基于适配性评价的合成孔径雷达景象匹配航迹规划方法研究*
2018-01-30 01:45苏晓静郝梦茜
测试技术学报 2018年1期
张 辉, 苏晓静, 张 聪, 郝梦茜
(北京航天自动控制研究所, 北京 100854)
合成孔径雷达(SAR)景象匹配复合制导系统是事先利用侦查手段获取飞行器途径下方的地物景象(基准图)存于计算机上, 该图像一般是星载SAR影像. 当飞行器飞过预定的位置范围时, 使用SAR对预定地区进行成像(实时图). 将实时图和基准图在计算机上进行配准, 利用基准图地理位置和SAR实时测量信息, 估计出惯导位置和速度偏差, 修正惯导经过长时间飞行所累积的误差, 引导飞行器到达预定目标.
SAR景象匹配概率和匹配精度直接影响着飞行器的定位精度, 如果选择的景象匹配区是单一纹理且自相似的区域, 如海平面、 平坦的沙漠或相似的植被区域, 很难进行高精度的匹配定位, 也就难以修正惯导误差. 可以说, 选择合适的景象匹配区能有效地提高系统的匹配性能. 因此, 必须对飞行器的航迹预先进行规划, 使得成像的实时图尽可能落在适于匹配的区域内, 迄今为止, 大部分匹配区及飞行器航迹的选择完全是由人工完成的. 但是由于选择的景象数据量大、 飞行器航迹约束复杂等原因, 人工选择费时、 费力, 并且受到操作人员的素质、 经验等因素的限制, 人工选择的匹配区及飞行器航迹常常很难满足匹配定位性能的要求.
本文针对SAR景象匹配区适配性准则难以制定、 飞行器航迹规划约束条件复杂等情况, 首先对SAR景象匹配区基准图进行分析, 遵循信息丰富性、 显著性、 唯一性及稳定性4个基本原则, 同时结合SAR匹配算法所关注的匹配特征以满足匹配一致性. 通过以方差、 信噪比、 边缘密度、 信息熵、 绝对值粗糙度及自相关系数等建立基本特征适配向量集, 并通过样本训练得到综合评价准则函数. 在此基础上, 结合弹道飞行器特性, 建立了以最小航迹段长度、 最大拐弯角两项指标为航迹规划约束条件, 在匹配区上进行航迹规划, 对基于适配性评价的航迹规划方法进行探索, 为飞行器弹道规划提供依据.
1 SAR景象适配性分析
SAR景象区域适配性问题, 从分析到实现适配区选择, 是在对图像进行特性分析并结合匹配算法研究的基础上开展的, 本方法针对图像匹配特性提出可以表征图像特征参数的特征向量, 并对特征参数向量进行分析, 通过分析不同的特征评价参数在匹配性能所占的比重和影响, 进行大量的实验统计特性, 对特征参数进行加权融合, 建立不同特征向量和图像适配性的参数模型, 提出综合评价准则, 并按照相应的准则进行景象匹配区选择.
1.1 构建评价特征向量
结合SAR匹配算法所关注的匹配特征以满足匹配一致性. 以信息熵、 信噪比、 方差、 边缘密度、 绝对值粗糙度及自相关系数建立基本特征适配向量集.
1.1.1 基准图信息熵
基准图信息熵是对全局范围内信息丰富性的度量, 值越小, 表明基准图上信息越丰富. 信息熵最大值取在所有像素灰度值均匀分布的时候, 该特征的表达式为
(1)
式中:i为图像像素灰度值;pi为图像像素灰度值的概率分布函数, 即灰度值等于i的像素数与图像总像素数之比.
1.1.2 图像信噪比
该特征反映图像信息和噪声的比值, 反映了图像信息量, 由于SAR图像的噪声为乘性噪声, 通过对数变换将其变为加性噪声后再作处理, 在这里我们使用高斯—拉普拉斯算子作为高通滤波器, 得到噪声图像, 将噪声图像和图像进行方差比值, 计算出信噪比.
