永磁同步电机全速范围无速度传感器控制
2016-10-11 09:02胡庆波孙春媛
电机与控制学报 2016年9期
胡庆波,孙春媛
(1.宁波乐邦电气有限公司,浙江 宁波 315113;2.宁波城市职业技术学院 商贸学院,浙江 宁波 315100)
永磁同步电机全速范围无速度传感器控制
胡庆波1,孙春媛2
(1.宁波乐邦电气有限公司,浙江 宁波 315113;2.宁波城市职业技术学院 商贸学院,浙江 宁波 315100)
针对永磁同步电机在无速度传感器控制时,从低速开环运行切换到高速闭环运行过程中存在转矩脉动大的问题,提出一种新的矢量控制切换技术。依据永磁电机转矩自平衡原理,采用自适应PI控制电机给定转矩电流分量。当I/F流频法控制下给定转矩电流接近负载电流时,将系统从I/F开环运行切换到速度电流双闭环模式。提出的新方案能够使矢量控制切换过程的速度和转矩平滑过渡,可适用于不同类型的永磁电机和负载工况。实验证明:该控制方案具有结构简单,易于实现,同时具有较强的通用性和鲁棒性。
永磁同步电机;无速度传感器控制;假定旋转坐标; 自适应PI;转矩电流;状态切换
0 引 言
永磁同步电机具有体积小、功率密度大、效率高、结构简单、噪音低以及动态响应快等优点,已经在电动汽车、空调压缩机、电梯、抽油机等领域获得了广泛的应用。通常情况下,永磁电机通过编码器反馈获得速度信号后进行闭环控制。然而在很多应用场合下,编码器不仅增加了安装、维护成本,也使驱动系统易受外界环境干扰,降低了系统的可靠性。为了提高运行效率,降低运营成本,增强在特殊工况下的可靠性,采用无位置传感器开环矢量[1-3]控制方式的驱动系统是永磁电机控制技术发展的主流趋势。
