基于ARM—STM32F030x4的变电站日常巡视机器人研究
2016-11-21 22:02吕剑罗天宇叶宣廷
中国高新技术企业 2016年29期
关键词:变电站
吕剑+罗天宇+叶宣廷


摘要:根据变电站巡视要求,提出一套机器人巡视的框架。文章着重讨论各个模块的算法,并根据各个算法,找到合适的硬件实现每个功能,以解决巡视中可能出现的问题,提高巡视效率和可靠性。处理器反面采用了最新的ARM-STM32F030x4,以保障各个功能的实现,方便添加新增功能。
关键词:变电站;巡检机器人;STM32F030x4;栅格化算法;自动充电 文献标识码:A
中图分类号:TP242 文章编号:1009-2374(2016)29-0015-03 DOI:10.13535/j.cnki.11-4406/n.2016.29.007
今时今日,自动控制技术、传感器技术、电子通讯技术以及人工智能等多种学科发展已具备相当规模,机器人技术在各个领域的运用已日渐成熟。
在智能机器人代替成本日益上升的人工作业的大背景下,变电站自动化的探索日益紧迫。这就是本次变电站日常巡视机器人研究的初衷。
1 变电站巡视要求
变电站巡视包括巡视区域、巡视路线、巡视重要点和巡视设备。巡视区域设定在变电站内部,当区域较大时可以根据设备运行情况将巡视区域分为几个小块。巡视路线根据当地区县相关人员巡视规定和实际路线情况进行编制。巡视重要点是指巡视路线中需要停靠的点,需要注意停靠时间和摄像头角度。巡视设备是巡视的基本对象,包括变压器、开关、避雷器、母线等。
2 机器人内部硬件架构
变电站巡检机器人内部硬件架构分为驱动电机、微控制器、传感器、无线传输器这四个部分组成。
2.1 驱动电机
采用的是永磁式步进电机,分别位于机器人的左侧和右侧。电机的驱动芯片为BA6845FS,与系统通过电池的输出电压直接连接。
2.2 微控制器
采用的是ARM-STM32F030x4。该芯片由德国ST公司开发,64组管脚定义可实现包括WIFI传输控制、电机运动控制、电池电量检测、传感器控制等一系列功能。调试器使用的是ST-Link(v2 SWD模式)芯片晶振采用16M/32M/48M晶振,可实现纳秒级别的精确计算,以做到驱动控制的准确无误;闪存上可实现32bits,速度基本凌驾于市面上CPU处理器,在智能机器人的控制方面更为适合;内核温度可承受150℃,除去自身发热源,可承载环境温度120℃,安全级别达到了汽车安全级别,保证了机器人的安全稳定运行;芯片设有施密德触发特效,能有效保障机器人在变电站这种高频的电磁波以及大电流这些EMC的干扰较大的场合中稳定运行。为了确保长期稳定运行,CPU安全级别以及驱动回路的抗干扰性将是我们在选择设计时必须重点考虑的事项,而ARM-STM32F030x4将施密特性集成于微控制器内部要比在芯片外面施加保护来得更加安全。除此之外,微控制处理器ARM-STM32F030x4采用双向CAN,可以实现一路为传感器读写CAN,一路为检修CAN,为区分可以称为FCAN以及PCAN,FCAN可以实时与传感器交互数据,我们利用PCAN可以对CPU运行数据实时监测以及备份。
2.3 传感器
红外传感器共四个,1号、4号位于机器人左前方和右前方,2号、3号位于前端。型号是IRM8601S。传感器内部集成自动增益控制电路、输出驱动电路、解码电路及带通滤波电路。该接头最为有效的红外线信号的载波频率为38kHz。当它检测到有效红外线信号时输出低电平,未检测到则输出高电平。
2.4 无线传输器
WIFI通信的硬件方面使用的是TPLINK无线网卡和全向天线,并使用TRF6903芯片处理收发信息。架构如图1所示:
3 机器人运行软件模块
3.1 路线以及环境模块
在确定好巡视路线的情况下,就要建立环境模型并且优化机器人巡视路径。
在众多环境建模方法中,我们选择了栅格法进行建模。其优点为计算量较小,容易加入更新的内容,符合变电站环境搜索的各类要求。
栅格法(Cell Modeling Method)的基本原理是地图建模的一种方法,栅格法实质上是将工作环境进行单元分割,将其用大小相等的方块表示出来。
将变电站进行栅格化建模后,就要建立机器人的“记忆库”进行路径的制定。为了把上下左右四个方向参数类型转换为微型控制器能够识别的符号,我们将向上的方向定义为0、向右为1、向下为2、向左为3,如图2所示:
机器人头部传感器的位置和方向相对于机器人是不动的。而相对于变电站的环境来说,它们的方向是在改变的,这就涉及到“绝对方向”和“相对方向”问题。
相对方向:以机器人当前行走方向为参照的方向。
绝对方向:以变电站绝对坐标平面为参照的方向。
这样就会涉及到相对方向和绝对方向的互换的问题。在本文中采取了以变量Dir记录机器人前进方向上的绝对方向值,即前方的绝对方向值始终设为Dir,这样机器人的相对方向转换成绝对方向。如表1所示:
转换为坐标显示,初始点为(0,0)机器人会将走过的路线坐标进行储存。如表2所示:
以临海市110kV镜都变为例,图4为实景模拟图,黑色部分为根据相关规定设计的机器人巡视路线。如图3所示:
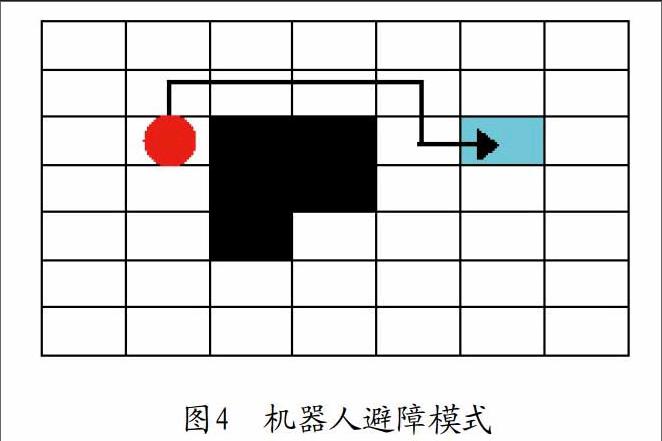
3.2 避障模块
当机器人在变电站自动巡检时,可能会出现计划外的障碍物挡在原来设定的路线上,这就需要设定机器人自动避障模块以减少操作人员的操作。其原理如下:机器人在O点探测到静态障碍物,考虑静态障碍物相对于机器人的方向(在O点,将方向归为四类:右方、上方、左方、下方,在其余点,方向仍然分为八类)。设机器人在O处的位置为(xo,yo),局部子目标Pgoal位置为(xp,yp)。
(1)障碍物在右方:如果yp≥yo,机器人做逆时针运动;如果yp
猜你喜欢
电子制作(2019年10期)2019-06-17
电子制作(2018年8期)2018-06-26
电子制作(2017年8期)2017-06-05
电子制作(2017年24期)2017-02-02
电子制作(2016年19期)2016-08-24
现代工业经济和信息化(2016年5期)2016-05-17
东北电力技术(2016年2期)2016-05-17
河南电力(2015年5期)2015-06-08
中国工程咨询(2015年10期)2015-02-14
水电站机电技术(2014年1期)2014-09-26