
纯电动汽车再生制动控制策略研究
2018-01-19 11:22郭志军岳东东聂彦鑫雷宇凝
机械设计与制造 2018年1期
郭志军,岳东东,聂彦鑫,雷宇凝
(1.河南科技大学 车辆与交通工程学院,河南 洛阳 471003;2.中国汽车技术研究中心,天津 300300;3.北京新东方扬州外国语学院 国际中学,江苏 扬州 225006)
1 引言
制动能量回收是电动汽车节能降耗的重要方式之一。当制动时,电动机被控作为发电机运行在第四象限内,将整车的部分动能转化为电能,最终储存在动力电池组或超级电容中,从而有效的提高整车的能量利用效率[1-2]。由于制动安全性、可靠性、驾驶舒适性以及电机电池特性等都限制着再生制动力的大小,因此整车制动离不开传统的机械制动。为了在确保制动安全性和舒适性的前提下,实现最大化回收制动能量,必须制定合理的控制策略,以解决前后轮制动力分配问题,协调好驱动轮上再生制动和机械制动之间的关系[3-4]。针对某款前驱纯电动汽车,通过对制动力安全分配区域的分析,提出一种基于ECE法规和模糊控制的再生制动控制策略,并针对控制策略建立了simulink模型,最后嵌入AVL-CRUISE整车模型进行了仿真分析。
2 制动力分配系统
2.1 安全制动力区域
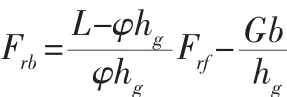
汽车在制动过程中,前、后车轮同时抱死时前、后轮制动力的关系曲线—理想的前、后轮制动力分配曲线,简称I曲线[5],如图1所示,其曲线方程:

式中:G—汽车重力;hg—质心高度;b—质心至后轴的距离;L—汽车轴距;Ffb、Frb—前、后轮制动力。
图1中f线为某一附着条件下前轮抱死的曲线,其曲线方程:
式中:φ—路面附着系数(这里取0.7)。
M线是由依据ECE法规制定的,它限制了制动时后轮最小的制动力,其曲线方程:

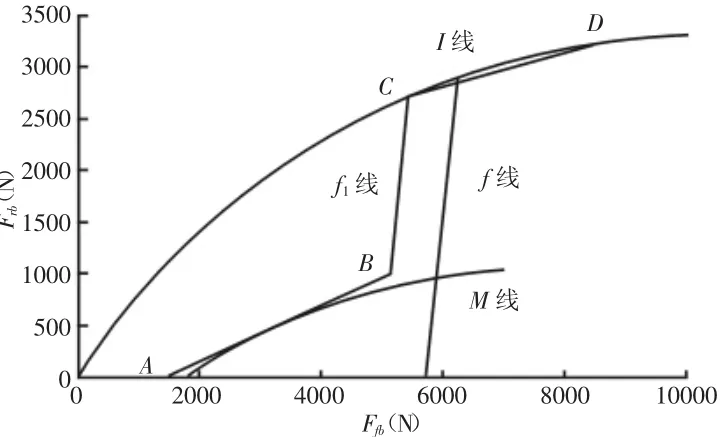
图1 制动力分配区域Fig.1 The Distribution Area of Braking Force
由I线、f线、M线和横坐标轴共同围成的范围称为安全区域[6],前后轮制动力分配不能超过此区域。
2.2 前、后制动力分配
为了提高制动能量回收率,在制动力分配的安全区域内应尽量增大前轮制动力分配比例,前、后制动力分配应按M线进行分配。为了简化和减少计算量,用其切线AB来代替,由于M线是二元二次方程,首先对M线在[1500,5152]进行拟合,并求得了在此范围内切线与横坐标轴围成三角形面积最小的切线方程[7]:

(1)当制动强度z≤0.1121时,0.1121是A点对应的制动强度,为了尽可能的增大再生制动力,所需制动力完全由前轮提供,后轮制动力为 0,即:Ffb=Gz;Ffb=0
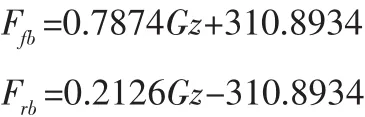
(2)随着制动强度增加,前后制动力应沿AB线分配,B点对应的制动强度为0.4712,即前轮所能提供的最大再生制动力对应的制动强度,当0.1121<z≤0.4712 时:
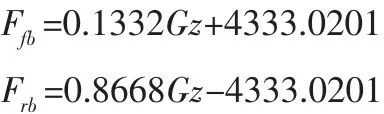
(3)为提高制动的稳定性,B点以后的制动力分配曲线应按照B点对应的f1线进行分配,因为前轮再生制动力受电机力学特性限制不能继续增大[8],C点为f1线与I线的交点,其对应的制动强度为 0.6227,当 0.4712<z≤0.6227 时:
(4)当0.6227<z≤0.9时,前后制动力按CD线分配,D点为制动强度0.9对应的I线一点。则:
3 再生制动模糊控制策略
模糊控制主要根据工程经验制定模糊规则,在模仿人的推理和行为决策方面无疑是最成功的技术之一,它不依赖于精确的数学模型,易于对不确定系统或非线性系统进行控制,对于带有不确定性的行驶工况具有较强的鲁棒性和抗干扰能力[9-10]。
3.1 控制策略的原理
所设计的基于ECE制动法规和模糊控制的再生制动控制策略原理,如图2所示。基于ECE法规的制动力分配模块根据整车参数和制动强度z进行前、后轮制动力分配,求出Ffb和Frb,其中Frb全部进行机械制动。模糊控制器根据当前的制动强度、车速以及动力电池的SOC计算出电机制动力矩比例k,基于当前车速下电机最大扭矩得到Ff,接着与Ffb取小运算得到前轮再生制动力Fre和前轮机械制动力Fff。为了保证制动安全性,当制动强度z≥0.7时,退出再生制动,全部进行机械制动,可见实现控制策略的关键在于模糊控制器的设计。
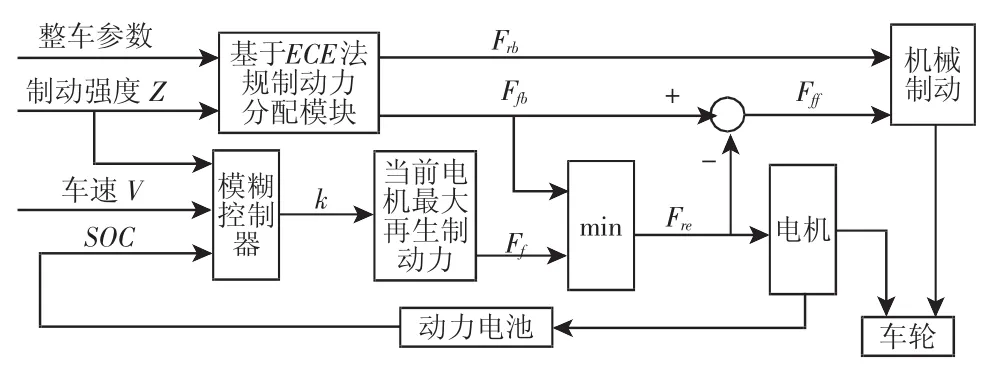
图2 控制策略原理图Fig.2 The Principle Diagram of the Control Strategy
3.2 模糊控制器的设计
选取影响纯电动汽车制动能量回收的3个主要因素制动强度z、动力电池SOC、车速V作为模糊控制器的输入变量,选取电机制动力矩比例k作为模糊控制器的输出变量,并分别规定下列模糊子集:E(z)={L,M,H},E(SOC)={L,M,H},E(V)={L,M,H},E(k)={VS,S,M,B,VB},其中模糊子集 L、M、H 分别代表低、中、高,VS、S、M、B、VB分别代表极小、小、中、大、极大。根据大量的实验数据和理论分析,分别设计了输入、输出变量的隶属函数,如图3所示。

