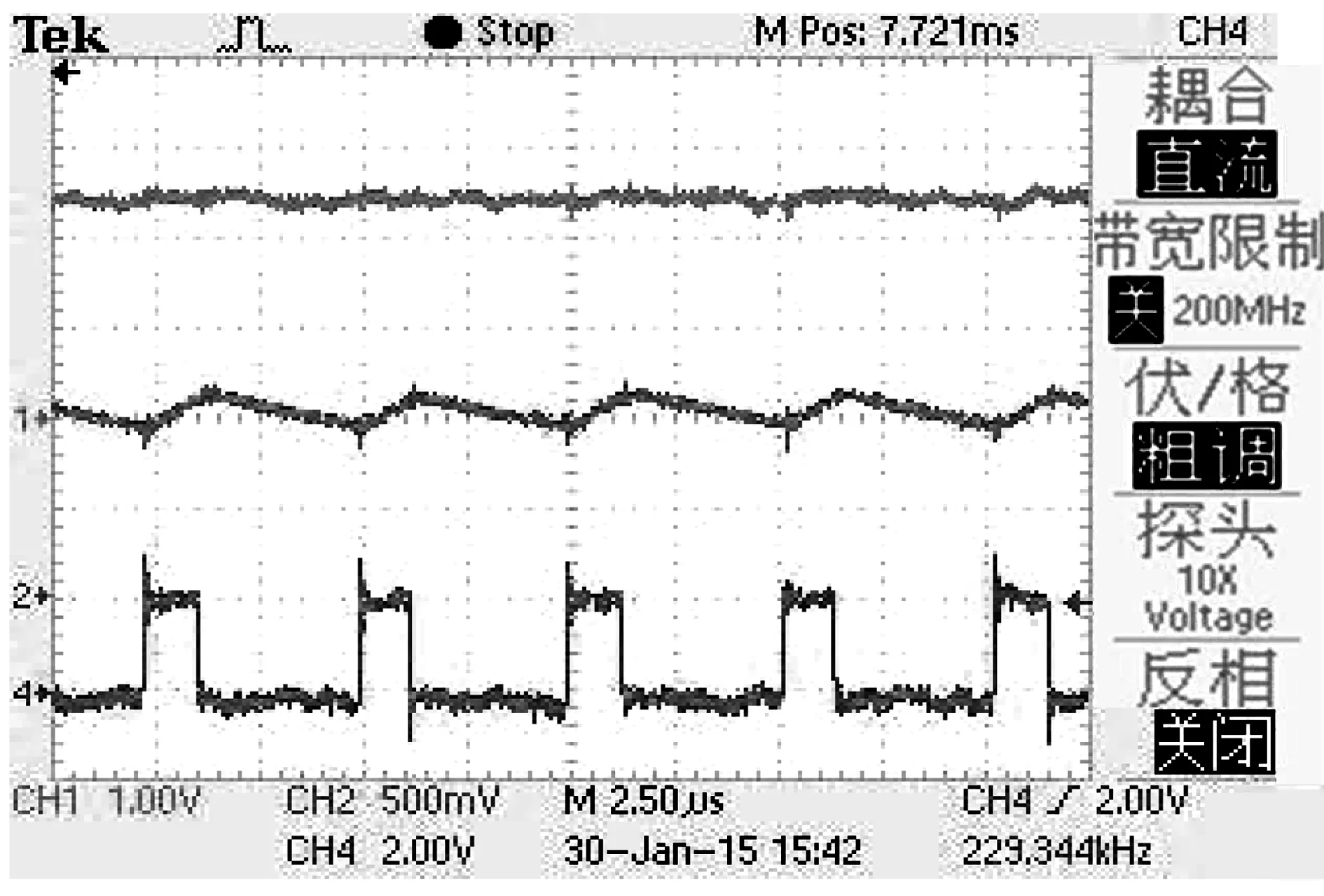
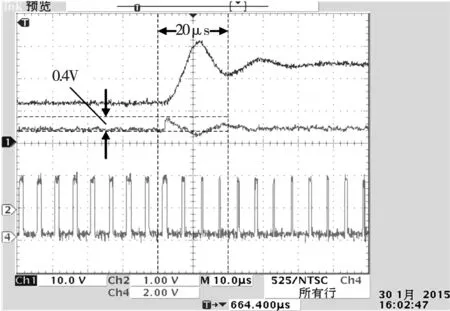
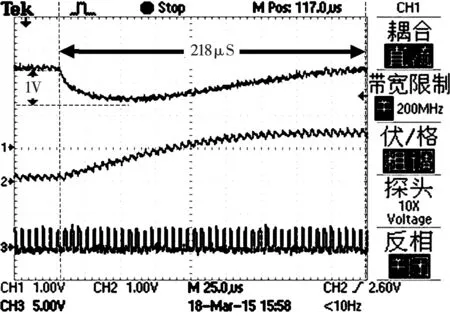
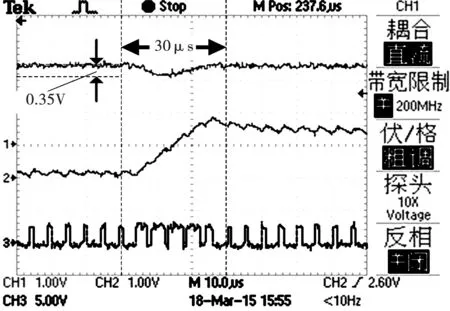
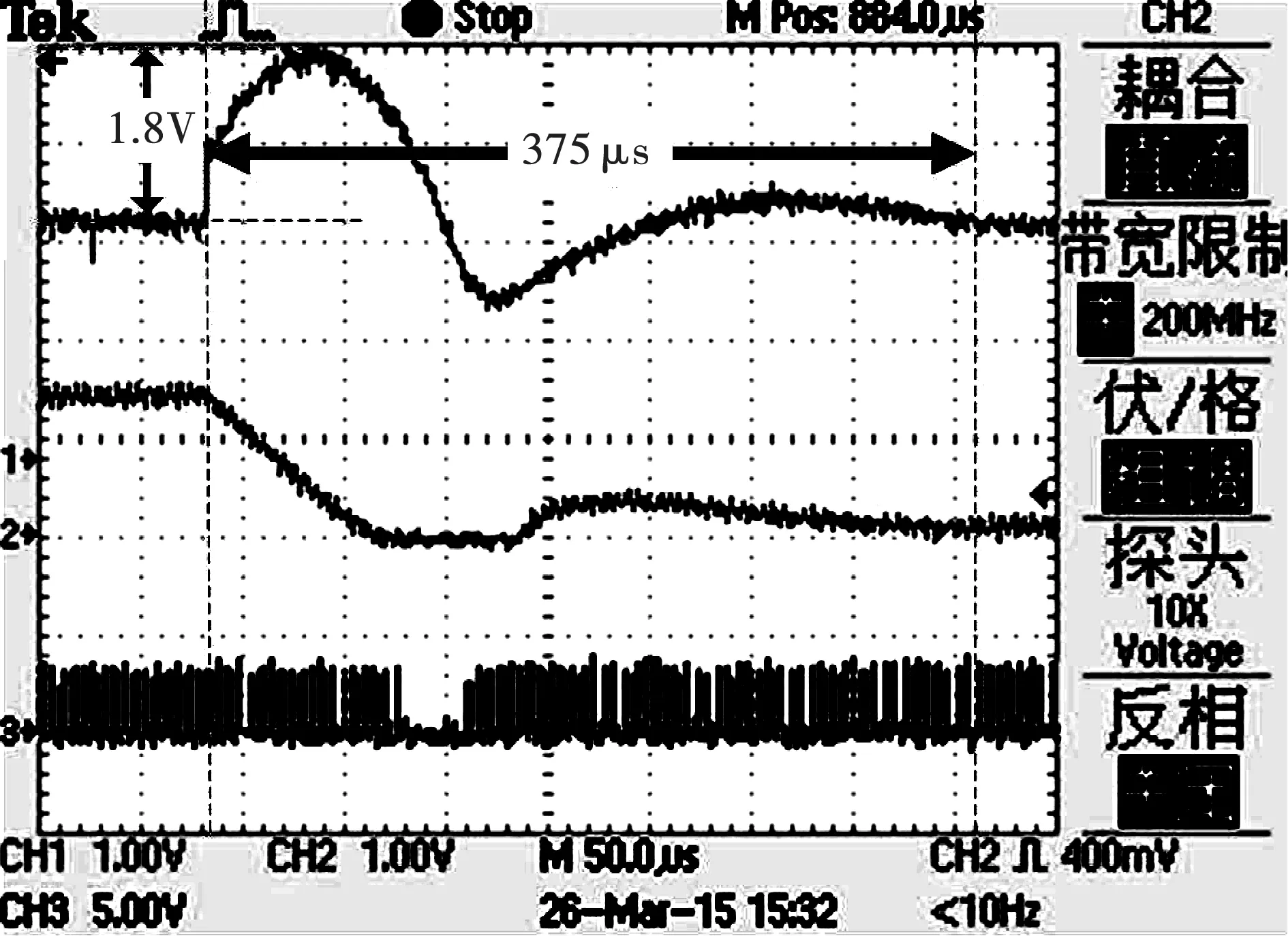
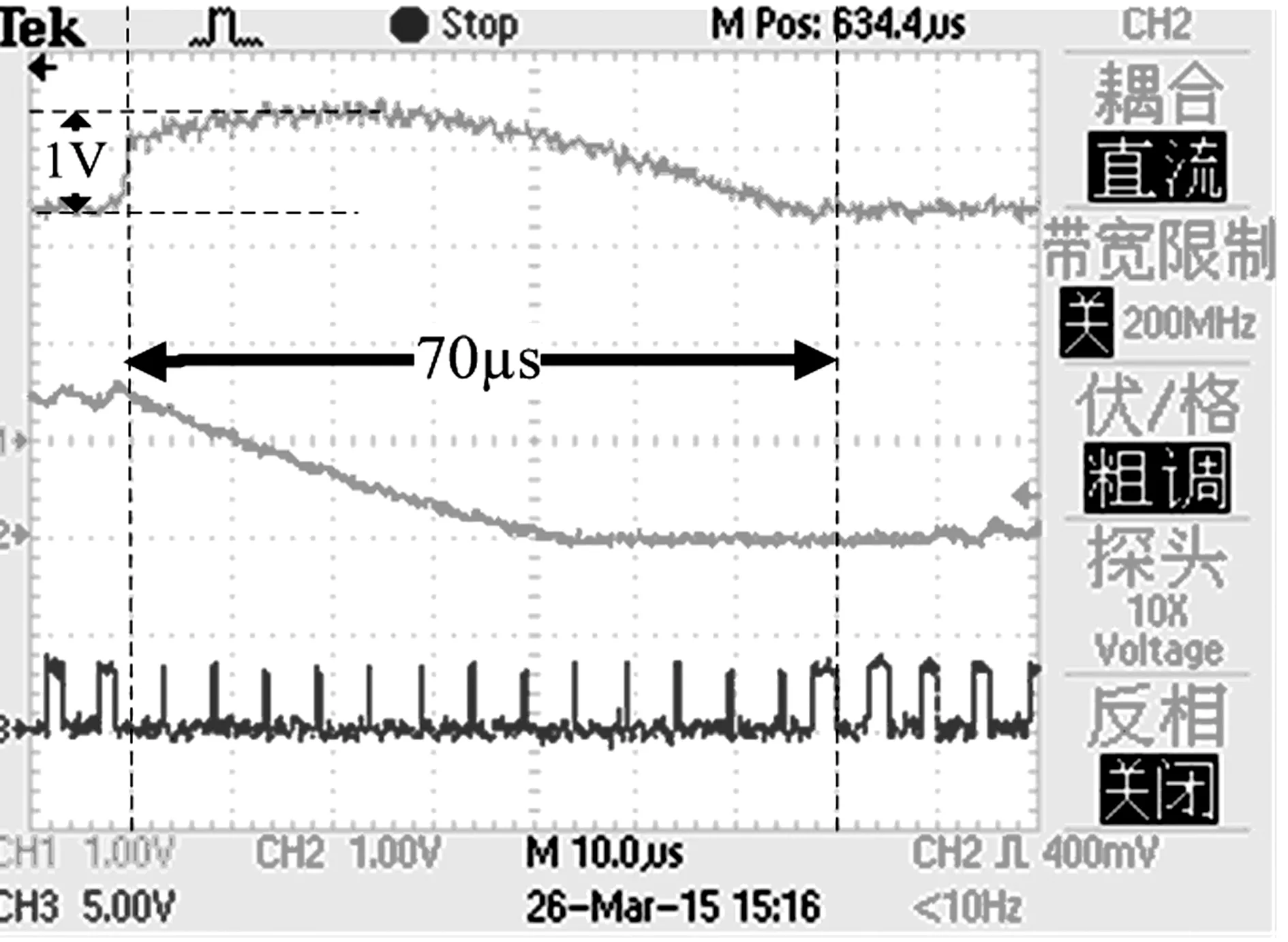
式(7)即为控制器的固定增益系数。0 1.2滑模控制的存在条件 对于DC/DC变换器,在每个开关阶段,运动轨迹都必须符合存在条件,使得其轨迹保持在滑模面的较小邻近范围,即 (8) 图1 同步整流BUCK变换器的比例 积分滑模控制器Fig.1 Proportional integral sliding mode controller for synchronous buck converter 将式(3)及其对时间的导数,即式(4)代入式(8)中,则有: (9) 将控制器的固定增益系数即式(7)代入式(9)中,可简化成 0 (10) 如果工作状态的最大或最小点满足条件,就可以充分说明整个工作状态的范围内,存在条件都可以得到满足。在设计具有稳态滑动面的滑模变结构控制器时,一种实用的方法是保证稳态时存在条件得到满足[5-6]。在这种情况下,Vo可用它们预期的稳态值代替,这种方法至少可以保证系统在原点周围的小区域内满足存在条件。考虑到上述情况,得出的存在条件为: (11) 其中:vi(min)和vi(max)为输入电压的最小值和最大值;vo(ss)为预期的稳态输出电压,实际上为直流参数,与期望参考电压Vref之间存在很小的误差;iL(max)、iL(min)、iC(max)和iC(min)分别为变换器满载时电感和电容电流的最大值和最小值。 最后,选取的控制器增益参数K1、K2和K3必须符合式(11)的2个不等式。这保证在指定输入和负载范围内的所有工作状态下,滑模运行的存在条件至少在原点的小区域内得到满足。 1.3滑模控制的稳定性条件 在BUCK变换器中,滑模变结构控制器的运动方程由电压和电流状态变量组成,具有高度的非线性且不易求解。采用等效控制方法[7-8],首先推导系统的理想滑模动态,随后进行平衡点分析,最后推导维持稳定的条件。 1.3.1理想滑模动态 所谓等效控制,就是用ueq来替换DC/DC变换器模型中的u,将不连续系统转换为理想滑模连续系统,即 (12) (13) 1.3.2平衡点分析 (14) 1.3.3理想滑模动态的线性化 将理想滑模动态在平衡点附近线性化,得 (15) (16) 其中: (17) 线性化系统的特征方程为 a11a22-a12a21=0。 (18) 若以下条件满足,则系统将稳定,即 (19) 存在条件式(11)、稳定性条件式(19)是根据变换器参数选择和设计滑模变结构控制器的基础。这些条件的满足保证了系统的闭环稳定性。 构建了基于FPGA的比例积分滑模控制Buck电路实验平台,进行实验研究,如图2所示。采用 CycloneIV系列EP4CE30芯片来实现Buck变换器的滑模变结构控制,从而证明滑模控制对系统参数变化和外部干扰具有很强的鲁棒性。BUCK变换器技术参数如表1所示。 图2 BUCK变换器实验平台Fig.2 Experimental platform of BUCK converter 参数额定值输入电压Vi/V12输出电压Vo/V2.4电容C/μF100电感L/μH15开关频率fS/kHz200最小负载电阻RL(min)/Ω0.3最大负载电阻RL(max)/Ω2.4 根据式(6)来设计基于FPGA verilog语言的滑模控制程序。其中滑模控制器的固定增益系数为K1=140,K2=5.5,K3=0.062 5。并且选取的K1,K2,K3满足存在条件式(11)、稳定性条件式(19)的设计约束。图3为稳态运行时的输出电压波形(CH1),电感电流波形(CH2)和控制开关运作的PWM波形(CH4)。通过波形可以看出,输出电压稳定于2.4 V,电感电流稳定于5.5 A,PWM波信号的开关频率为200 kHz。从实验结果可以看出设计的滑模控制器可以提供期望的输出电压和电感电流。 图3 基于比例积分滑模控制BUCK电路稳态输出波形Fig.3 Steady-state output waveform of the BUCK converter under proportional integral sliding-mode control 图4为基于滑模控制BUCK变换器在输入电压(CH1)从12 V跳变至24 V的输出电压波形(CH2)和PWM波形(CH4)。从实验结果图可以得出滑模控制在输入电压从12 V跳变至24 V,输出电压经过20 μs后稳定于2.4 V,而且输出电压的超调量只有0.4 V。 图4 滑模控制下输入电压跳变时的输出电压和PWM波Fig.4 Output voltage waveform and PWM of converter under a step input voltage changes under sliding mode control 图5和图6分别为双闭环PI控制和比例积分滑模控制在负载从1 A加载至7 A时的输出电压(CH1),电感电流波形(CH2)和控制开关管开通与关断的PWM波信号(CH3)。