风力发电机组齿轮箱振动测试及分析
2017-12-20 06:23张新荣刘成浩马王禹泽
东北水利水电 2017年12期
程 振,张新荣,刘成浩,马王禹泽
风力发电机组齿轮箱振动测试及分析
程 振,张新荣,刘成浩,马王禹泽
(中水东北勘测设计研究有限责任公司,吉林长春130021)
文章分析了风力发电机组齿轮箱的振动特性,在此基础上提出了风力发电机组的振动测试方法,并以国内某风电场2台风电机组的实测振动数据为依据,分析了引起机组振动的原因,总结了风力发电机组振动故障的频谱特征。
风力发电机组;振动特性;振动检测
1 概况
对各国风电机组发生的故障统计结果表明,风电机组的易损部件主要包括传动系统(齿轮箱、主轴)、叶片、发电机等,而风力发电机组各种故障中,大部分故障的产生与机组主要结构的振动有关,其中风力发电机组的齿轮箱部分是机舱振动的主要来源。因此,风力发电机组齿轮箱振动特性及振动检测研究对提高风电机组可靠性十分重要。
某风电场位于湖北省通山县内,装有16台G58-850型西班牙进口风电机组。风场投产运行2年以来,风机日常维护工作十分频繁,尤其在机舱内部的齿轮箱、主轴承等设备发生各种故障频率较高,维护工作困难。为此,下文以某风电场F-10机组、F-16机组齿轮箱振动特性及振动检测为研究对象,分析总结风力发电机组齿轮箱的故障特点。
2 特性分析
齿轮箱振动的2个基本频率就是轴旋转频率和齿轮啮合频率。啮合频率是任意相互啮合的2个齿轮转过1个齿距角时间的倒数,可由式(1)确定。

式中:n为主轴转速即风轮转速,rpm;z为齿数。
G58-850型风电机组齿轮箱采用1级行星/2级平行轴传动结构,如图1所示。
2.1 第一级行星轮传动
第一级为行星轮系,行星架为输入端,内齿圈是固定的,太阳轮是输出端。主要参数有:太阳轮齿数z2,行星轮齿数z3,内齿圈齿数z4。
设第一级行星轮系传动比为I1,内齿圈转速n4=0,太阳轮转速n2=I1·n,行星轮公转速度n3=n,则太阳轮、行星轮及内齿圈的啮合频率均为:

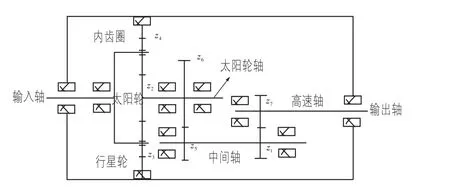
图1 G58-850风力发电机组齿轮箱结构图
行星架所在轴转频:

太阳轮轴转频:

2.2 第二级中间级定轴传动
第二级为中间级,主要参数有大齿轮数齿数z6,小齿轮齿数z5。
设第二级中间级传动比为I2,大齿轮转速为太阳轮转速n6=n2=I2·n,小齿轮转速n5=I2·n6,则中间级啮合频率均为:

中间轴转动频率为:

2.3 第三级高速级定轴传动
第三级为高速级,主要参数有大齿轮数齿数z1,小齿轮齿数z7。
设第三级高速级传动比为I3,大齿轮转速为中间轴转速n1=n5,小齿轮转速n7=I3·n1,高速级啮合频率均为:

高速轴转动频率为:

