基于1553B总线的卫星星时同步方法
2018-01-25 08:31张凤张东浩李寅龙李坤
航天返回与遥感 2017年6期
张凤 张东浩 李寅龙 李坤
基于1553B总线的卫星星时同步方法
张凤1,2张东浩1李寅龙1李坤1
(1 北京空间机电研究所,北京 100094)(2 先进光学遥感技术北京市重点实验室,北京 100094)
目前卫星的绝对时间由GPS提供,并通过总线广播的方式将时间信息码发送给各卫星载荷分系统,但各载荷收到时间信息进行相应的处理后都会有一定的延时,所以需要对卫星系统进行时间同步。卫星通常使用的星上时间同步方式为GPS秒脉冲和时间信息广播相结合的方法,但此方法需要占用一定的硬件资源。为了节省硬件资源,并保证卫星星时同步的精度,文章提出基于1553B总线卫星星时同步的方法,使用同步方式字命令和时间信息广播相配合,卫星载荷利用1553B总线控制芯片内部时间标记寄存器计时,计算软件处理延时,降低系统随机误差,进而实现星时同步。经过仿真和测试验证,表明该方法可以将系统时间同步随机误差降低到100ms。该方法采用软件实现,卫星无需提供GPS秒脉冲,节省硬件资源,降低成本,适用于时间同步要求精度高、未对载荷分系统提供GPS秒脉冲的卫星系统。
时间标记寄存器 1553B总线 时间同步 全球定位系统秒脉冲 光学遥感器
0 引言
卫星系统中,为了保证星务计算机与各分系统能够协调工作,需要各分系统之间进行准确的时间同步。文献[1]提出星务校时,控制系统依据星务主机的时间进行校时,从而实现时间同步,由于没有两者的时间基准,单纯依靠软件进行校时,因此精度较低。文献[2]中提出全量校时和增量校时,均采用地面数据注入方式。全量校时用于有较大星时偏差时地面对控制系统时间进行重新设定;增量校时是对分系统载荷进行星时补偿,适用于地面对星时偏差的校正。文献[3]中提出均匀校时,也是采用地面注入校时间隔和补偿量,控制计算机每隔相应时间,自动将星时进行一定补偿,此方法校时精度较低。
近几年来,随着卫星系统性能的不断提高,对时间精度的要求也越来越高,从毫秒级的要求提高到微秒级,甚至纳秒级要求,单纯依赖地面时间注入或星上时间自校正已无法满足有效载荷设备要求[4]。因此,目前卫星主要采用一种高精度校时方式,既能脱离地面,又能保证时间精度的方法,满足有效载荷设备的高精度时间需要。即采用GPS秒脉冲和时间信息广播相结合的方式,一般从GPS接收机引出秒脉冲信号供各分系统使用,此信号在整秒时刻产生,载荷分系统利用GPS秒脉冲对接收到的时间信息进行校正[5-7]。以遥感相机分系统为例,管理单元接收GPS产生秒脉冲的同时,通过总线接收星务计算机发送的该时刻对应的时间广播数据,管理单元通过秒脉冲接口电路将秒脉冲信号转发给信息处理单元,时间信息广播经软件处理后通过内部通讯接口发送给信息处理单元[6-9]。信息处理单元收到秒脉冲信号开启内部计时,结合收到的时间信息,进行星时校正,产生自身时间系统,实现时间同步。该同步方式精度高,但需要设计专门的秒脉冲接口电路,增加了硬件设计复杂性[10-11]。秒脉冲时间同步方式示意图如图1。
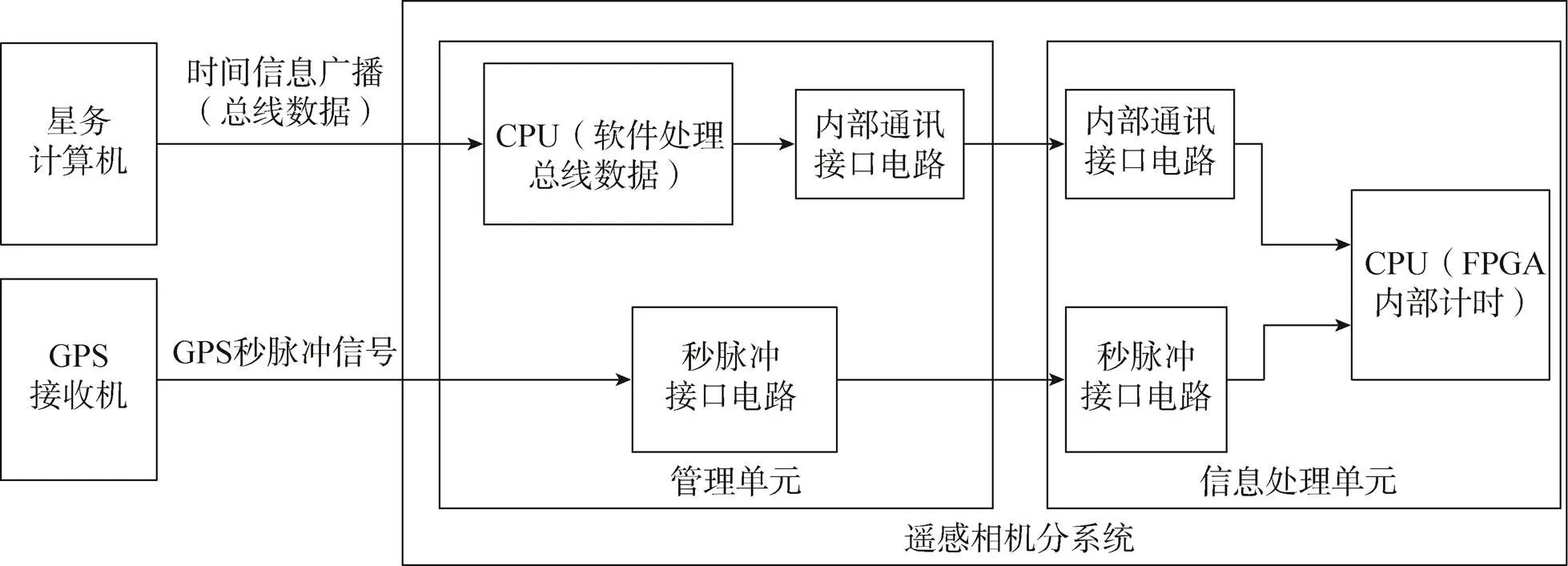
图1 秒脉冲时间同步方式示意图