实验结果显示出双闭环PI控制时输出电压需经过218 μs才能稳定于2.4 V,而比例积分滑模控制时输出电压只需经过30 μs即可稳定。另外从实验图中可以看出双闭环PI控制的输出电压在加载时跌落了1 V,而比例积分滑模控制时的输出电压只跌落0.35 V。 图5 基于双闭环PI控制加载时的输出电压, 电感电流和PWM波信号Fig.5 Output voltage,inductor current waveform and PWM signals against load addition under double closed-loop PI control 图7和图8分别为双闭环PI控制和比例积分滑模控制在负载从7 A减载至1 A时的输出电压(CH1),电感电流波形(CH2)和控制开关管开通与关断的PWM波信号(CH3)。实验结果显示出双闭环PI控制时输出电压需经过375 μs才能稳定于期望值,而比例积分滑模控制时输出电压只需经过70 μs即可稳定。另外从实验图中可以看出双闭环PI控制在减载时,输出电压上升1.8 V,而比例积分滑模均流控制时的输出电压只上升1 V,并且电压、电流能够很快地进入到平衡状态,具有良好的动态性能。 图6 基于比例积分滑模控制加载时的输出电压、 电感电流和PWM波信号Fig.6 Output voltage and inductor current waveform and PWM signals against load addition under proportional integral sliding mode control 图7 基于双闭环PI控制减载时的输出电压, 电感电流和PWM波信号Fig.7 Output voltage,inductor current waveform and PWM signals against load subtraction under double closed-loop PI control 图8 基于滑模控制减载时的输出电压、 电感电流和PWM波信号Fig.8 Output voltage and inductor current waveform and PWM signals against load subtraction under sliding mode control 本文设计了基于BUCK电路的比例积分滑模控制,推导出了其存在条件和稳定性条件。在理论分析的基础上,通过搭建的实验平台验证了基于FPGA的比例积分滑模控制DC/DC变换器具有良好动态和稳态输出特性。另通过实验可以看出此比例积分滑模控制比双闭环PI控制对系统参数变化和外部干扰具有更好的鲁棒性。本文设计的滑模控制算法简单,且适合于PWM型DC/DC变换器系统。 [1]D.cortes,J Alvarez.Robust sliding mode control for the boost converter[C]//In proceeding of CIEP,Guadaiajara,Mexico,2002:208-212. [2]S.-C.Tan,Y.M.Lai,C.K.Tse.Indirect sliding mode control of power converters via double integral sliding surface[J].IEEE Transactions on Power Electronics,2008,23(2): 600-611. [4]R Giral,L Martinez.Compensating networks for sling-mode control[C]//In Proceedings of ISCAS,1995:2055-2058. [5]P.Mattavelli,L.Rossetto,G.Spiazzi,et al.General-purpose sliding mode controller for DC/DC converter applications[J].IEEE Power Electronics,1997,12(1):96-102. [6]H.Sira-Ramirez.Sliding mode-Δ modulation control of a Buck converter[C]// Proceedings of 42nd IEEE Conference on Decision and Control,2003:2999-3004. [7]S.C.Tan,Y.M.Lai,C.K.Tse,et al.A fixed-frequency pulse-width-modulation based quasi-sliding mode controller for buck converters[J].IEEE Transaction on Power Electronics,2005,20(6):1379-1392. [8]Mariano.Lopez,Luis Garicia .de Vicuna.Current distribution control design for paralleled DC/DC converters using sliding-mode control[J].IEEE Transactions on industrial Electronics,2004,10(51):419. [9]S.C.Tan,Y.M.Lai,C.K.Tse,et al.A pulse-width-modulation