
利用QAR和DEM的机载气象雷达地杂波仿真方法
2017-09-07 09:50张金玉卢晓光钟元昌
数据采集与处理 2017年4期
张金玉 秦 娟 卢晓光 钟元昌
(1.天津理工大学电气电子工程学院薄膜电子与通信器件重点实验室,天津,300384; 2.中国民航大学智能信号与图像处理天津市重点实验室,天津,300300)
利用QAR和DEM的机载气象雷达地杂波仿真方法
张金玉1秦 娟1卢晓光2钟元昌1
(1.天津理工大学电气电子工程学院薄膜电子与通信器件重点实验室,天津,300384; 2.中国民航大学智能信号与图像处理天津市重点实验室,天津,300300)
地杂波是降低机载气象雷达性能的一个关键因素。利用数字高程模型(Digital elevation model,DEM)精确计算不同地形的电磁散射时,本文提出了将经纬度变化量转换成距离变化量的方法,简化计算,并修正了俯角和擦地角计算。然后根据气象雷达方程建模地杂波,按照WXR-2100的实际参数设置雷达参数,结合快速存取记录器(Quick access recorder,QAR)反演的航班飞行参数,分别高保真地仿真了起飞和巡航两个阶段机载气象雷达不同工作模式下的杂波图,反映了实际的运行情况,最后建立了杂波图数据库。
机载气象雷达;地杂波仿真;数字高程模型;快速存取记录器;坐标转换
引 言
杂波是雷达波束覆盖内的物体表面形成的不需要的电磁散射。杂波回波的功率取决于许多因素,包括极化、工作频率、俯角和表面特性,如粗糙度等,因此杂波随时间和地点变化。许多目标检测算法依赖于杂波的统计模型来设置检测阈值,并且杂波抑制算法需要杂波协方差的估计,经常通过计算在相邻距离单元的回波信号的统计特性获得。然而,如果目标后向散射影响到邻近的距离单元,协方差的估计可能被破坏。利用位点特异性杂波图,不仅可以提高目标检测,也可优化雷达传感器的部署、任务布置或规划飞行路线,最重要的是能够给雷达信号处理器提供位点特异的及时的杂波信息。利用光、多光谱、高光谱和激光雷达数据遥感数据,模拟雷达杂波,提高了机载雷达杂波的位点特异性信息。1988年Garside和Oliver的工作表明自然杂波的光学图像和雷达图像具有一致伽玛分布的噪声模型[1]。2011年,Kurek等用多光谱陆地卫星7和ETM图像,结合数字高程模型(Digital elevation models,DEM)数据,补偿俯角仿真了X波段雷达陆基雷达的杂波图[2],然而不能从陆地卫星图像中自动区分道路和城市地区。2014年Seyfioglu和 Gurbuz研究了利用高光谱和激光雷达的地杂波仿真模拟,适用于低空飞行的机载雷达[3]。目前为止,有大量的工作使用DEM结合电磁散射的不同类型进行仿真模拟雷达杂波[4-14]。文献[9,10]只使用DEM数据计算杂波雷达散射截面,仿真仅仅利用了典型地形。