目前有卫星不提供GPS秒脉冲,因此,本文提出没有GPS秒脉冲的情况下,基于1553B总线的时间同步方法。相机分系统配置1553B控制器芯片,星务计算机几毫秒间隔内先后发送同步方式命令字和时间信息广播信息,开启总线控制器内部时间标记寄存器计时,计时不占用软件资源,不受软件时序调度影响。管理器软件接收时间信息广播并根据通讯协议进行数据组包,组包完成后读取1553B总线控制器中时间标记寄存器的值,将时间信息和时间标记寄存器的计时数据一起发送给信息处理单元。信息处理单元开启内部计时,结合时间标记寄存器计数和时间信息,产生分系统自身时间,实现时间同步。该方法可校正绝对时间信息在遥感相机分系统内处理及传输的延时,降低随机误差,校正后本地时间的准确度为微秒级,可满足目前所有遥感相机对校时精度的要求。
1 基于1553B总线时间同步设计
1.1 系统时间误差分析
造成遥感相机分系统时间误差的因素包括硬件和软件两方面。时间信息广播总线数据传输过程由硬件完成,系统延时固定,可通过测试得到具体延时时间,地面处理时对系统时间进行校正。软件对时间信息广播数据的处理包括管理单元软件接收读取时间信息广播、根据与信息处理单元通讯协议对时间信息数据进行组包和信息处理单元收到时间信息后软件处理。由于管理单元CPU为单片机,受当时软件时序调度影响,软件处理延时存在不确定性,会产生随机误差,内部计时受软件调度影响无法准确得出延时时间,无法进行时间校正;信息处理单元CPU为FPGA,其内部计时为独立模块,计时准确,可精确得出软件处理延时。在卫星未提供GPS秒脉冲的情况下,信息处理单元只能在收到管理单元发送的时间信息后开启内部计时,产生系统自身时间时受管理软件处理延时随机影响,进而使系统延时存在5ms~8ms随机误差,影响成像品质[12-13]。通过上述分析,降低系统随机延时误差,主要降低管理单元随机误差,在不更改硬件设计的情况下,需利用独立于管理软件的计时器实现软件处理延时计时。本文提出了利用1553B总线控制器时间标记寄存器计时。该计时器为总线控制芯片内部计时器,计时过程不受外界干扰,计时精度取决于芯片设置时选择的分辨率,能够准确得出管理软件收到时间信息广播后的处理时间。
1.2 时间同步方案设计
遥感相机管理单元首先完成对1553B总线控制芯片配置。1553B总线控制器高级通讯引擎(Advanced Communication Engine,ACE)其中包含一个内部可读/可写时间标记寄存器(地址05H)。该寄存器是一个CPU可读/写的16位计数器,具有2ms、4ms、8ms、16ms、32ms或64ms最低有效位(Least Significant Bit,LSB)的可编程分辨率选择方案;在同步(无数据)模式方式命令下时间标记寄存器清零,或在同步(有数据)模式方式命令下装载时间标记寄存器,可通过配置1553B总线控制器配置寄存器#2进行选择,如表1,其中15位为最高有效位(Most Significant Bit,MSB),0位为最低有效位。当时间标记寄存器从FFFF卷回到0000时,产生中断请求,并有一位在中断状态寄存器置位。假定时间标记寄存器未被加载或复位,对于64ms/LSB分辨率大约在4s时间内,对于2ms/LSB分辨率大约在131ms时间内发生。考虑到计时长度和计时精度,本设计选用4ms/LSB分辨率计时,选用同步(无数据)模式方式命令[14]。