3 测点方案
风力发电机组振动信号是设备出现异常时信息的重要载体,合理布置测点是决定能否检测到准确振动信号的必要条件,而选择最佳的测点是决定能否客观的获取设备故障信息的关键。因此,振动测试点的选择尤为重要。测点布置方案如表1所示。
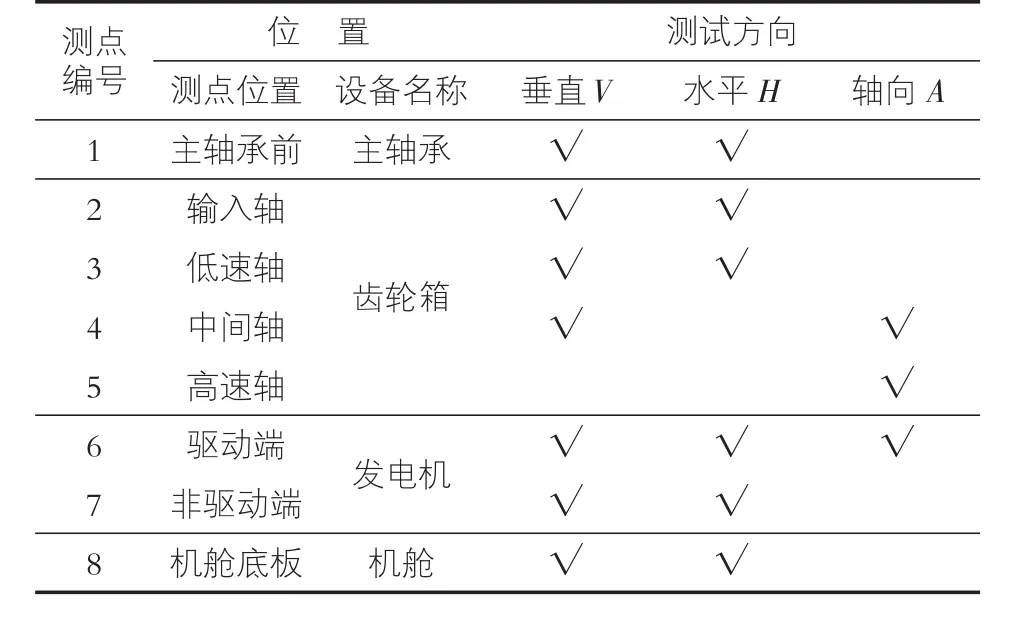
表1 测点布置
4 振动信号分析
4.1 风电机组齿轮箱振动特征频率
F-10机组在检测时实测平均风速为5.0 m/s,平均风轮转速为12.5 rpm,F-16机组在检测时实测平均风速为12 m/s,平均风轮转速为22.5 rpm,将风电机组齿轮箱的基本参数带入到公式(2)~(7)中,得到齿轮箱的特征频率如表2所示。
4.2 F-10风电机组齿轮箱振动信号时频域分析
对风电机组齿轮箱的输入轴、低速轴、中间轴及高速轴进行振动检测,观察实测数据发现,在同一台机组的不同测点处,测得振动信号包含的机组故障信息基本相同。由于篇幅有限,这里仅列出F-10机组中间轴垂直测点及F-16机组输入轴水平测点的时频域分析结果。
F-10机组齿轮箱中间轴振动时域波采集的加速度信号前10 s出现异常,与后面50 s的振动波形相差很大,可能是电磁干扰的影响。因此,剔除前10 s的数据,做进一步分析。F-10机组中间轴垂直振动信号0~2 000 Hz范围内的速度谱出现峰值,如表3所示。
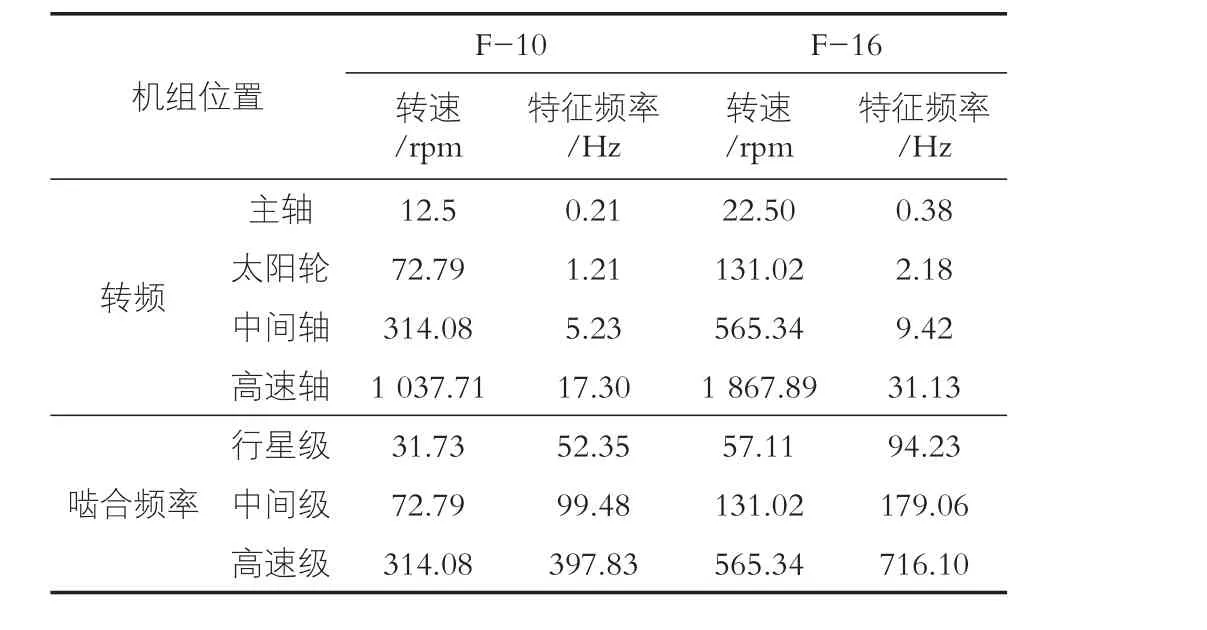
表2 齿轮箱振动特征频率