1.1.3 全局标准差
该特征反映全图像素灰度值与均值之间的差异程度, 即图像对比特征是否显著, 其值越大图像对比特征越显著, 其定义如式(2)
(2)
式中:M为图像的行数;N为图像的列数;g(i,j)为图像中位置(i,j)处的灰度值.
图像的灰度平均值
(3)
1.1.4 绝对值粗糙度
该特征描述了基准图灰度差异的微小波动, 可以用作局部信息差异的显著性度量, 构造如式(4)
Qref=(Qx+Qy)/2,
(4)
式中:Qx与Qy分别为x方向和y方向局部灰度差异的期望.
1.1.5 边缘密度
边缘密度标准差即为各子图像边缘密度. 此处子图像边缘密度定义为该子图像在边缘算子作用下所得边缘图像的边缘像素点个数. 该特征从基准图纹理分布均匀程度角度反映信息的稳定性, 此处边缘算子选用Touzi算子.
1.1.6 互相关自匹配系数
该特征定义为各子图像加入噪声后与基准图进行相关运算时产生自相关系数, 显然自相关系数越大, 表明该区域抗噪能力越强, 匹配成功率越高.
1.2 制定评价准则函数
评价准则函数应遵循能准确地估计该景象区域的匹配性能. 其主要设计过程通过对图像样本进行训练, 得到每个特征向量的权重, 进而得到综合评价准则函数, 其综合评价准则函数设计过程如图 1 所示.
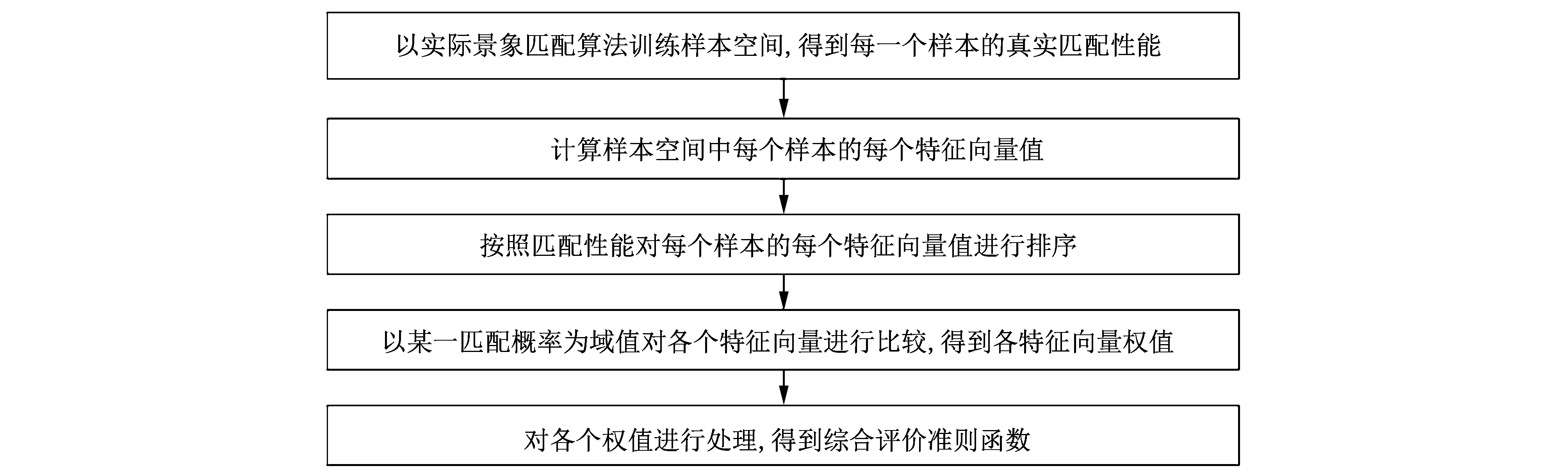
图 1 综合评价准则函数设计过程Fig.1 Design process of comprehensive evaluation criterion function
2 航迹规划
本文中的航迹规划是在结合图像适配性能上开展的, 除了要保证航迹所经过的匹配区域的匹配性能之外, 由于飞行器自身的物理限制和使用要求, 飞行器在飞行过程中需要满足一定的航迹基本约束条件, 针对弹道飞行器的特点, 主要包括最小航迹段长度和最大拐弯角.