目前,基于永磁同步电机的无速度控制算法研究主要集中在3大类:1)基于电机本体特性的方法,如凸极效应[4];2)基于电机反电动势的估算方法[5];3)基于状态观测器、滑模观测器、卡尔曼滤波器的估算方法[6-8]。利用反电动势的估算方法实现较为简单,有直接计算法和假定旋转坐标法[9](hypothetical reference frame,HRF)等,这类方法在电动机高速运行时非常有效。而当电机低速或零速启动时由于反电动势太小会造成很大的误差,严重时无法正常旋转。而利用电机凸极效应估算转子位置的方法,如高频注入法,一般用于低速或零速启动,高速时由于注入的高频信号较高,很难用数字控制器来实现。另外这种算法原理上是利用电机交直轴电感的不对称来获得位置信号,因此依赖电机结构参数,不具备普适性。基于各种观测器的估测算法具有较好的鲁棒性,同时适用于高低速,但实时计算量大,对微处理器性能的依赖程度高,动态响应速度要差于前两者。
综上所述,虽然众多专家学者提出了大量的无传感器控制算法,但每种算法都存在一定的局限性。要在全速度范围内实现开环矢量控制需要结合两种或以上的控制策略[10-11],由此带来的问题是如何在算法之间实现平稳的切换,这是本文的研究重点。实际产品应用中,通常的做法是通过开环控制将电机拖动到一定速度后,再采用反电动势估计的方法获得速度和位置信号。但需要考虑的是在这两种控制方式切换时,如何实现平稳的转矩过渡,速度控制不能出现突变。本文提出了一种基于自适应PI控制的状态切换方法,通过控制电机转矩电流分量,将电机从I/F流频法平稳的切换到假定旋转坐标法中。