表1 配置寄存器#2(读/写02H)
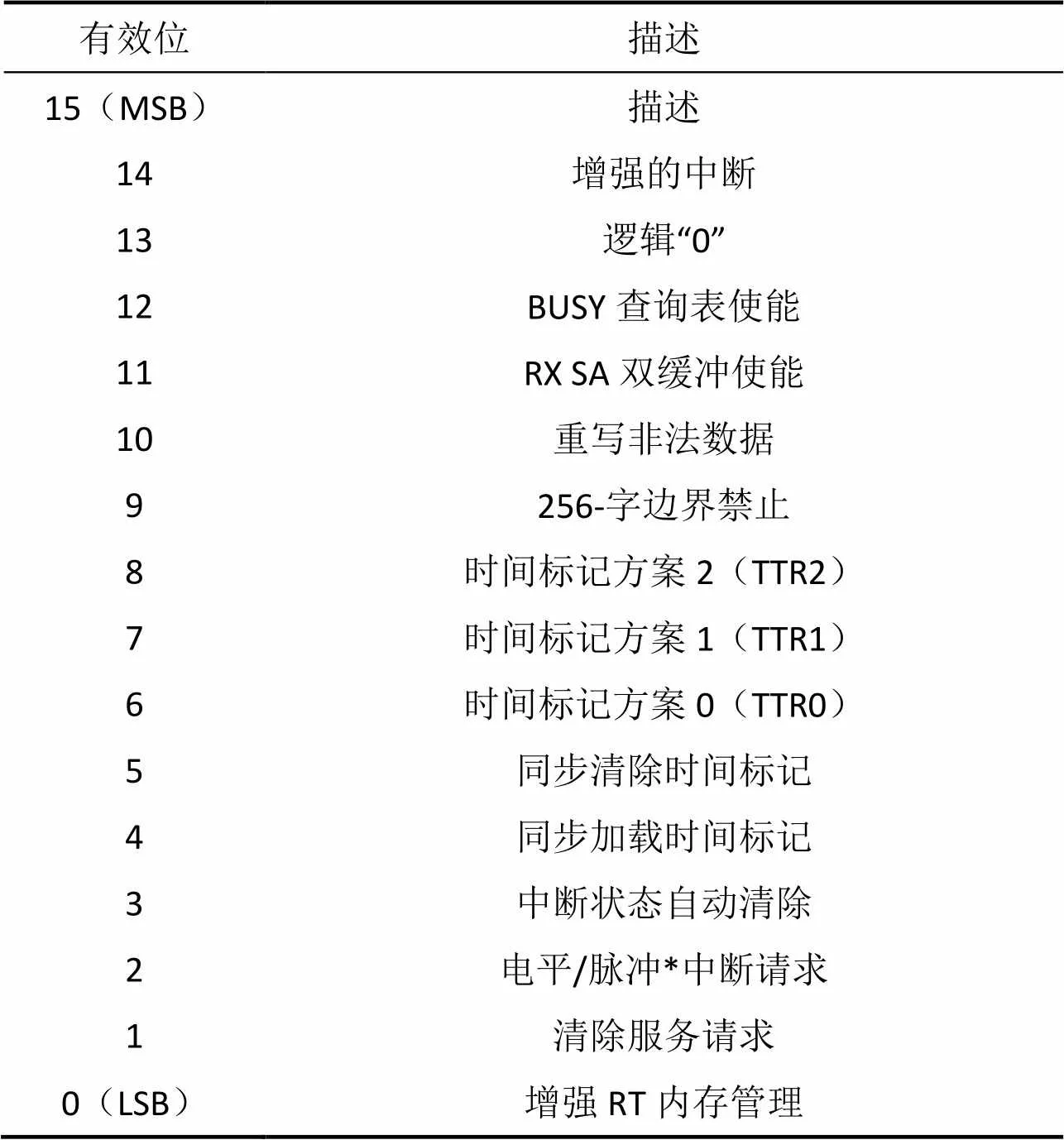
Tab.1 Configuration register #2(Read/Write 02H)
本文介绍的卫星系统时间同步流程如下:
1)星务计算机向管理单元发送同步方式字命令(方式码为00001),100ms后发送时间信息广播数据;
2)管理单元收到同步方式字命令后,1553B总线控制器自动返回应答,同时芯片内部时间标记寄存器清零,重新计数;
3)管理单元收到时间信息广播,软件根据自身时序调度处理时间信息广播,提取时间信息按照内部通讯协议完成数据组包;
4)管理软件读取时间标记寄存器数据,按照内部通讯协议将数据组包;
5)启动数据发送,将时间信息和时间标记寄存器数据发送给信息处理单元,发送过程关中断,保证发送耗时固定;
6)信息处理单元收到时间信息,开启内部计时,并按照协议进行解码,提取绝对时间。绝对时间、时间标记寄存器数据和其自身内部计时相叠加,产生系统绝对时间,完成系统时间同步。
基于1553B总线的时间同步方式示意图如图2。
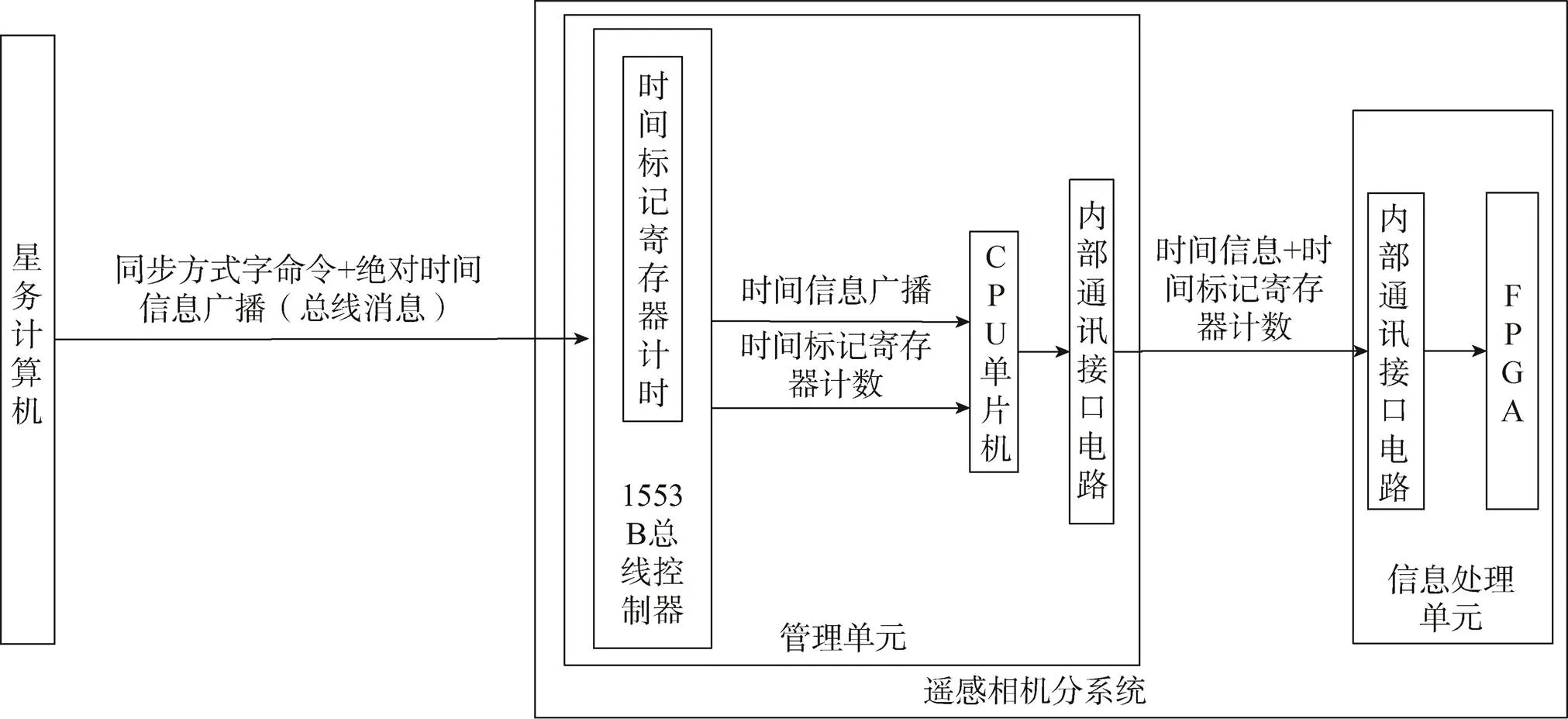
图2 基于1553B总线的时间同步方式示意图
2 基于1553B总线时间同步设计的仿真验证
管理软件在仿真模式下运行,软件读取总线控制器时间标记寄存器的值,同时在单片机管脚P1.2输出负脉冲,设置软件通过内部通讯接口发送时间信息和时间标记寄存器的值给信息处理单元后停止运行。
使用示波器同时监测1553B总线数据、单片机P1.2接口和内部通讯接口,测量1553B总线控制器收到同步方式命令与内部通讯接口开始传输数据间隔1、时间信息广播传输时间2、单片机P1.2接口负脉冲与内部通讯接口开始传输数据间隔3和内部通讯接口传输时间信息及时间标记寄存器数据使用时间4,查看时间标记寄存器的值并得到计时时间5。
管理软件上电开始运行,1553B总线监视器发送同步方式字命令(方式码为00001),100ms后发送广播信息,记录示波器监测数据1234,查看时间标记寄存器的值。由于本设计选取的时间标记寄存器的分辨率为4ms/LSB,所以时间标记寄存器的值乘以4可得到实际的计时时间5。若1=3+5,则认为时间标记寄存器计时正确;若1≠3+5,则认为时间标记寄存器计时错误。数据传输时间轴如图3,测试结果如表2。
从表2测试结果可以看出1=3+5,说明时间标记寄存器计时准确。时间信息广播传输由硬件完成,传输时间固定;管理软件读取时间标记寄存器、通过内部通讯接口发送时间信息和时间标记寄存器数据期间关中断,使用时间固定。2、3和4测试结果可以证明该延时为系统固定延时,管理单元处理时间信息广播延时为3+4+5–2–100ms,随机误差只受时间标记寄存器分辨率影响,本设计选取4ms/LSB,即管理单元随机误差小于4ms。
图3 数据传输时间轴示意图
表2 测试结果
Tab.2 Test result
1553B总线控制器内部时间标记寄存器计时时长由选取的最低有效位分辨率决定,考虑到卫星系统本身对时间同步精度的要求,一般选择较高的计时分辨率,提高计时的精度,因此,计时长度就会较短。由于,计时长度较短,对星务计算机发送同步方式命令和时间信息广播间隔有一定要求,星务计算机必须保证该间隔时间固定,且不能太长;同步方式命令和广播需在同一总线发送,且不插入其他总线数据。