机载气象雷达和一般机载多普勒雷达工作原理一样,但是飞机在不同飞行阶段时雷达工作于不同模式。尤其巡航阶段的气象模式,雷达设置较低的脉冲重复频率和较宽的脉冲[15],相干脉冲数少,不易得到杂波统计特性。DEM是地面的高程Z关于平面坐标X,Y两个自变量的连续函数,就是用数字表达地形表面形态属性信息的方式,数字地形模型是对该区域的空间位置特征和地形属性特征的数字描述。在DEM上计算雷达后向散射系数,需要复杂的地心坐标系转换,本文提出了经纬度变化量转换成距离变化量的方法,从而减少计算量。快速存取记录器(Quick access recorder,QAR)是飞行状态监控系统的存储设备之一,记录了整个飞行过程中成百上千种重要参数[16],利用其包含的飞行参数(飞机经纬度、高度、航向、飞机姿态、飞行速度和地速等)可以反演载机飞行中的系统环境和飞行参数。
本文通过建立本地直角坐标系,替换了传统了地心坐标转换,推导了在DEM上地物到机载雷达的斜距和方位的简单公式,修正俯角和方位角计算,可以快速地在DEM计算不同地形的电磁散射,将仿真数据和实测数据进行了比较分析。结合QAR建模机载气象雷达完整飞行过程的地杂波,在多核高性能计算机上离线高保真地仿真大量地杂波图,分别仿真了起飞和巡航两个阶段机载气象雷达不同工作模式下的杂波图,仿真结果能够反映实际的运行情况,建立了杂波图数据库。
1 利用DEM仿真地杂波
为了获取更加真实的地杂波图,把雷达原理、电磁波散射模型和数字化高程数据、计算机技术相结合,研究真实场景的半实物化的雷达地杂波方法并进行仿真分析。
1.1 坐标转换
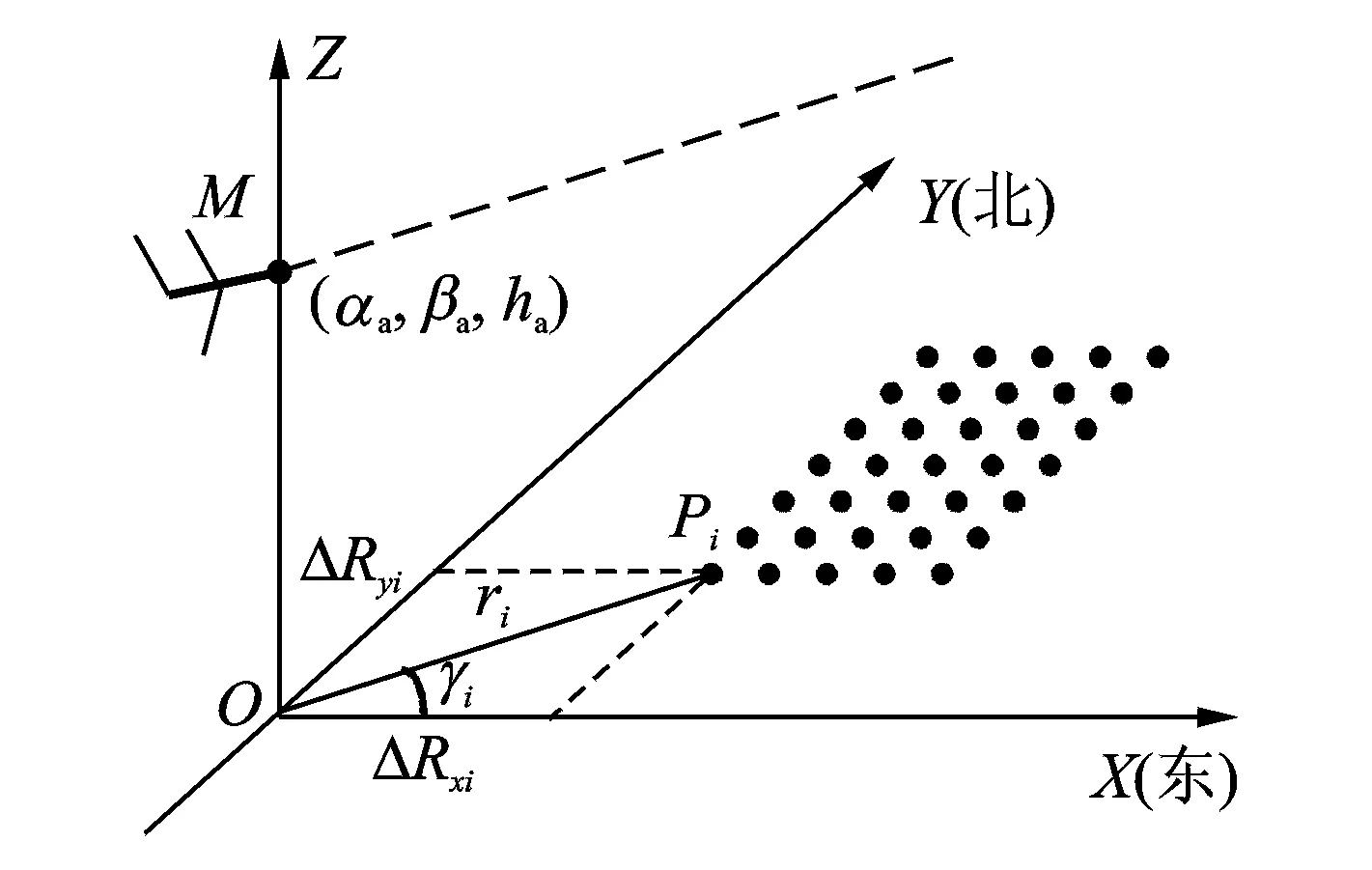
图1 本地直角坐标系Fig.1 Local Cartesian coordinate system
一般杂波散射系数图采用雷达坐标系来表示,而DEM数据则采用地理坐标系表示。为了便于对大量的数据进行快速计算与处理,必须将机载雷达位置和地形地物点的坐标实时地转换到统一的坐标系中。本文采用本地直角坐标系作为中间转换坐标系。建立如图1所示的本地直角坐标系,坐标的原点为飞机到地面的投影位置。由机载电子设备得到飞机的位置信息经度、纬度和高度(αa,βa,ha),地面点Pi(i=1,2,3,…,N)的经度、纬度和高度信息为(αi,βi,Hi),Pi到原点的经度变化量Δαi和纬度变化量Δβi就是该点在X轴和Y轴的投影。