1 I/F流频法开环驱动

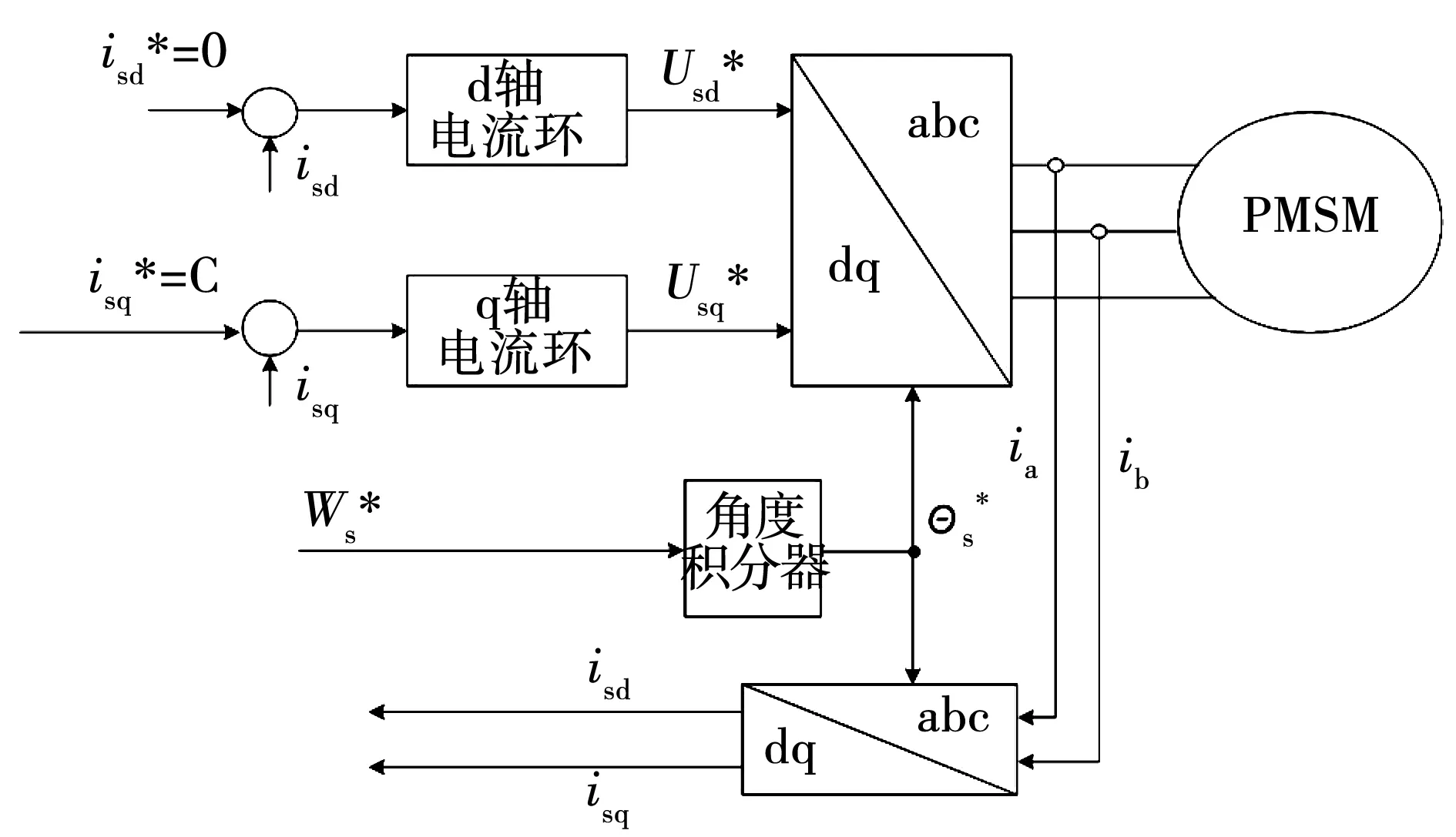
图1 I/F流频法控制框图Fig.1 Block diagram of I/F control
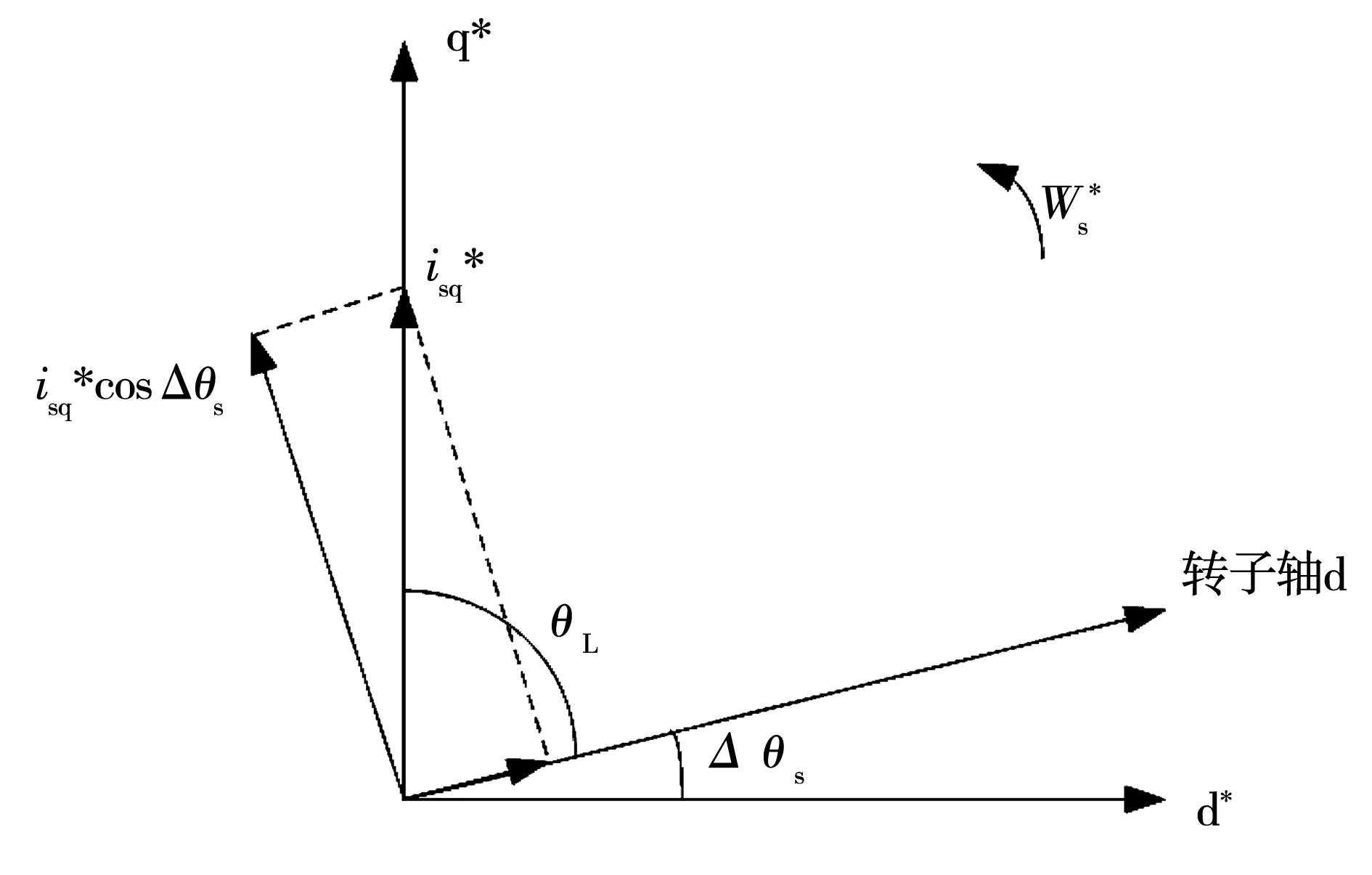
图2 I/F控制下矢量图Fig.2 Vector figure of I/F control
2 假定旋转坐标法原理
由假定旋转坐标法进行转速估算的永磁同步电机矢量控制框图如图3所示。图中转速估算部分是无传感器矢量控制系统的核心,它由两部分组成,第一部分是由电机反电动势计算而来,第二部分由自适应PI控制器输出,两部分相加获得电机同步转速的估计值。整个控制系统采用速度、电流双闭环的工作模式,其中速度环输出作为转矩电流的给定值,励磁电流给定值为0,两个电流环输出即为电压矢量值,经空间矢量发生器后获得三相全桥的驱动信号用于控制功率器件。
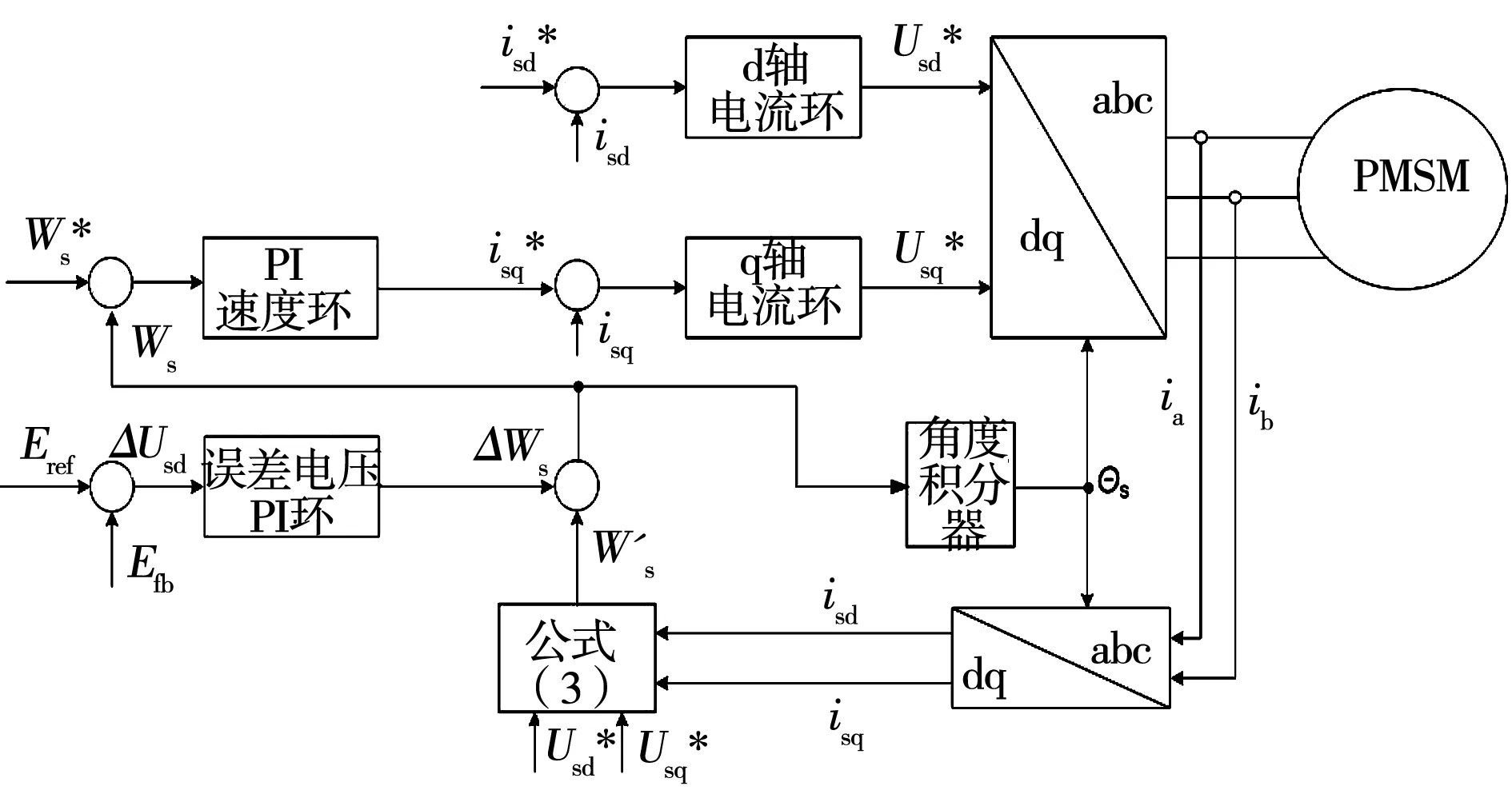
图3 HRF无速度控制方案Fig.3 Block diagram of HRF sensorless control
下面简要介绍一下控制原理,式(1)是同步旋转坐标下的电机电压方程为

(1)