3 结束语
本文介绍的基于1553B总线控制器内部时间标记寄存器的卫星时间同步方法,是利用其计时由总线控制芯片内部自动进行,具有不占用软件资源、不受软件时序调度影响、计时准确的特点。在不增加星务及相机分系统硬件资源的情况下,将相机分系统时间同步随机误差由5ms~8ms,降低到100ms,低成本、高效率地解决了相机分系统成像时间随机误差太大的问题,实现分系统与卫星的时间同步。本设计已成功应用于某卫星系统。
载荷分系统收到卫星时间信息后采用计时方式进行时间校正,使用的计时器必须是独立的,保证计时精度。由于单片机内部计时器不具备这种能力,软件时序调度或响应其它中断会影响计时精度,所以,本设计中计时器使用的是1553B总线控制芯片的内部时间标记寄存器,计时独立且精度高。因此,该设计仅限于以1553B总线通讯的卫星系统,使用其它总线通信的卫星系统,在不依赖硬件情况下实现时间同步的方法还有待进一步研究。
[1] 刘魁星, 桑怀胜, 王茂磊, 等. 卫星导航系统时间同步方法分析与研究[J]. 电视技术, 2010, 34(S1): 132-149. LIU Kuixing, SANG Huaisheng, WANG Maolei, et al. Analysis and Research on Time Synchronization of Satellite Navigation System[J]. Video Engineering, 2010, 34(S1): 132-149. (in Chinese)
[2] 黄飞江, 卢晓春, 吴海涛, 等. 卫星星间自主时间同步方法研究[J]. 计算机科学, 2008, 35(9): 123-125. HUANG Feijiang, LU Xiaochun, WU Haitao, et al. Study on Autonomous Time Synchronization Method Based on Inter-satellite[J]. Computer Science, 2008, 35(9): 123-125. (in Chinese)
[3] 栾锐, 徐卫明, 蒋林宏, 等. 伪卫星定位系统双向时间同步技术[J]. 测控技术, 2009, 28(6): 43-46. LUAN Rui, XU Weiming, JIANG Linhong, et al. Time Synchronization Technologies for Pseudolites Positioning System[J]. Measurement & Control Technology, 2009, 28(6): 43-46. (in Chinese)
[4] 陈祝明, 郭廷源, 江潮抒. 一种MEO卫星星地时间同步的新方法[J]. 电子科技大学学报, 2007, 36(1): 33-35. CHEN Zhuming, GUO Tingyuan, JIANG Zhaoshu. A New Method for Clock Synchronization of MEO Satellite[J]. Journal of University of Electronic Science and Technology of China, 2007, 36(1): 33-35. (in Chinese)