2.1 最小航迹段长度
最小航迹段长度是飞行器在开始改变飞行姿态前必须保持直飞的最短距离, 为了减少导航误差, 飞行器一般不希望频繁转弯, 设飞行器航迹由{li|i=1,…,n}组成, 最小航迹段长度为lmin, 该约束可表示为:li≥lmin(i=1,…,n).
2.2 最大拐弯角
该约束限制了飞行器只能在小于或等于预先确定的最大拐弯角范围内进行机动, 该约束条件取决于飞行器的机动性能. 设航迹段i的水平投影为ai=(xi-xi-1,yi-yi-1)T, 最大允许拐弯角为φ, 则最大拐弯角约束可表示为
φ(i=2,…,n-1).
(5)
3 实验分析
3.1 匹配区特征向量提取
通过上述的特征向量, 根据实际的SAR景象基准图进行匹配性分析, 图 2 为TerraSAR星载SAR影像, 该图像主要由沙漠、 戈壁滩和干河道组成, 其中只有干河道属于特征明显且稳定的特征, 因此能否将该特征提取出来是考核本算法的关键.
实现过程为: ① 对原始图像进行各特征向量提取; ② 为了保证各特征向量的一致性, 对特征提取后的数据进行归一化处理; ③ 对各特征数据进行灰度映射, 灰度级越高表示该处的特征信息越明显, 越适于匹配, 各计算结果如图 3~图 8 所示.
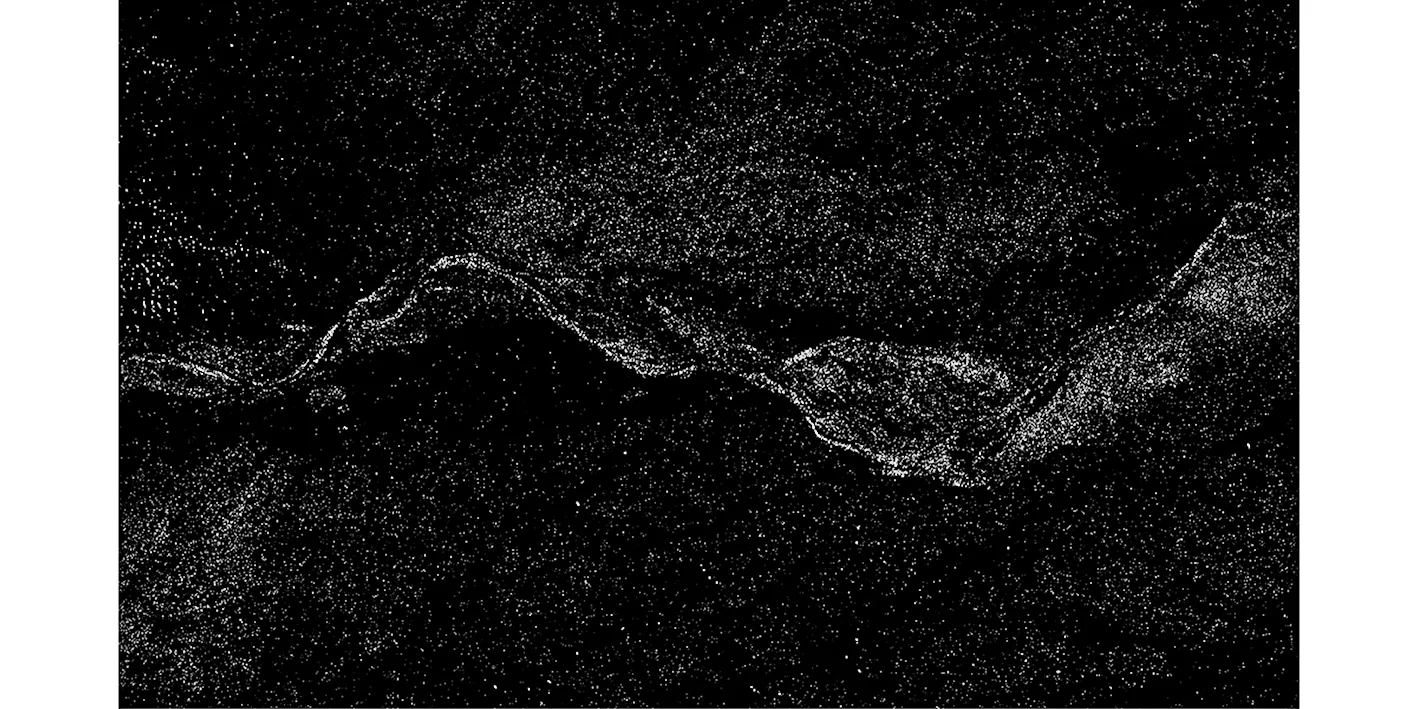
图 2 原始图像Fig.2 Original image
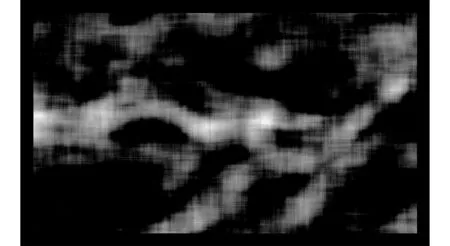
图 3 图像信噪比Fig.3 Image signal-to-noise ratio