表3 F-10机组中间轴垂直振动0—2 000 Hz范围速度谱峰值表
在表3中可明显观察到以中间级啮合频率99.48 Hz及其4倍频为中心频率的载波,其余频率段振动幅值较为平稳,在载波中心周围没有发现有规律间隔的边带成分,进一步细化解调得到加速度包络谱。F-10机组中间轴垂直振动信号低频区域内振动成分比较丰富,没有明显的峰值突出,且没有明显间隔的边带频率成分,在齿轮箱特征频率处也没有发现明显峰值存在。这说明F-10号机组齿轮箱中间级在啮合过程中产生的低噪较高,这与其润滑不良有关。
4.3 F-16风电机组齿轮箱振动信号时频域分析
F-16机组齿轮箱输入轴振动信号0~1 000 Hz,1 000~2 000 Hz范围的速度频谱出现峰值,如表4所示。
在表4中发现齿轮箱中间级啮合频率179.06 Hz及其倍频载波频率。高速级啮合频率的二倍频1 432.20 Hz周围存在对称分布、数量多、分布宽的调制边频带,频率间隔约为30 Hz。经过进一步解调分析齿轮箱输入轴水平加速度细化包络谱,加速度谱出现峰值,如表5所示。

表4 F-16机组输入轴水平振动0~1000 Hz范围速度谱峰值表
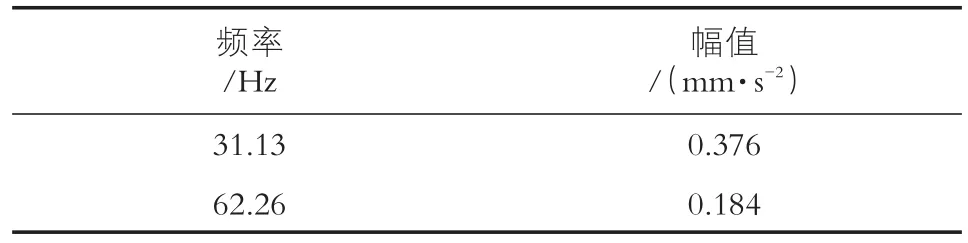
表5 F-16机组齿轮箱输入轴水平加速度细化包络谱峰值表
在表5中,可以清楚地分辨出调制信号的频率为31.13 Hz,即高速轴转频,而且前2阶谐频幅值增加较为明显。输入轴水平测点检测出的频谱特征为:以中间级啮合频率及其谐波、高速级啮合频率为载波频率,高速轴转频及其2倍频为调制频率的调制现象。信号频谱中边带的成分主要由于高速轴的转频产生调制,表明在高速轴上可能存在故障。
依据F-16号机组齿轮箱输入轴振动信号频谱特征,齿轮箱故障可能为:高速轴上齿轮出现均匀磨损、断齿、齿形误差或高速轴不平衡4种故障。当齿轮均匀磨损时,一般不会形成轮齿的齿形局部大的变化,所以一般没有冲击振动信号产生,不会出现明显的调制现象,只会有齿轮啮合频率及其各阶谐波处的幅度明显增大,这与F-16机组出现明显的高速轴转频调制现象相反,可以排除。齿轮箱的断齿故障,是一种严重失效形式,轴系在转动时,断齿处得轮齿参与啮合的时候会产生很大的冲击振动,在时域波形上表现为幅值很大的冲击型振动,冲击频率等于断齿所在轴的转频。由于冲击能量很大,其边频带的数目很多,分布也很宽,谐波阶数很高,这与F-16机组调制边带数目少而稀,调制频率仅前2阶较为明显相违背,也可以排除。F-16号机组的故障特征基本符合较为严重的齿形误差或轴不平衡故障的频谱特征。轴不平衡故障的本质是导致齿形误差,当出现齿形误差的齿进入啮合,产生的冲击能量较小,会产生齿轮啮合频率及其高次谐波为载波,故障轴的转频为调制频率的调制现象,调制频率的边频带少。