在雷达作用距离远远小于地球半径时,可以忽略地球曲率的影响,将地球表面看做平面[17],可以计算距离变化量为
(1)
式中:Re1,Re2分别为地球的赤道半径和极半径。进一步参量转化,计算出Pi在本地直角坐标系中的极角γi和距离ri为
(2)
由ri可以计算得到雷达斜距,根据γi选择雷达波束的扫描范围非常方便。本文所提出的本地直角坐标中间变换方法,大大减小了计算量,计算速度显著提高。由于地形本身的起伏及自然或人造地物的存在,使地面单元可能被其他单元甚至也有可能是自身遮挡,这种遮蔽效应在天线波束以较低擦地角照射时会更加明显,因此在作地杂波仿真前需进行遮挡计算和消隐[9]。
1.2 俯角计算
在不考虑地形高度的情况下,第i个散射点到载机的俯角φdi和擦地角φgi计算式为
(3)
式中:雷达电波传播过程中,必然受到大气折射的影响,在进行路径计算时,通常选用地球等效半径Re(标准大气中约8 500 km);ha为飞机当前高度;Ri为地面第i点到雷达的径向距离。同时,根据DEM中得到的散射点的高程Hi,将式(3)进一步修正为
(4)
由擦地角φgi,利用Morchin模型计算不同地点的散射特性。
1.3 机载气象雷达地杂波回波
在雷达波束覆盖范围内,地杂波呈分布式,一个分辨率单元内分布着大量的散射点。雷达回波就是各散射点回波信号的矢量叠加。因此,根据相干视频信号模型仿真地杂波回波,即有
(5)

(6)
式中:δ表示载机姿态任意时的俯冲角;θi表示第i点到雷达的方位角;φi表示第i点到雷达的俯仰角,且以水平轴向下的夹角为正角度。
根据机载气象雷达的工作模式和作用距离,不需要考虑模糊距离。图2给出了地杂波的仿真流程。
2 QAR数据
选取的QAR数据来源于从深圳宝安国际机场到北京首都国际机场的一架航班,从中可以提取相应的飞行参数。按照飞行过程中记录的载机参数设置平台参数,包括飞机地理位置、飞机速度、高度、航向和俯冲角等。图3为航班的飞行路径,图中叠加了地形数据。在图2中仿真流程中飞机参数由QAR反演得到,雷达参数按照WXR-2100[15]的实际参数选取,然后根据雷达扫描过程,叠加各散射点的回波信号生成气象目标的雷达回波。
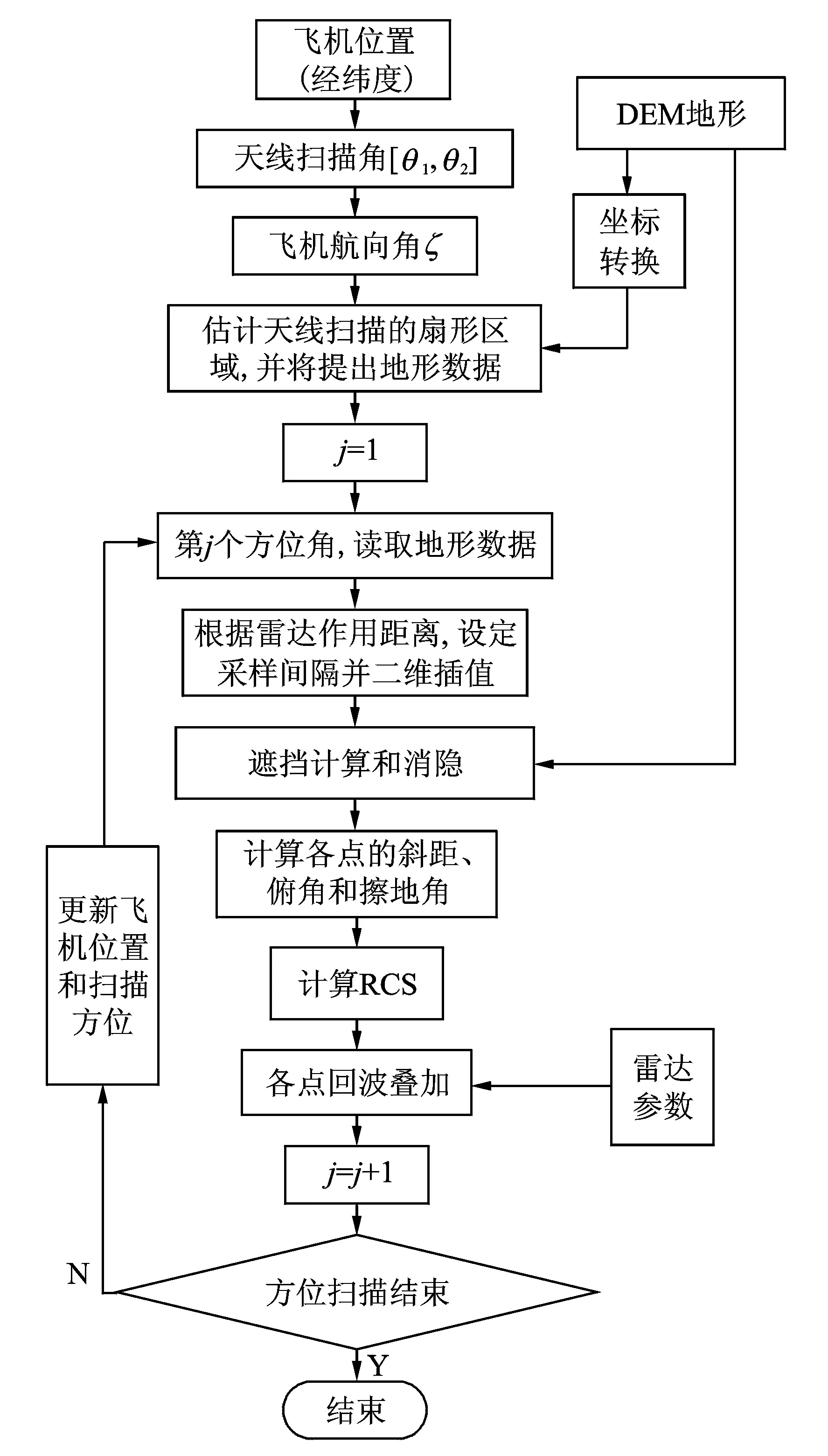