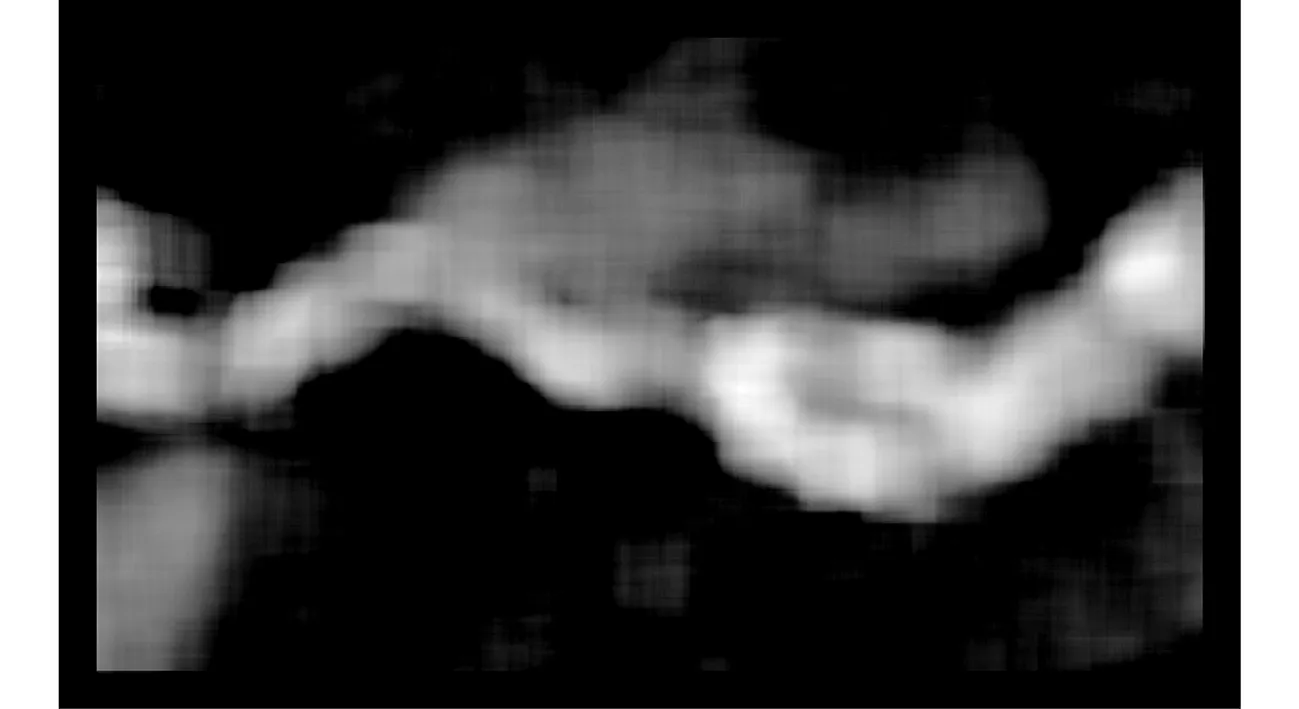
图 4 图像方差Fig.4 Image variance
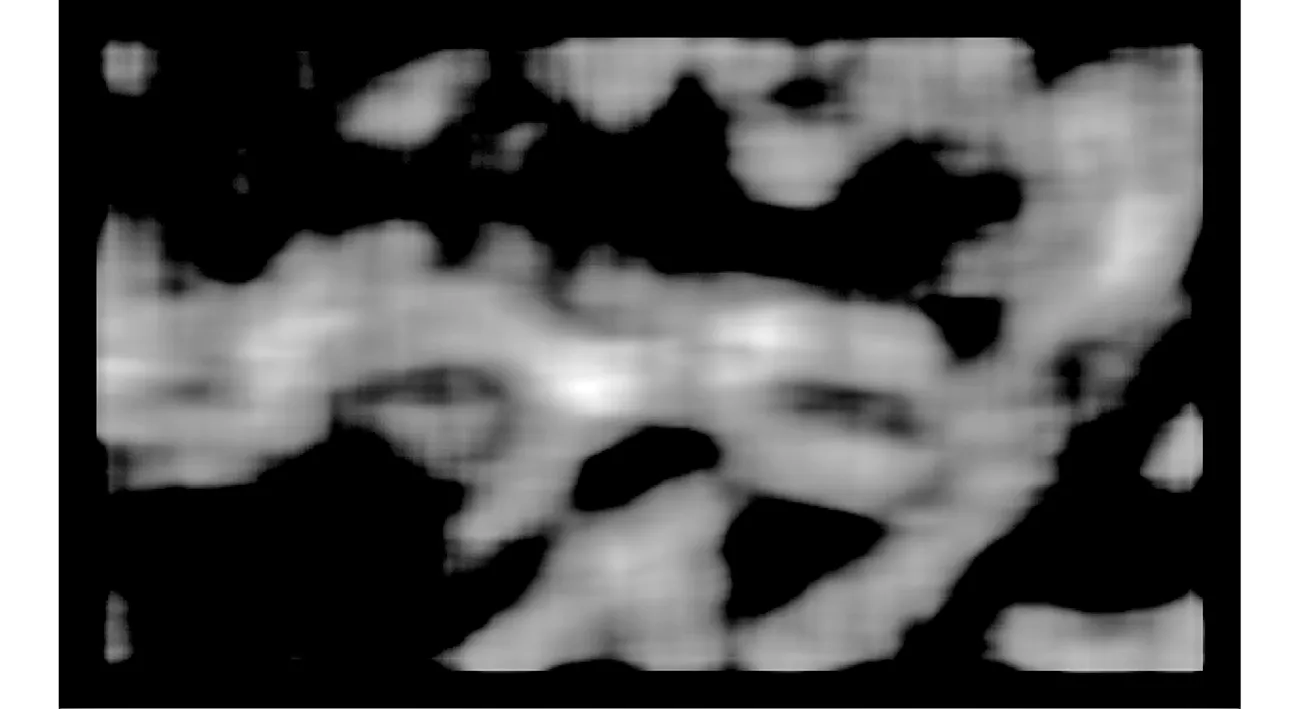
图 5 图像边缘密度Fig.5 Image edge density

图 6 图像信息熵Fig.6 Image information entropy
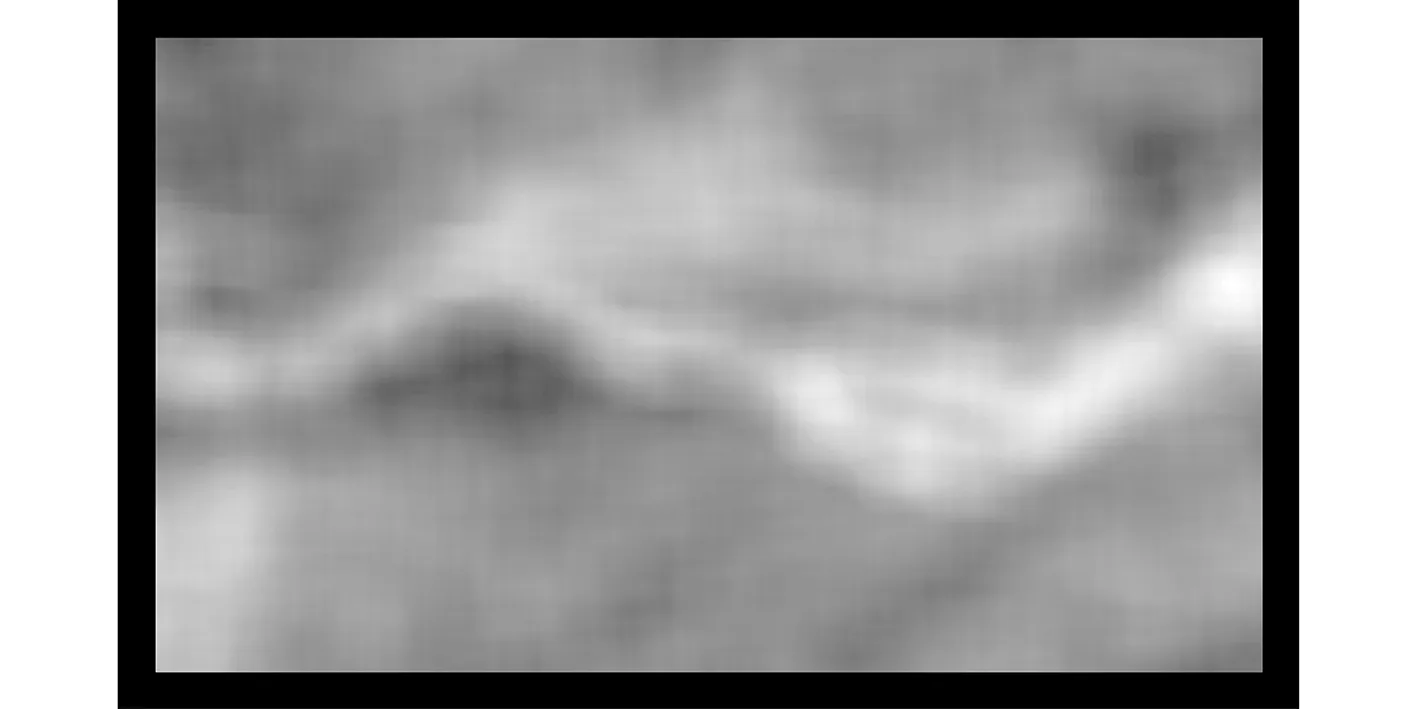
图 7 图像绝对值粗糙度Fig.7 Image absolute value roughness

图 8 图像互相关系数Fig.8 Image correlation coefficient

图 9 综合评价后融合图Fig.9 Integrated evaluation after comprehensive evaluation
3.2 综合评价函数
通过进行实验分析, 并考虑到该综合评价函数的普遍适应性和计算的快速性, 对各个特征向量采用加权融合方法, 每个特征向量的权重一致. 图 9 为经过综合评价后的融合图像.
从图 9 中可以看到, 使用该方法对匹配区域进行评价, 可以将适于匹配的区域(在该图中为河道部分)提取出来, 表明该方法是切实可行的.
3.3 航迹规划
对经过评价匹配的基准图进行航迹规划, 设定飞行器的大致飞行方向和飞行器落点, 通过设定不同的最小航迹段长度和拐弯角可以得到图10航迹, 其飞行方向从左向右,T点为飞行器落点.