对照G58-850风电机组齿轮箱的结构图可知,中间级的输出齿轮z5和高速级的输入齿轮z1之间通过中间轴连接,而高速轴连接在高速级的输出齿轮z7上。由此可以推断,F-16号机组的故障类型为齿轮箱高速轴上的z7齿轮存在齿形误差,或是高速轴不平衡故障。
5 总结
1)风力发电机组传动系统比地面齿轮箱结构更复杂,振动信号中包含频率成份更多,其信号特点如下:周期成分主要是齿轮箱各级轴的转频、啮合频率及其谐波成分,其中,中间级和高速级啮合频率成分最突出。
2)从分析过程看,风电机组振动信号的解调分析对确定机组故障原因十分有效。
3)从分析结果看,测试2台机组振动幅值处于同一数量级,这表明仅仅通过振幅的变化不能完全说明风力发电机组传动系统是否出现故障。2台机组振动信号中均存在边带成分,因此仅凭振动信号中是否存在边带成分不能诊断为齿轮箱故障,还有可能是润滑不良。
[1]郭新生.风能利用技术[M].北京:化学工业出版社,2007.
[2]丁康,李巍华,朱小勇.齿轮及齿轮箱故障诊断实用技术[M].北京:机械工业出版社,2005.
[3]薛扬,秦世耀.重视开发风电机组检测技术[J].中国科技投资,2008(4).
[4]邝朴生,徐福章,刘玉琴.现代机器故障诊断学[M].北京:农业业出版社,1991.
[5]R.A.柯拉科特.机械故障的诊断与情况监测[M].北京:机械工业出版社,1983.
[6]樊永生.机械设备诊断的现代信号处理方法[M].北京:国防工业出版社,2009.
[7]张新荣.风力发电机组主要结构振动特性及检测技术研究[D].武汉:武汉大学,2011.
TM614 < class="emphasis_bold"> [文献标识码]B
B
1002—0624(2017)12—0061—03
2017-05-31
猜你喜欢
山东冶金(2022年4期)2022-09-14
山东冶金(2022年3期)2022-07-19
防爆电机(2022年1期)2022-02-16
制造技术与机床(2017年4期)2017-06-22
山东工业技术(2016年15期)2016-12-01
通信电源技术(2016年4期)2016-04-04
风能(2016年12期)2016-02-25
新疆钢铁(2015年3期)2015-02-20
振动、测试与诊断(2014年4期)2014-03-01
中国设备工程(2014年1期)2014-02-28