图2 地杂波仿真流程图Fig.2 Flowchart of ground clutter simulation
3 仿真结果
3.1 仿真与实测数据对比
模型号机载气象雷达,在图4所示区域晴空条件下试飞,采集地杂波,某一扫描周期回波数据如图5所示。采用和试飞情况相同的参数设置,在同一区域用本文方法仿真地杂波回波,结果如图6。
仿真过程中采用了如图7所示的窄笔形波束天线,半功率波束宽度和主瓣增益与机载气象雷达的天线参数要求,但是第一零点波束宽度比实际天线大,使得仿真结果中地杂波带较实测数据充实;而实际的波导裂缝天线旁瓣电平达不到技术指标,仿真结果的旁瓣数据强度较实际数据低,对于天线增益的仿真可以考虑采用三维电磁仿真软件HFSS提高逼真性。同时,由于系统误差的存在,使得仿真结果和实际测量数据有差异。通过比较,地杂波带所在距离位置都大约为15~25 km的范围,该结果验证了本文方法的正确性和有效性。
本仿真采用双CPU(Intel Xeon E5 2658 v2)20核高性能计算机,配置了多个计算节点,该计算机的峰值计算速度可达到384gflops(十亿次/秒浮点运算)。试飞实测数据需花费巨大的人力、物力和财力,因此,采用本方法离线仿真机载气象雷达不同工作模式下不同参数的地杂波回波数据,可以为进行地杂波抑制建立丰富的地杂波数据库。
3.2 基于QAR建立地杂波图数据库
图8为飞机起飞阶段的DEM。机载气象雷达工作于风切变模式,飞机高度约1 600 m,飞行速度约125 m/s,雷达作用距离60 km,图9为俯仰角2.5°和4.5°时的地杂波强度,为明确反应风切变工作模式的扫描范围[-30°,30°],采用平面位置显示器(Plane position indicator, PPI)显示。
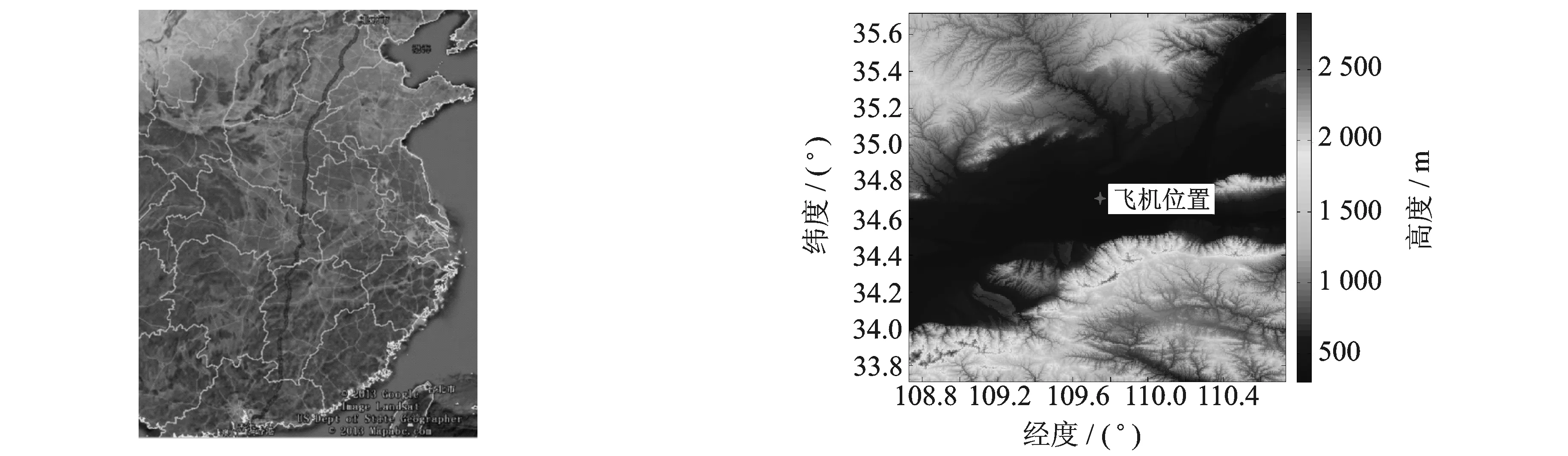
图3 深圳-北京的某航班飞行路径 图4 以(E109.728 9°,N34.716 0°)为中心的DEM Fig.3 Flight path from Shenzhen to Beijing Fig.4 DEM centered at (E109.728 9°,N34.716 0°)

图7 笔形波束天线的水平剖面增益 图8 飞机起飞阶段的地形Fig.7 Pencil beam antenna gain in horizontal profile Fig.8 Terrain at take-off stage

图9 风切变模式下地杂波幅度Fig.9 Clutter simulation at wind shear mode