式中:isd、isq、usd、usq分别是dq轴的电流和电压矢量;R是相电阻;Ld、Lq分别是dq轴电感;ωs是同步转速;p是微分算子;ψr是永磁体磁链,Δθs是同步旋转坐标系与转子轴的夹角(转子轴沿转向超前同步旋转坐标时为正)。理想情况下Δθs=0,此时估算的转子位置和实际转子轴对齐,式(1)可变为

(2)
由上式获得速度的估计值为
(3)
Δusd=ωsψrsin(Δθs)。
(4)
当Δθs较小时,sin(Δθs)≈Δθs,由此可知Δusd与Δθs成正比,对电压误差Δusd进行PI调节即可获得速度估计的修正量为
Δωs=kωpΔusd+kωi∫Δusddt。
(5)
其中kωp、kωi分别是比例和积分系数,用修正量Δωs去调整估计转速可以使位置偏差收敛。式(5)中的电压偏差为

(6)

(7)
(8)
由于假定旋转坐标法是基于电机反电势模型建立的,当电机处于启动及低速运行时反电势较小,运算误差较大,会出现电机抖动甚至无法转动的情况。因此本文的无速度控制方案在启动和低速运行时采用I/F流频法控制,中高速采用假定旋转坐标法。两种模式直接切换必然会造成转矩和转速的异常波动,实际应用中必须加以避免。
3 状态切换过程分析
3.1直接切换法


3.2基于自适应PI控制的转矩电流调整法
HRF原理介绍中,式(5)的自适应PI目的是将Δθs控制到0,这与状态切换的目标一致。因此在I/F控制时,可通过式(5)、式(6)获得给定转矩电流的增量,式(5)变为式(9),给定的转矩电流如式(10)所示,其中C是初始电流值。
Δisq=kωpΔusd+kωi∫Δusddt,
(9)

(10)
考虑到电机参数、采样控制精度以及PI参数造成偏差的存在,将切换点定在Δθs=0时会出现电机抖动的现象,故将式(6)变为