based integral sliding mode current controller for boost converters[C].In Proceedings of IEEE 37th Power Electronics Specialists Conference ,2006: 1-7. [10]B.J.Patella,A.Prodic,A.Zirger,et al.High-frequency digital PWM controller IC for DC-DC converter[J].IEEE transactions on Power Electronics,2003,18(1):43-46. [11]T Riesg,Y Torroja,E de la Torre.Design methodologies based on hardware description languages[J].IEEE Transactions on Industrial Electronics,1999,46(1):3-12. (编辑:张楠) Design of proportional integral sliding mode controller for DC-DC converter based on FPGA HUANG Xin,WANG Jian,CHEN Zong-xiang,LIU Yan-fei (School of Electric and Information Engineering,Anhui University of Technology,Maanshan 243000,China) In order to meet the dynamic and static performance requirements of the DC/DC Buck converter,a linear combination of the inductor current,the output voltage and their integral sliding mode surface was designed based on the state equation of the Buck converter,and the existence conditions and stability conditions of proportional integral sliding mode control were proved by using the sliding mode surface,and the experimental platform of Buck converter based on FPGA control was constructed and verified.According to this,the control of the Buck converter is realized by the proposed algorithm.Theoretical analysis and experimental results show that the sliding mode control possesses a better robustness against system parameter variation,power supply voltage variation and external disturbance compared with the conventional double closed-loop PI control method,and the converter could get high control precision and fast dynamic response. DC/DC Buck converter; sliding mode variable structure control; combination of sliding surface; better robustness; FPGA 2015-04-09 国家自然科学基金(51277003) 黄忻(1969—),女,博士研究生,实验师,研究方向为电力电子技术及其控制; 汪健(1992—),男,博士研究生,研究方向为电力电子与功率变换; 陈宗祥 10.15938/j.emc.2016.09.010 TM 46 A 1007-449X(2016)09-0067-06 陈宗祥(1975—),男,博士,副教授,硕士生导师,研究方向为电力电子技术与功率变换、电能质量治理; 刘雁飞(1962—),男,博士,教授,博士生导师,研究方向为DC-DC开关变换器、AC-DC变换器PFC技术。

2 实验结果
3 结 论
猜你喜欢
中国惯性技术学报(2019年6期)2019-03-04通信电源技术(2018年5期)2018-08-23通信电源技术(2018年5期)2018-08-23北京航空航天大学学报(2017年4期)2017-11-23黑龙江电力(2017年1期)2017-05-17北京航空航天大学学报(2016年7期)2016-11-16环境科技(2016年5期)2016-11-10电测与仪表(2016年12期)2016-04-11河北地质(2016年4期)2016-03-20北京航空航天大学学报(2016年4期)2016-02-27