
基于边缘提取和Hough变换的快速车道线检测
2016-12-20 02:45黄建宇
决策与信息 2016年32期
黄建宇
江苏大学汽车与交通工程学院 江苏镇江 212013
基于边缘提取和Hough变换的快速车道线检测
黄建宇
江苏大学汽车与交通工程学院 江苏镇江 212013
针对传统车道线检测技术易受拍摄环境影响这一问题,突出一种新的车道线检测方法。通过对原始RGB图像进行灰度化处理,利用自定义差分算子进行车道线边缘提取,最后通过Hough变换实现车道线提取。该算法有效滤除图像中干扰因素的影响,在复杂的环境中获得较好的检测结果,增强图像处理的鲁棒性。
车道线检测;图像灰度化;边缘检测;Hough变换
一、前言
车道线检测是通过摄像装备获得图像,再通过车道线识别技术将车道线与背景进行分离,从而获得车道线的走向等信息。目前,国内外常用的检测方法有:Hough变换,匹配模板,粒子滤波,形态学等。其中,Hough变换具有抗噪性能好,算法稳定等优点。
当前,国内外学者对车道线检测进行过大量研究,但大都将改进点定位于Hough变换,旨在减少识别过程中的计算量,提高识别效率,而忽略了对拍摄图像的前处理的改进。本文首先将拍摄的RGB图像进行灰度化处理,再利用自定义的差分算子进行边缘提取,最后利用Hough变换实现车道线的检测。
二、道路图像灰度化
图像的灰度化是指把彩色图像变换成灰度图像的过程。由于亮度信息由暗到明是连续变化的,所以要描述图像的灰度图,就需要把亮度值进行量化。通常划分成 0~255 ,共256个级别,0 表示全黑,255 表示全白。1~254 则表示介于全黑和全白之间的不同亮度。一般有以下四种灰度化的方法:分量法,最大值法,平均值法,加权平均法等,鉴于人眼对绿色敏感度最高而对蓝色敏感度最低这一视觉特性,本文选取加权平均法对图像进行灰度化。
三、道路图像边缘检测
考虑到车道线的在图像中的方向特征,即左右车道线倾斜角度一般分别是 45°和 135°方向,本文自定义了两个差分算子。对平滑处理后的图像用这两个差分算子对道路图像做微分计算,就得到了道路图像的边缘。
四、Hough变换检测车道线
在车道线直线提取算法中,Hough 变换是最常用的方法之一,且快速车道基本上是直线,弯道较少,适合采用Hough变换检测车道线。
Hough 直线变换的原理是利用点线的对偶性来实现的,即:把图像空间中检测直线的问题转变为参数空间里检测点的问题。为了解决垂直直线斜率无限大的问题,一般通过如下的直线变换,即:

其中ρ代表直线到原点的法线距离,θ为该法线对应 x轴的角度。
对信息融合后的图像进行 Hough 变换,为了避免背景上的建筑等其他物体也可能存在直线而造成误判断的情况。本文设置一个阈值 L,当检测出一条直线时,将其长度与阈值 L 作比较,当直线长度大于 L 时,则认为是一条车道线,并保存直线的斜率、截距、起点和终点四个元素,并作标记;小于阈值 L 时,则舍弃。这样就很好的排除短小噪声直线的干扰。
在这里,我们把边缘检测出来的图像进行Hough变换得到车道线在极坐标系下的参数,然后再把这些参数绘制成图1:
从图中我们可以统计出这些曲线的重叠情况,然后根据统计值进行判断直线所在位置,并在原图中对直线进行标识。如图6所示:
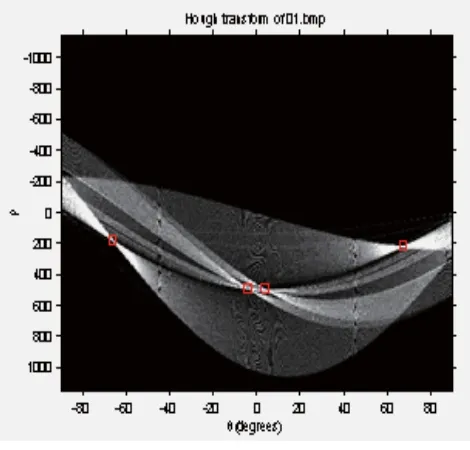
图1 参数空间曲线图像
五、结论
对拍摄图像进行灰度化处理和中值滤波减小图像处理的工作量和噪音,再利用自定义差分算子对灰度图像进行边缘提取,最后利用Hough变换实现快速车道线检测,仿真结果显示,该方法有效的滤除了环境因素对车道线检测的影响,降低了误差,鲁棒性较强。
[1]王荣本,李斌.世界智能车辆行驶安全保障技术的研究进展[J].公路交通科技,2002,19(2):80-85.
[2] 余人洪.基丁机器视觉的车道偏离预警系统研究[D].吉林:吉林大孕交通学院,2006.
[3]Morten Welde,James Odeek. Evaluating the Economic Impacts of Intelligent TransportSystems. Proceedings of the 14th World congress on Intelligent Transport System,2007:2028.
[4]Guoqiang Zhang, Jian Lu,Qiaojun Xiang. Implementation of Intelligent TransportationSystems based paratransit services in China. Proceedings of the 14th World congress onIntelligent Transport System, 2007: 3032.
[5]Xiaoxiong Weng,GuangzhaiLuo. Intelligent Traffic Information Systems based on featureof traffic flow.Proceedings of the 14th World congress on Intelligent Transport System,2007:3116.
[6]李大新.基于机器视觉的车道线检测识别与车道偏离预警算法研究[D].山东大学,2012.
[7]李大新.基于机器视觉的车道线检测识别与车道偏离预警算法研究[D].山东大学,2012.
猜你喜欢
兵器装备工程学报(2022年8期)2022-09-13
上海师范大学学报·自然科学版(2022年3期)2022-07-11
北京航空航天大学学报(2022年6期)2022-07-02
云南大学学报(自然科学版)(2022年1期)2022-02-21
集装箱化(2021年1期)2021-04-12
校园英语·上旬(2020年1期)2020-05-09
华东师范大学学报(自然科学版)(2020年1期)2020-03-16
中国信息技术教育(2020年2期)2020-02-02
上海师范大学学报·自然科学版(2018年3期)2018-05-14
卷宗(2017年16期)2017-08-30