(11)
其中θ0表示切换时的定位角,θ0∈(0°~90°)。
状态切换和HRF运行时采用了相同的自适应PI结构,同样的调节器参数。但式(6)和式(11)的Δusd发生了变化,由此可能会造成电机抖动或转矩突变。因此在HRF正常运行前设置t1,在该时间内将式(11)的θ0从设定值θc线性变为0°。
(12)

4 实 验
实验在6.89 kW电梯用永磁同步电机机组上采用对拖的方式进行,电机参数见表1。选用STM32F103RC为主控芯片,直流电压、相电流均通过采样电阻并经光耦隔离后获得。给定转矩电流设为16 A,状态切换速度ωc设为18.8 r/min,并取θc=30°。直接切换时给定速度大于ωc后立即切换到HRF控制,而自适应PI控制切换时给定速度在ωc处先保持匀速,在完成切换后继续加速运行。

表1 永磁同步电机参数
4.1轻载实验
图4、图5分别是电机轻载运行时,状态直接切换和采用自适应PI控制下的相电流波形。可以看出图4由于切换时给定坐标轴与转子真实位置存在较大的偏差,直接进入速度闭环控制后存在很大的电流冲击,且动态调整时间较长。图5在切换时转矩电流已经接近于负载电流,切换较快并且电流无明显畸变。
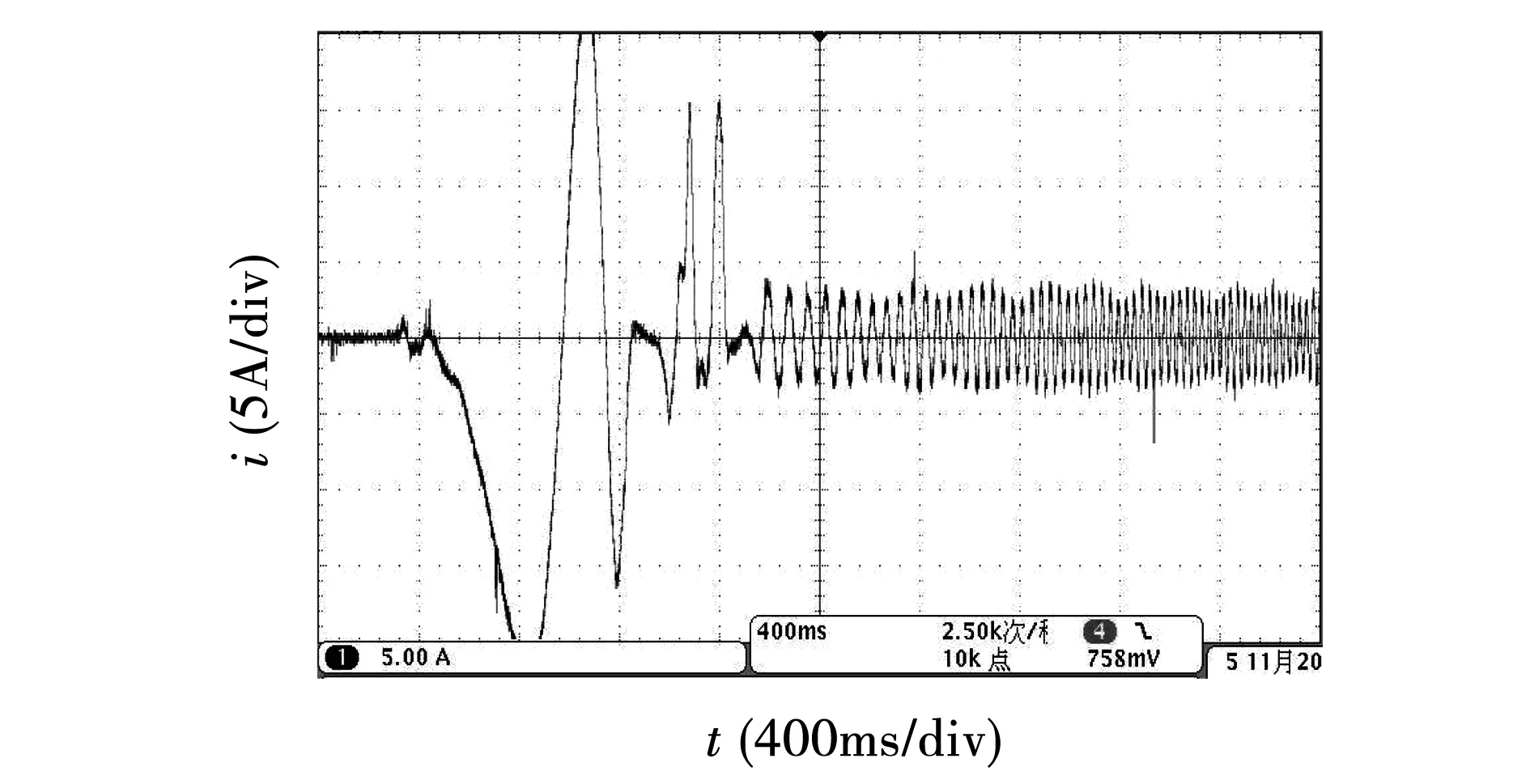
图4 轻载直接切换相电流Fig.4 Direct switching current,light load
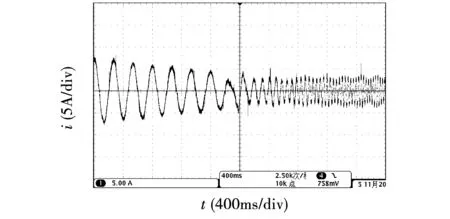