[5] 朱波, 聂桂根. 利用星载GPS接收机进行低轨卫星与卫星时间同步[J]. 测绘信息与工程, 2007, 32(1): 28-30. ZHU Bo, NIE Guigen. On Leo Satellites Time Synchronization with GPS Receivers on Board[J]. Journal of Geomatics, 2007, 32(1): 28-30. (in Chinese)
[6] 王淑芳, 王礼亮. 卫星导航定位系统时间同步技术[J]. 全球定位系统, 2005, 30(2): 10-14. WANG Shufang, WANG Liliang. Time Synchronization Technology of Satellite Navigation and Positioning System[J]. Gnss World of China, 2005, 30(2): 10-14. (in Chinese)
[7] 吕红, 苏云, 陈晓丽, 等. 一种基于人工智能技术的卫星遥感载荷系统方案[J]. 航天返回与遥感, 2014, 35(3): 43-49. LYU Hong, SU Yun, CHEN Xiaoli, et al. A Scheme of Satellite Remote Sensing Payloads Based on Artificial Intelligence[J]. Spacecraft Recovery & Remote Sensing, 2014, 35(3): 43-49. (in Chinese)
[8] 史志敏, 张鑫, 王海英, 等. 应用网络时间协议的卫星综合测试时间同步系统[J]. 航天器工程, 2015, 24(3): 120-124. SHI Zhimin, ZHANG xin, WANG Haiying, et al. Time Synchronization System of Satellite Integration Test Using NTP[J]. Spacecraft Engineering, 2015, 24(3): 120-124. (in Chinese)
[9] 潘腾, 关晖, 贺玮. “高分二号”卫星遥感技术[J]. 航天返回与遥感, 2015, 36(4): 16-24. PAN Teng, GUAN Hui, HE Wei. GF-2 Satellite Remote Sensing Technology[J]. Spacecraft Recovery & Remote Sensing, 2015, 36(4): 16-24. (in Chinese)
[10] 高卫军, 孙立, 王长杰, 等. “资源三号”高分辨率立体测绘卫星三线阵相机设计与验证[J]. 航天返回与遥感, 2012, 33(3): 25-34. GAO Weijun, SUN Li, WANG Changjie, et al. Design and Verification of Three-line Array Camera for ZY-3 High Resolution Stereo Mapping Satellite[J]. Spacecraft Recovery & Remote Sensing, 2012, 33(3): 25-34. (in Chinese)