图8所示地形较平坦,因此仿真的杂波回波的幅度基本相近,极少的距离单元因地形起伏回波的幅度存在差别。比较图9(a)和图9(b),还可以看出,俯仰角小时杂波带范围较大,这是因为此时雷达波束与地面截交的范围较大引起的,这也证明了调整俯仰角抑制杂波的可行性。图10还给出了俯仰角2.5°时两个方位不同距离单元回波的频谱图,可以看出图10(b)的主瓣杂波频谱明显比图10(a)宽,这是波束扫描造成的频谱展宽效应,雷达正前方的回波频谱宽度比雷达两侧的回波频谱宽度窄。从回波频谱特性验证了仿真过程的正确性。
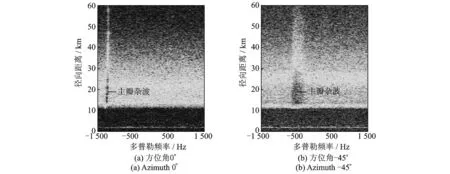
图10 不同方位回波的频谱Fig.10 Echo spectrum in different directions
图11为飞机巡航阶段的DEM,雷达工作于气象模式,发射的电磁波由1个宽脉冲和4个窄脉冲组成,飞机高度约10 000 m,飞行速度约240 m/s,雷达作用距离80 km,扫描范围[-60°,60°]。仿真时,设置俯仰角为10.25°进行实验。图12给出了载机巡航阶段气象模式下仿真的窄波束的杂波幅度的PPI显示,地杂波位于47~68 km的范围,反应了雷达照射地面的范围和地面的起伏程度;气象模式下宽波束的杂波回波也有同样特点,不再重复放置仿真结果。
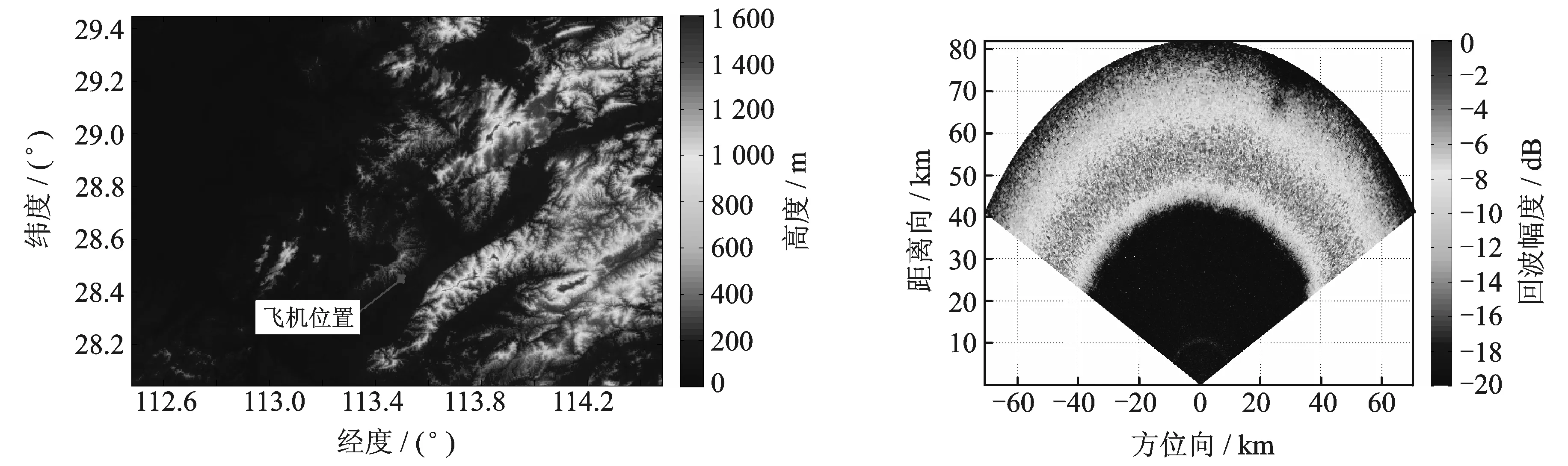
图11 飞机巡航阶段的地形图 图12 10.25°俯仰角的杂波幅度 Fig.11 Terrain during cruise phase Fig.12 Clutter amplitude at pitch angle 10.25°
4 结束语
为了获得高保真的机载气象雷达地杂波回波信号,本文提出了利用DEM和QAR的地杂波回波数据生成方法。通过DEM计算不同地形的电磁散射,详细推导了地物到载机的径向距离和方位角的计算公式,考虑了DEM的俯角计算公式,阐述了基于雷达实际扫描过程的地杂波原始数据的生成方法和流程。本文提出了利用经纬度变化量转换成距离变化量的方法,并对雷达波束照射地面的俯角和擦地角计算进行了更精确的修正。给出了仿真结果和实测数据的比较,考虑存在系统误差和天线误差,回波信号的强度有差异,但地杂波带的位置一致,验证了本方法的正确性和有效性。改进X波段的波导裂缝天线增益的仿真,将会提高高保真仿真的效果。