图3 隶属函数Fig.3 The Membership Function
在制定能量回收模糊规则时,应尽量在保证整车制动安全性和舒适性前提下,最大化回收制动能量,基于仿真实验和理论分析,总结出模糊控制规则库,如表1所示。其中,第i条规则表述形式为:If(V is Vi and z is ziand SOC is SOCithen k is ki)
由于模糊控制器的输出量是一个模糊量,考虑驾驶性能,采用加权平均法进行解模糊。
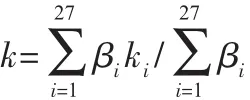
从而得到确切的电机制动力矩比例。
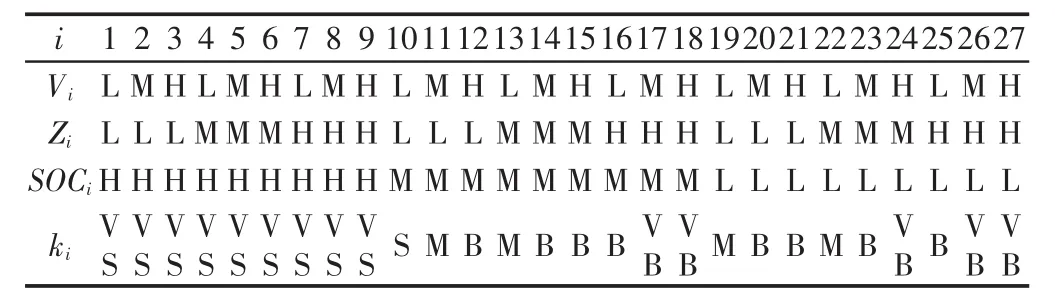
表1 模控制规则库Tab.1 Mode Control Rule Base
4 仿真结果与分析
针对上述制动能量回收控制策略搭建simulink模型,并编译成动态链接库文件(DLL),嵌入AVL-CRUISE整车模型中,模型中的车辆主要参数,如表2所示。
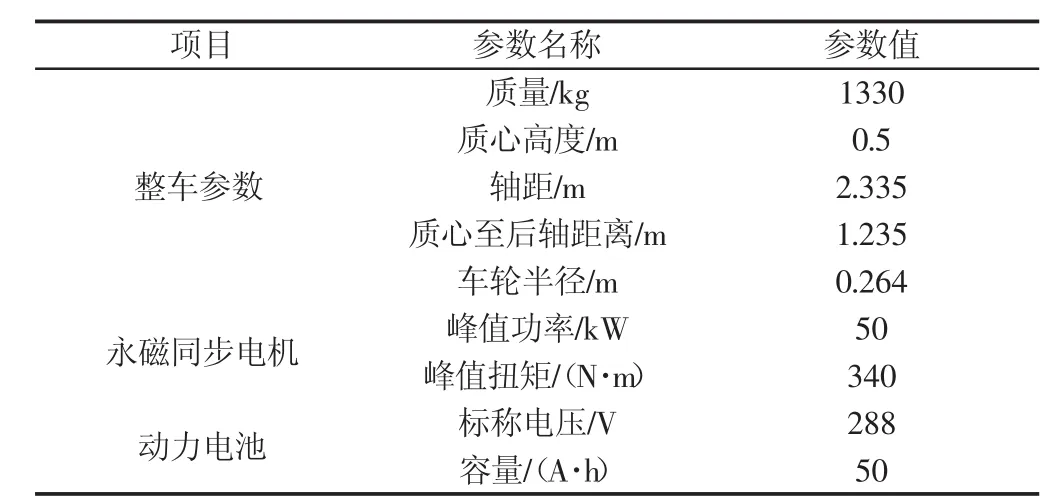
表2 仿真车辆主要参数Tab.2 Main Parameters of Simulation Vehicle
采用新欧洲行驶循环工况(NEDC)和初速度为60km/h的4中不同制动强度对控制策略进行仿真分析(由于仿真车辆最高车速限制,NEDC循环工况最高车速设为100km/h)。仿真初始SOC为0.6,NEDC循环工况仿真结果,如图4所示。仿真结果表明,在NEDC循环工况中,与基于最佳制动效果的再生制动模糊控制策略相比,该控制策略的电机制动扭矩比较大,能够回收更多的制动能量,主要原因是前一种控制策略的前轮制动力分配比例较小,限制了电机再生制动力矩。
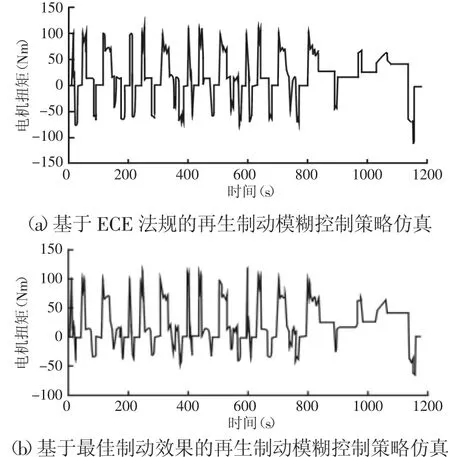
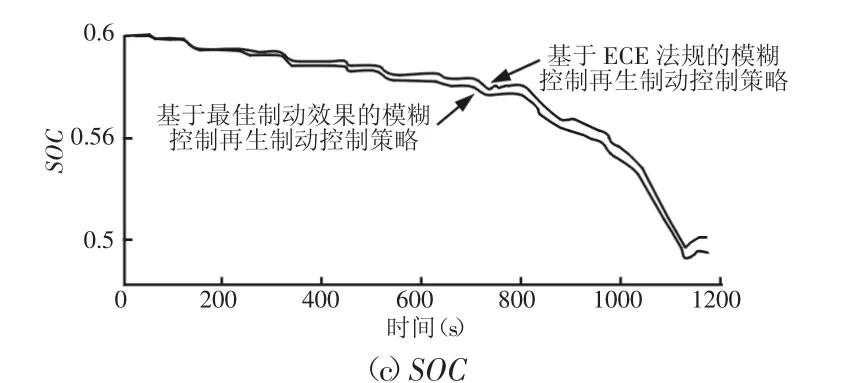
图4 NEDC循环工况仿真Fig.4 The Cycle Simulation of NEDC
4种不同的制动强度仿真设置踏板行程分别为10%、30%、50%和75%,以初速60km/h进行制动,各自代表微度、轻度、中度和重度制动(紧急制动),不同制动力的仿真结果,如图5所示。