图 10 中白色的细线为不同参数得到的航迹规划结果, 结合图9综合评价后融合图可以看到, 所有的航迹均沿着河道(即适配性等级最高的区域)进行飞行, 满足以匹配区匹配性能为基础进行航迹规划的前提和特点, 再结合飞行器的机动性能, 从中选择出最优航迹, 如图 11 所示.
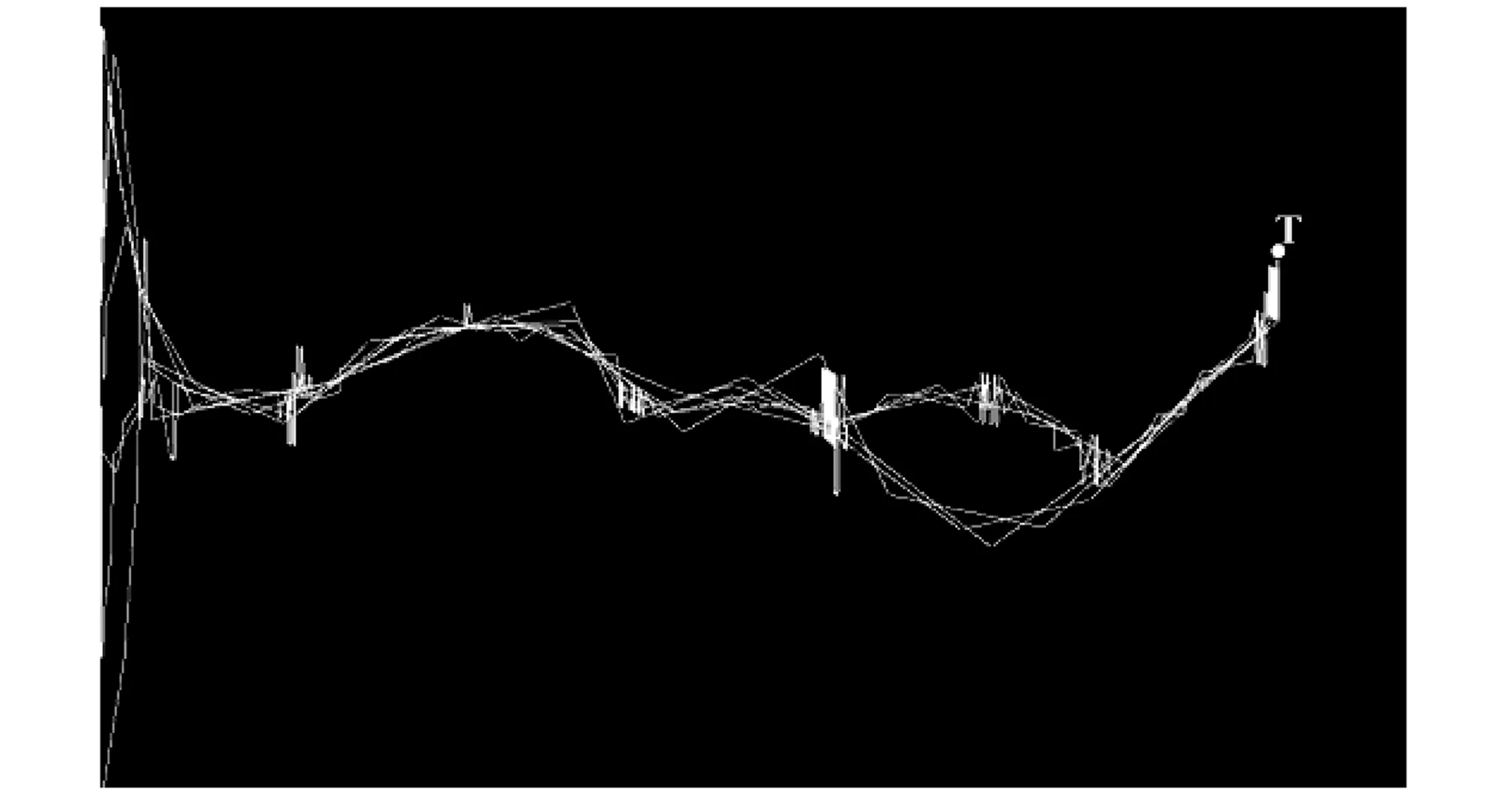
图 10 不同条件下的航迹规划结果Fig.10 Track planning results under different conditions

图 11 航迹规划结果Fig.11 Track planning results
4 结 论
本文针对SAR景象匹配适配性准则难以评价、 飞行器航迹规划约束条件复杂等情况, 以图像信噪比、 图像方差、 图像边缘密度、 图像信息熵、 图像绝对值粗糙度及图像自相关系数建立基本特征适配特征向量, 并对各特征向量进行样本训练和实验验证, 得到SAR景象适配性综合评价函数. 在此基础上, 结合弹道飞行器特性, 建立了以最小航迹段长度、 最大拐弯角两项指标为航迹规划约束条件, 在匹配区上进行航迹规划. 实验结果表明: 该方法可以规划出满足匹配性能要求的航迹, 为飞行器弹道规划提供依据.