[11] 尹大伟, 陈忠贵, 朱骏, 等. 基于地面测量的卫星导航系统时间同步技术研究[J]. 飞行器测控学报, 2010, 29(1): 73-78. YIN Dawei, CHEN Zhonggui, ZHU Jun, et al. Research on Time Synchronization Technology of Satellite Navigation System Based on Ground Observations[J]. Journal of Spacecraft TT & C Technology, 2010, 29(1): 73-78. (in Chinese)
[12] 邹红, 纪龙蛰, 邢园丁, 等. 基于FPGA多模时间同步触发系统的研究与设计[J]. 测试技术学报, 2016, 30(2): 114-119. ZOU Hong, JI Longzhe, XING Yuanding, et al. Research and Design of Multi-mode Time Synchronization Triggering System Based on FPGA[J]. Journal of Test and Measurement Technology, 2016, 30(2): 114-119. (in Chinese)
[13] 王峰, 周峰, 郑国宪, 等. 中国空间站光学遥感载荷的发展研究[J]. 航天返回与遥感, 2010, 31(5): 27-31. WANG Feng, ZHOU Feng, ZHENG Guoxian, et al. Study on Development of Optical Remote Sensor of Chinese Space Station[J]. Spacecraft Recovery & Remote Sensing, 2010, 31(5): 27-31. (in Chinese)
[14] 黄波. 1553B总线控制系统时间同步设计[J]. 航天控制, 2008, 26(6): 70-73. HUANG Bo. A Time Synchronization Mechanism for 1553B Data Bus Control System[J]. Aerospace Control, 2008, 26(6): 70-73. (in Chinese)
[15] 陆启省, 南树军, 白沁园, 等. 基于单星定位的火星着陆器初定位方法研究[J]. 航天返回与遥感, 2012, 33(6): 10-16. LU Qisheng, NAN Shujun, BAI Qinyuan, et al. Initial Location Method for Mars Lander Based on Single Satellite Location[J]. Spacecraft Recovery & Remote Sensing, 2012, 33(6): 10-16. (in Chinese)