从仿真结果中可以看出模糊控制器输出的电机制动力矩比例k随着制动强度、车速的不同有着相应的变化,在满足制动安全性的前提下,能够使机械制动和再生制动能够进行合理的分配。75%制动踏板行程(紧急制动)对应制动强度大于0.7g,此时电机制动力矩为0,这和所制定的控制策略一致。
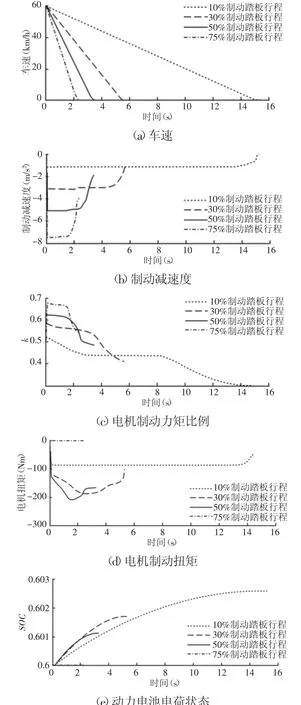
图5 不同制动强度的仿真计算结果Fig.5 The Simulation Results of Different Braking Force
计算所得不同工况的制动能量回收率,如表3所示。从表3可以看出,NEDC循环工况中制动减速度相对较小,制动力主要由电机提供,所以能量回收率高达65.98%。对于4种不同制动强度的仿真,随着制动踏板开度的增加,机械制动介入比例增大,制动能量回收率有所降低。
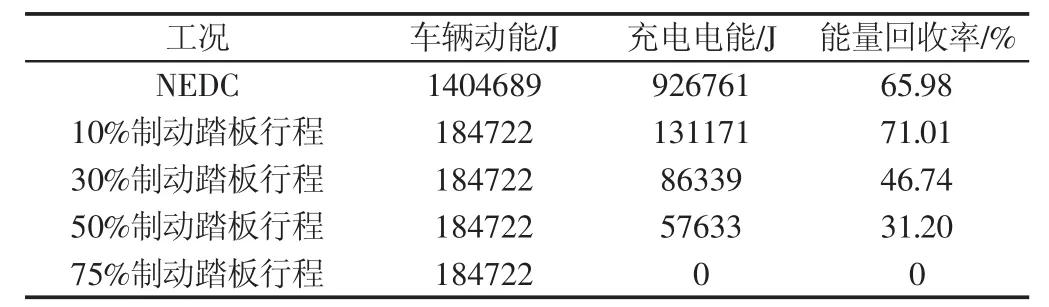
表3 不同工况仿真能量回收率对比Tab.3 Comparison of Simulation Energy Feedback Rate under Different Operating Conditions
5 结论
(1)在遵循ECE法规的基础上,提出了一种再生制动模糊控制策略,并建立了整车模型,选用NEDC工况和4种不同制动强度的工况进行仿真试验,结果表明,该控制策略在制动安全性的前提下,有效的提高了制动能量回收率,在NEDC工况循环中,制动能量回馈率高达65.98%,具有一定的优越性。
(2)设计了以制动强度、动力电池SOC和车速作为输入变量,以电机制动力矩比例作为输出变量的模糊控制器,模糊控制器的输出随着车速、制动强度变化有着相应的改变,很好的实现了机械制动与再生制动的协同工作,具有较强的鲁棒性。
(3)同时获得了不同工况下的再生制动能量回收率,验证了控制策略的有效性。
[1]杨亚娟,赵韩,朱茂飞.电动汽车最大能量回收再生制动控制策略的研究[J].汽车工程,2013,35(2):105-110.(Yang Ya-juan,Zhao Han,Zhu Mao-fei.A study on the control strategy for maximum energy recovery by regenerative braking in electric vehicles[J].Automotive Engineering,2013,35(2):105-110.)