图5 轻载PI控制切换相电流Fig.5 PI control current,light load
4.2重载实验
图6、图7分别是电机在重载运行时,状态直接切换和采用自适应PI控制下的相电流波形。由于此时给定转矩电流已经接近于负载电流,两种情况下切换时电流变化不明显。
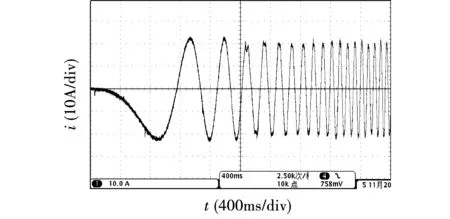
图6 重载直接切换相电流Fig.6 Direct switching current,heavy load
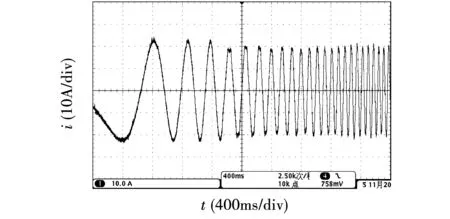
图7 重载PI控制切换相电流Fig.7 PI control current,heavy load
4.3电机参数实验

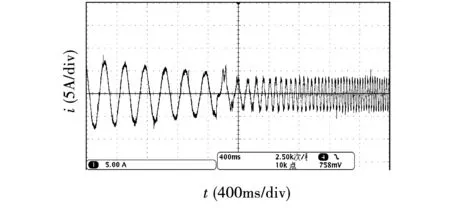
图8 轻载Lq设为0时切换相电流Fig.8 Current with Lq=0,light load
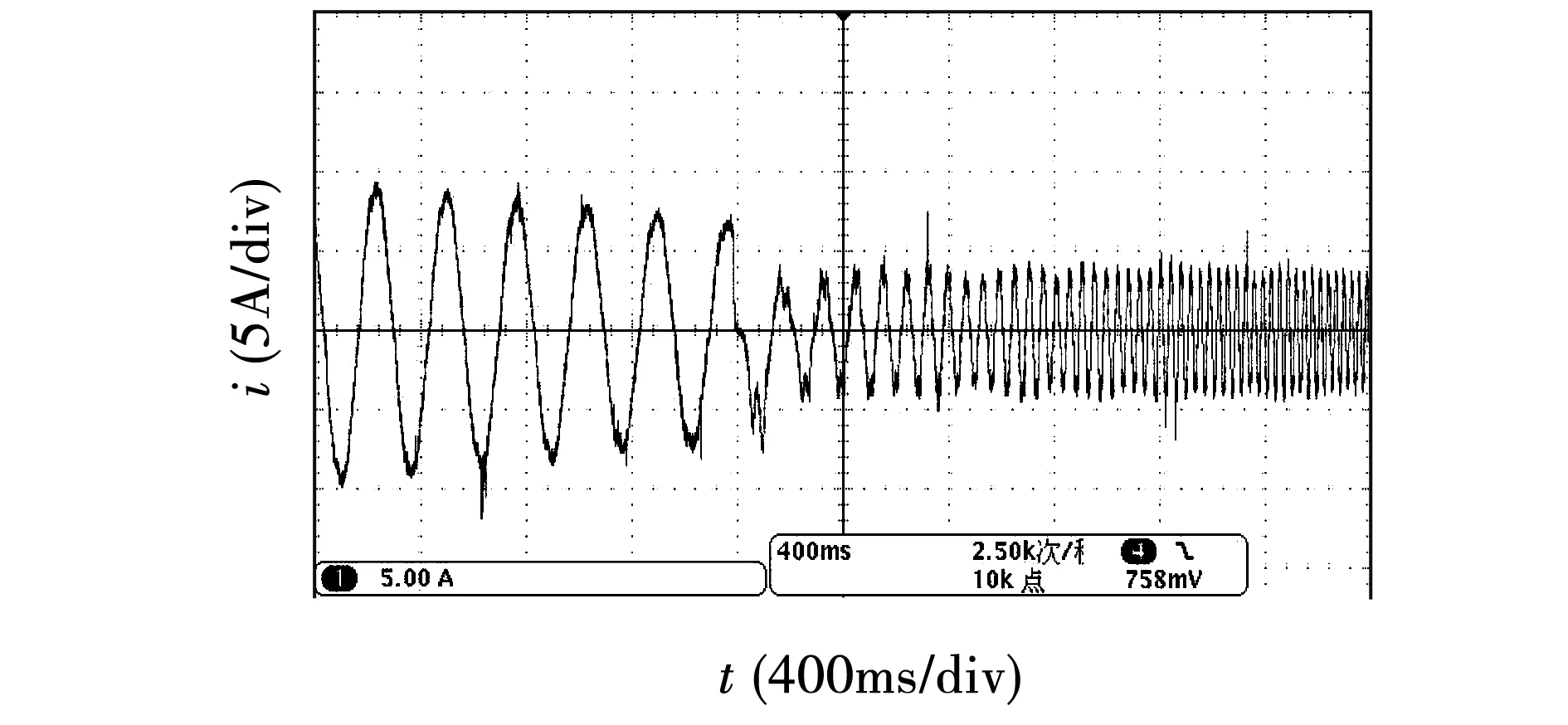
图9 轻载Lq设为时切换相电流Fig.9 Current with ,light load
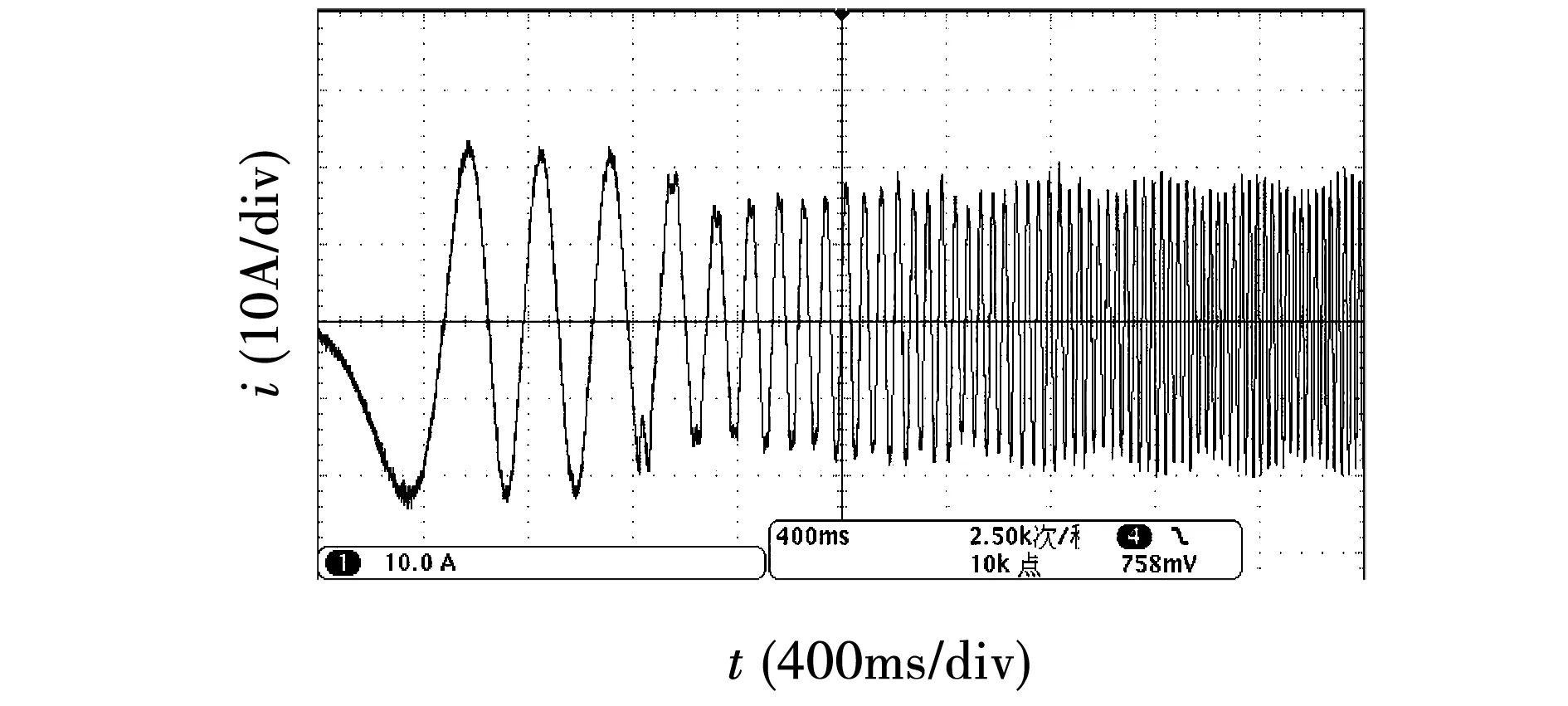
图10 重载Lq设为0时切换相电流Fig.10 Current with Lq=0,heavy load
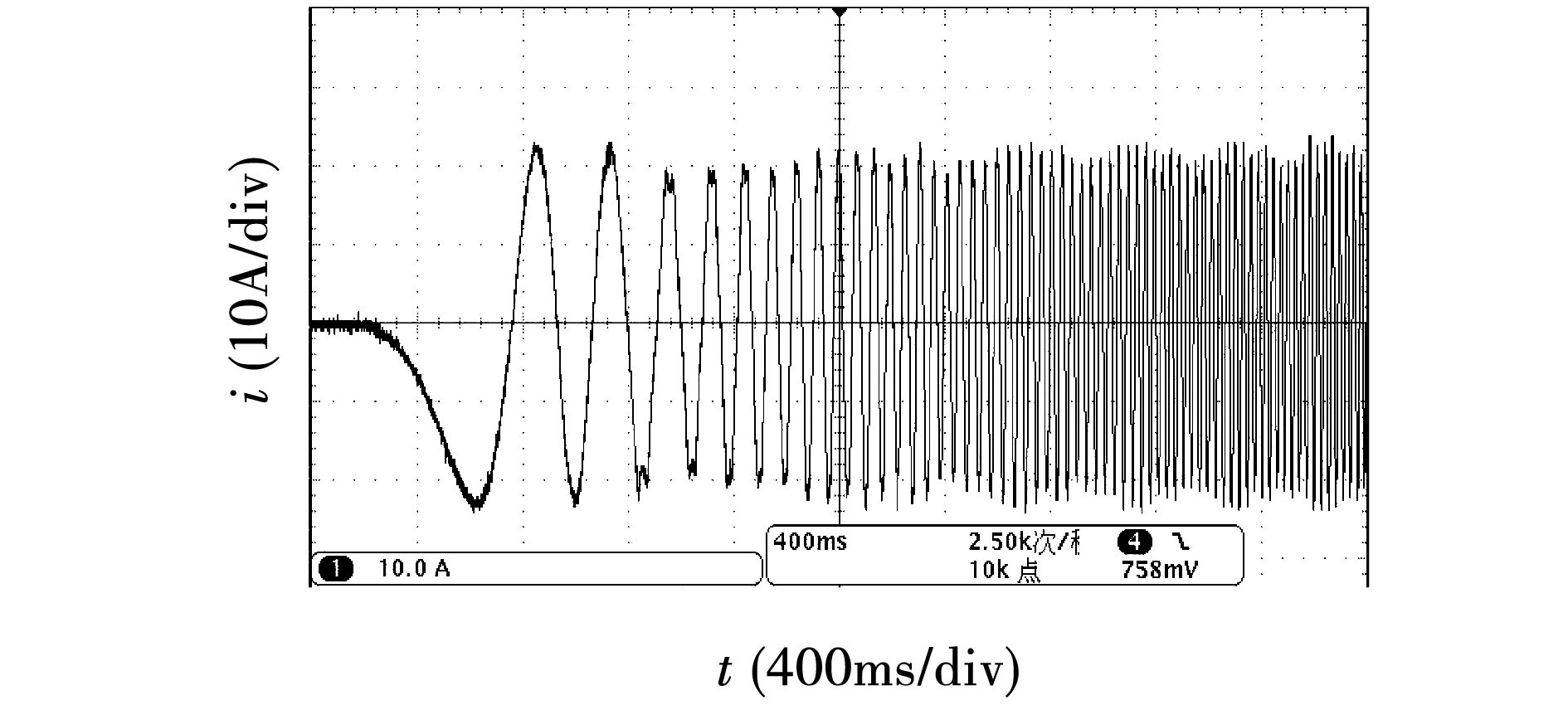
图11 重载Lq设为时切换相电流Fig.11 Current ,heavy load