[16] 陈晓, 张伟, 彭玉明. 基于器间测量的火星进入过程实时高精度导航[J]. 航天返回与遥感, 2012, 33(6): 17-23. CHEN Xiao, ZHANG Wei, PENG Yuming. Mars Entry Real-time Navigation Based on Orbiter Tracking Data[J]. Spacecraft Recovery & Remote Sensing, 2012, 33(6): 17-23. (in Chinese)
[17] 胡芬, 杨博, 唐新明, 等. ZY-3 卫星异轨立体影像几何定位精度分析[J]. 航天返回与遥感, 2016, 37(1): 64-71. HU Fen, YANG Bo, TANG Xinming, et al. Geo-positioning Accuracy Analysis of ZY-3 Cross-track Stereo-images[J]. Spacecraft Recovery & Remote Sensing, 2016, 37(1): 64-71. (in Chinese)
[18] 王跃, 李世其, 张锦龙, 等. 地球静止轨道遥感相机一体化设计[J]. 航天返回与遥感, 2016, 37(4): 40-48. WANG Yue, LI Shiqi, ZHANG Jinlong, et al. Integrated Design Analysis of Remote Sensing Camera on Geostationary Earth Orbit Satellite[J]. Spacecraft Recovery & Remote Sensing, 2016, 37(4): 40-48. (in Chinese)
(编辑:庞冰)
Method of Satellite Time Synchronization Based on 1553B Bus
ZHANG Feng1,2ZHANG Donghao1LI Yinlong1LI Kun1
(1 Beijing Institute of Space Mechanics and Electricity, Beijing 100094, China)(2Beijing Key Laboratory of Advanced Optical Remote Sensing Technology, Beijing 100094, China)
Presently, the absolute time of satellite is supplied by the Global Position System (GPS), and the time information is sent to the payload subsystem through the bus in broadcast. Due to the time delay for the payloads to process the time information received, time synchronization is needed for