[1] 王晓静, 徐大新, 许高升. 用于信号、 图像和景象匹配的特征区选择方法[J]. 红外与激光工程, 2002, 31(5): 378-381.
Wang Xiaojing, Xu Daxin, Xu Gaosheng. Subset selection in signal, image and scene matching[J]. Infrared and Laser Engineering, 2002, 31(5): 378-381. (in Chinese)
[2] 江标初, 陈映鹰. 层次景象匹配区选取准则[J]. 同济大学学报(自然科学版), 2007, 35(6): 830-833.
Jiang Biaochu, Chen Yingying. A rule of selecting scene matching area[J]. Journal of Tongji University (Natural Science), 2007, 35(6): 830-833. (in Chinese)
[3] 李俊山, 李旭辉, 罗蓉, 等. 不同传感器图像的景象匹配区选取准则研究[J]. 微电子学与计算机, 2007, 24(1): 210-213.
Li Junshan, Li Xuhui, Luo Rong, et al. Research on selection criterion of scene matching field for different sensors[J]. Microelectronics & Computer, 2007, 24(1): 210-213. (in Chinese)
[4] Bustos J P, Donoso F, Guesalaga A, et al. Matching radar and satellite images for ship trajectory estimation using the Hausdorff distance[J]. IET Radar Sonar Navig, 2006, 1(1): 50-58.
[5] 赵锋伟, 刘扬, 沈振康. 景象匹配评估系统中图像特征指标的选择(一). 图像统计特征[J]. 红外与激光工程, 2001, 30(4): 265-269.
Zhao Fengwei, Liu Yang, Shen Zhenkang. Selection of image feature set in performance evaluation system of scene matching algorithm(PartⅠ: Image statistic feature)[J]. Infrared and Laser Engineering, 2001, 30(4): 265-269. (in Chinese)
[6] 付文兴, 王建民, 金善良. 一种实用的景象匹配区选择方法[J]. 宇航学报, 2003, 24(4): 348-353.
Fu Wenxing, Wang Jianmin, Jin Shanliang. A practical method for selecting scene matching area[J]. Journal of Astronautics, 2003, 24(4): 348-353. (in Chinese)
[7] 刘扬, 姚娅媚, 李兵. 景象匹配置信度计算方法的实验分析[J]. 红外与激光工程, 2002, 31(5): 383-386.
Liu Yang, Yao Yamei, Li Bing. Experimental analyzing on calculation of confidence level for image matching[J]. Infrared and Laser Engineering, 2002, 31(5): 383-386. (in Chinese)
猜你喜欢
九江职业技术学院学报(2022年1期)2022-12-02
保定学院学报(2022年2期)2022-04-07
小读者(2019年20期)2020-01-04
青年歌声(2019年12期)2019-12-17
小资CHIC!ELEGANCE(2019年41期)2019-12-10
小太阳画报(2018年2期)2018-05-14
许昌学院学报(2018年4期)2018-05-02
北京航空航天大学学报(2017年7期)2017-11-24
中华建设(2017年1期)2017-06-07
北京航空航天大学学报(2016年6期)2016-11-16