5 结 论
本文提出的永磁同步电机全速范围运行算法,可用于风机、水泵以及空气压缩机等负载的应用场合。该方案的特点在于:启动和低速时采用速度开环、电流闭环的I/F流频法控制方式,高速时采用假定旋转坐标法,通过自适应PI控制电机转矩电流来实现控制模式的平稳切换。提出的自适应方案无需调整控制参数即可适用于不同的负载工况下,具有很强的实用性。在状态切换过程中,通过减少给定转矩电流并根据永磁电机转矩自平衡原理实现负载匹配。当满足切换条件后电机能够很平顺的从I/F运行状态向HRF闭环状态过渡,其速度、转矩平滑无冲击。另外本文的方案不区分表贴式还是内嵌式电机,对所有永磁电机均适用,并对电机自身参数变化不敏感,具有很强的鲁棒性。
[1]高宏伟,于艳君,柴凤,等.基于载波频率成分法的内置式永磁同步电机无位置传感器控制[J].中国电机工程学报,2010,30(18): 91-96.
GAO Hongwei,YU Yanjun,CHAI Feng,et al.Position sensorless control of interior permanent magnet synchronous motor based on carrier frequency component method[J].Proceedings of the CSEE,2010,30(18): 91-96.
[2]王斌,王跃,王兆安.无速度传感器的永磁同步电机无差拍直接转矩控制方法[J].电机与控制学报,2014,18(6): 42-49.