本文在利用DEM的计算雷达散射系数的基础上,按照WXR-2100的实际参数设置雷达参数,结合QAR反演的飞行参数,建模并仿真机载气象雷达完整飞行过程的地杂波,能更加反映真实的情况。从航班获得大量QAR数据,在多核高性能计算机上离线仿真海量地杂波数据,给出了某航班起飞阶段风切变模式下不同俯角和方位角的回波数据,和巡航阶段气象模式模式下的杂波图,能够反映实际的运行情况,可以建立海量的杂波图数据库,为雷达系统仿真和信号处理提供更真实的杂波数据。
[1] Garside J R, Oliver C J. A comparison of clutter texture properties in optical and SAR images[C]// Geoscience and Remote Sensing Symposium, Remote Sensing: Moving Toward the 21st Century. Edinburgh, UK:IEEE,1988:1249-1255.
[2] Kurekin A, Radford D, Lever K, et al. New method for generating site-specific clutter map for land-based radar by using multimodal remote-sensing images and digital terrain data[J]. IET Radar Sonar Navigation, 2011,5(3):374-388.
[3] Seyfioglu M S, Gurbuz S Z. Airborne radar clutter simulation using hyperspectral and LiDAR imagery[C]// Geoscience and Remote Sensing Symposium (IGARSS). Quebec City:IEEE,2014:2938-2941.
[4] Billingsley J B, Larrabee J F. Multifrequency measurements of radar ground clutter at 42 sites. Volume 1: Principal results[R]. MIT Lincoln Laboratory Technical Report 916, 1991,1(1)1-61.