satellite systems. The method combining the GPS second pulse with the time broadcast is widely used in time synchronization. However, this method needs to consume hardware resources. In order to save the hardware resources and ensure the accuracy of satellite time synchronization, a method is proposed for time synchronization on board, which is based on 1553B bus synchronize mode code and time broadcast. Using the time tag register in 1553B bus controller chip as payload time, the time delay is calculated by the software to reduce the random error and then to realize the time synchronization. The simulation and test results show that the system random error of time synchronization can be reduced to 100ms. As the method is realized by software without GPS second pulse, it is very suitable for the high-precision time system and the system without GPS pulse.
time tag register; 1553B bus; time synchronization; GPS pulse per second; optical remote sensor
TP79
A
1009-8518(2017)06-0092-06
10.3969/j.issn.1009-8518.2017.06.011
张凤,女,1985年生,2006年获北京理工大学学士学位,高级工程师。研究方向为遥感相机管理控制、机构控制软件设计及测试。E-mail:zff_2013@sina.com。
2017-03-02
猜你喜欢
车迷(2022年1期)2022-03-29
三悦文摘·教育学刊(2021年52期)2021-04-27
中国化妆品(2020年9期)2020-10-09
计算机应用(2020年5期)2020-06-07
小学生学习指导(低年级)(2019年10期)2019-11-26
汽车工程师(2019年7期)2019-08-12
小学生学习指导(低年级)(2018年11期)2018-12-03
探测与控制学报(2018年4期)2018-09-11
电子技术与软件工程(2018年1期)2018-03-22
软件导刊(2016年7期)2016-05-14