WANG Bin,WANG Yue,WANG Zhaoan.Deadbeat direct torque control of permanent magnet synchronous motor without speed sensor[J].Electric Machines and Control,2014,18(6): 42-49.
[3]尚喆,赵荣祥,窦汝振.基于自适应滑模观测器的永磁同步电机无速度传感器控制研究[J].中国电机工程学报,2007,27(3): 23-27.
SHANG Zhe,ZHAO Rongxiang,DOU Ruzhen.Research on sensorless control method of PMSM based on an adaptive sliding mode observer[J].Proceedings of the CSEE,2007,27(3): 23-27.
[4]何栋炜,彭侠夫,蒋学程,等.内置式永磁同步电机转子初始位置估计方法[J].电机与控制学报,2013,17(3): 49-55.
HE Dongwei,PENG Xiafu,JIANG Xuecheng,et al.Initial rotor position estimation method for IPMSM[J].Electric Machines and Control,2013,17(3): 49-55.
[5]GENDUSO F,MICELI R,RANDO C,et al.Back EMF sensorless-control algorithm for high-dynamic performance PMSM[J].IEEE Transaction on Industrial Applications,2010,57(6): 2092-2100.
[6]张兴,郭磊磊,杨淑英,等.永磁同步发电机无速度传感器控制[J].中国电机工程学报,2014,34(21): 3440-3447.
ZHANG Xing,GUO Leilei,YANG Shuying,et al.Speed sensorless control of permanent magnet synchronous generators[J].Proceedings of the CSEE,2014,34(21): 3440-3447.
[7]张磊,高春侠.一种变增益宽速度范围的永磁同步电机无位置传感器控制[J].电机与控制学报,2015,19(8): 36-40.
ZHANG Lei,GAO Chunxia.Research on variable gain wide speed region sensor-less control theme for permanent magnet synchronous motors[J].Electric Machines and Control,2015,19(8): 36-40.
[8]张猛,肖曦,李永东.基于扩展卡尔曼滤波器的永磁同步电机转速和磁链观测器[J].中国电机工程学报,2007,27(36): 36-40.
ZHANG Meng,XIAO Xi,LI Yongdong.Speed and flux linkage observer for permanent magnet synchronous motor based on EKF[J].Proceedings of the CSEE,2007,27(36): 36-40.
[9]纪历,徐龙祥.高速永磁同步电机无传感器控制[J].电机与控制学报,2011,15(9): 24-30.
JI Li,XU Longxiang.Sensorless control of high speed permanent magnet synchronous motor[J].Electric Machines and Control,2011,15(9): 24-30.
[10]张磊,高春侠.改进型永磁同步电机全速度范围内无速度传感器控制策略[J].电机与控制学报,2012,16(7): 103-110.
ZHANG Lei,GAO Chunxia.An improved whole speed region sensorless control theme for permanent magnet synchronous motors[J].Electric Machines and Control,2012,16(7): 103-110.
[11]FATU M,TEODORESCU R,BOLDEA I,et al.I-F starting method with smooth transition to EMF based motion-sensorless vector control of PM synchronous motor/generator[C] //2008 IEEE International Conference on Power Electronics Specialist,June 15-19,2008,Rhodes,Greece.2008:1481-1487.
[12]王子辉,叶云岳.反电势算法的永磁同步电机无位置传感器自启动过程[J].电机与控制学报,2011,15(10): 36-42.
WANG Zihui,YE Yunyue.Research on self-startup states process of back-EMF based sensorless vector control of PMSM[J].Electric Machines and Control,2011,15(10): 36-42.
(编辑:刘琳琳)
Sensorless control of permanent magnet synchronous motor in full speed range
HU Qing-bo1,SUN Chun-yuan2
(1.Ningbo Robust Electric Company Limited,Ningbo 315113,China;2.Department of Business and Trade,Ningbo City College of Vocational Technology,Ningbo 315100,China)
In order to solve the problem of large torque ripple from the speed-open-loop current-close-loop state to the double-closed-loops state of the permanent magnet synchronous motor (PMSM),a novel field oriented control method was proposed.According to the PMSM torque self-stabilization principle,the adaptive PI control of motor torque current was given.When the given torque current was close to the load current,the I/F control was switched to the speed and current double-closed-loop mode.The proposed new scheme makes speed and torque smooth transition while switching,and is suitable for all types of PMSM under different load conditions.Experimental results show that the proposed scheme has the advantages of simple structure,easy realization,also has the versatility and robustness.
permanent magnet synchronous motor; sensorless control; hypothetical reference frame; adaptive PI; torque current; state transition process
2014-12-03
胡庆波(1979—),男,博士,高级工程师,研究方向为永磁同步电机的驱动技术、风力发电的变流技术等;
孙春媛(1981—),女,硕士,讲师,研究方向为智慧能源及其相关产业。
胡庆波
10.15938/j.emc.2016.09.011
TM 46
A
1007-449X(2016)09-0073-07
猜你喜欢
电工技术学报(2022年20期)2022-10-29
重庆理工大学学报(自然科学)(2022年5期)2022-06-18
防爆电机(2022年3期)2022-06-17
微电机(2022年1期)2022-03-21
上海大中型电机(2021年2期)2021-07-21
防爆电机(2021年2期)2021-06-09
防爆电机(2020年6期)2020-12-14
客车技术与研究(2015年3期)2015-08-24
组合机床与自动化加工技术(2014年12期)2014-03-01
汽车电器(2014年8期)2014-02-28