[5] Darrah C A, Luke D W. Site-specific clutter modeling using DMA digital terrain elevation data (DTED), digital feature analysis data (DFAD), and Lincoln Laboratory five frequency clutter amplitude data[C]// Radar Conference Proceedings of the IEEE National. Ann Arbor, MI:IEEE, 1996:178-183.
[6] Cobo B, Valle L, Torres R P. A site-specific radar simulator for clutter modelling in VTS systems[C]// ELMAR, 50th International Symposium. Zadar: IEEE, 2008:373-376.
[7] Jylha J, Kerminen R, Vihonen J, et al. New aspects to knowledge-aided clutter analysis[C]// Radar, 2006 IEEE Conference on. Verona, N Y:IEEE, 2006:318-324.
[8] Li Jianjun, Yu Lijuan, Liu X. Simulation of desert scene for land clutter radar cross section[J]. Electronic Science & Technology, 2013,26(2):19-23.
[9] Wang A, Zhang W, Cao J. Terrain clutter modeling for airborne radar system using digital elevation model[C]// Microwave and Millimeter Wave Circuits and System Technology (MMWCST). Chengdu: IEEE, 2012:1-4.
[10]Li S. Simulation of the radar ground clutter based on DEM[J]. International Journal of Computer Science Issues, 2013,10(3):97-102.