[2]Ramakrishnan R,Hiremath S S,Singaperumal M.Theoretical investigations on the effect of system parameters in series hydraulic hybrid system with hydrostatic regenerative braking[J].Journal of Mechanical Science and Technology,2012,26(5):1321-1331.
[3]高爱云,邓效忠,张明柱.基于最佳制动效果的并联式混合动力汽车再生制动控制策略[J].中国机械工程,2015,26(15):2118-2123.(Gao Ai-yun,Deng Xiao-zhong,Zhang Ming-zhu.Regenerative braking control strategy for PHEV on optimal braking effect[J].China Mechanical Engineering,2015,26(15):2118-2123.)
[4]Ki Y,Lee K,Cheon J.Design and implementation of a new clamping force estimator in electro-mechanical brake systems[J].International Journal of Automotive Technology,2013,14(5):739-745.
[5]余志生.汽车理论[M].5版.北京:机械工业出版社,2009:108-120.(Yu Zhi-sheng.The Theory of Automobile[M].Beijing:Machinery Industry Press,2009:108-120)
[6]石庆生.纯电动汽车能量管理关键技术问题的研究[D].济南:山东大学,2009.(Shi Qing-sheng.Key technologies research on energy management problems of pure electric vehicle[D].Ji’nan:Shandong University,2009.)
[7]刘红亮,董学平,张炳力.电动汽车再生制动控制策略的研究[J].合肥工业大学学报,2012,35(11):1484-1487.(Liu Hong-liang,Dong Xue-ping,Zhang Bing-li.On regenerative braking control strategy for electric vehicle[J].Journal of Hefei University of Technology,2012,35(11):1484-1487.)
[8]郭金刚,王军平,曹秉刚.电动车最大能量回收制动力分配策略研究[J].西安交通大学学报,2008,42(5):607-611.(Guo Jin-ang,Wang Jun-ping,Cao Bing-gang.Brake-force distribution strategy for electric vehicle based on maximum energy recovery[J].Journal of Xi’an Jiaotong University,2008,42(5):607-611.)
[9]刘辉,王伟达,何娇.基于模糊控制的混合动力电动车再生制动系统的建模与仿真[J].汽车工程,2012,34(1):51-56.(Liu Hu,Wang Wei-da,He Jiao.Modeling and simulation of the regenerative braking system in a HEV based on fuzzy control[J].Automotive Engineering,2012,34(1):51-56.)
[10]张亚军,杨盼盼.纯电动汽车再生制动系统的建模与仿真[J].武汉理工大学学报,2010,32(15):91-94.(Zhang Ya-jun,Yang Pan-pan.Modeling and simulation of regenerative braking system for pure electric vehicle[J].Journal of Wuhan University of Technology,2010,32(15):91-94.)
猜你喜欢
成都信息工程大学学报(2021年6期)2021-02-12
电子制作(2019年16期)2019-09-27
小学生学习指导·爆笑校园(2019年6期)2019-09-10
山东冶金(2019年3期)2019-07-10
消费导刊(2018年10期)2018-08-20
山东工业技术(2016年15期)2016-12-01
电子制作(2016年21期)2016-05-17
通信电源技术(2016年1期)2016-04-16
通信电源技术(2016年5期)2016-03-22
红蜻蜓·低年级(2015年11期)2016-02-02