[11]Lin C C, Reilly J P. A site-specific model of radar terrain backscatter and shadowing[J]. Johns Hopkins Apl Technical Digest, 1997,18(3):432-447.
[12]吴仁彪,卢晓光,李海,等.机载前视风切变检测气象雷达的研究进展[J].数据采集与处理,2014,29(4):496-507.
Wu Renbiao, Lu Xiaoguang, Li Hai, et al. Overview on airborne forward-looking weather radar with windsheer detection capability[J]. Journal of Data Acquisition and Processing, 2014,29(4):496-507.
[13]Kurekin A, Shark L K, Lever K, et al. Site-specific land clutter modeling based on radar remote sensing images and digital terrain data[C]//Image and Signal Processing for Remote Sensing XVI. Toulouse, France:IEEE, 2010:25-36.
[14]何力,李勇,刘丽.机载气象雷达充塞系数估计方法[J].数据采集与处理,2014,29(4):642-647.
He Li, Li Yong, Liu Li. Beam filling coefficient estimation method for airborne weather radar[J]. Journal of Data Acquisition and Processing, 2014,29(4):642-647.
[15]Rockwell Collins. WXR-2100 Manual Book[M]. Cedar Rapids, Iowa: Rockwell Collins Inc., 2011.
[16]Wang Qing, Wu Kaiyuan, Zhang Tianjiao, et al. Aerodynamic modeling and parameter estimation from QAR data of an airplane approaching a high-altitude airport[J]. Chinese Journal of Aeronautics, 2012, 25(3):361-371.
[17]Lefurjah G, Marshall R, Casey T S, et al. Synthesis of mesoscale numerical weather prediction and empirical site-specific radar clutter models[J]. IET Radar Sonar Navigation, 2010,4(6):747-754.
Airborne Weather Radar Clutter Simulation Using DEM and QAR
Zhang Jinyu1, Qin Juan1, Lu Xiaoguang2, Zhong Yuanchang1
(1.Key Laboratory of Film Electronics and Communication Devices, School of Electrical and Electronic Engineering, Tianjin University of Technology, Tianjin, 300384, China; 2.Tianjin Key Laboratory for Advanced Signal Processing, Civil Aviation University of China, Tianjin, 300300, China)
A key factor degrading the performance of airborne weather radar is clutter. Here, the change amount of latitude and longitude is converted into the distance variation to compute electromagnetic scattering of different terrain using a digital elevation model (DEM). The calculation of depression and grazing angle is fixed. According to the meteorological radar equation, the ground clutter is modeled. Radar parameters are set in accordance with the actual parameters of WXR-2100, while flight parameters by the quick access recorder (QAR). The clutter maps for airborne weather radar in the different operating modes are simulated during take-off and cruise stages. The results can reflect actual operating conditions. Finally, the clutter map database is established.
airborne weather radar; clutter simulation; digital elevation model (DEM); quick access recorder (QAR); coordinate conversion
国家自然科学基金(61471365,61505144)资助项目;天津理工大学大学生创新创业训练计划(201410060046)资助项目。
2015-06-06;
2016-04-06
TN959.4
A

张金玉(1993-),女,助理工程师,研究方向:机载气象雷达回波信号建模,E-mail:1912652425@qq.com。

秦娟(1979-),女,博士,讲师,研究方向:机载气象雷达信号处理、地杂波仿真和抑制。

卢晓光(1983-),男,博士,讲师,研究方向:机载气象雷达信号处理、SAR图像处理。
钟元昌(1995-),男,本科生,研究方向:地理信息数据采集。
猜你喜欢
作文周刊·小学一年级版(2022年24期)2022-06-18
科学与信息化(2021年30期)2021-12-24
内蒙古气象(2021年2期)2021-07-01
电子制作(2019年15期)2019-08-27
小学生学习指导(低年级)(2018年12期)2018-12-29
领导决策信息(2018年46期)2018-04-20
百科探秘·航空航天(2017年11期)2017-12-20
火控雷达技术(2016年3期)2016-02-06
西北工业大学学报(2015年3期)2015-12-14
百科探秘·航空航天(2015年4期)2015-11-07
