
不同车载工况下桥梁振动响应试验
2018-02-20 12:09李顺才
噪声与振动控制 2018年6期
梁 丽,李顺才,2
(1.江苏师范大学 机电工程学院,江苏 徐州 221116;2.江苏师范大学 江苏圣理工学院,江苏 徐州 221116)
车辆通过桥梁时,车载及其移动效应会引起桥梁结构振动,而桥梁的振动反过来又会影响车辆的正常行驶。桥梁在车辆通过时除了要承受静力作用,还要承受由于振动而产生的惯性力。这些力的长期作用,会导致桥梁结构产生疲劳,降低桥梁的结构稳定性、缩短桥梁使用寿命。当移动车辆对桥梁的激振频率接近于桥梁的某阶固有频率时,会产生共振现象,桥梁振动加剧,将直接威胁人们的生命安全,因而移动载荷作用下桥梁的振动响应一直是交通安全研究的一个重要课题。
桥梁振动问题的研究始于铁路桥梁,人类自1825年建成第一条铁路以来,便开始探索、研究列车-桥梁的相互作用。尔后,随着公路桥梁的广泛应用,人们提出了许多求解车载作用下桥梁动力响应的简便计算方法。Law和Zhu用能量法推导出车-桥耦合方程,分析了桥面不平整度和车辆制动因素对多跨梁振动响应的影响[1];Yang[2]等采用模态级数展开法分析了自由和强迫振动下含裂纹梁的响应;Zhong[3]等建立了考虑预应力效应的桥梁-车辆模型证实了预应力对车辆的最大垂直加速度有显著影响;An[4]等人依据弹性系统的总势能平衡原理和定位原则建立了车-桥耦合系统的动力响应方程,研究了大跨度连续梁桥在车载作用下的动力响应;王解军[5]提出了移动车辆荷载作用下大跨桥梁随机振动的计算模式;叶茂[6]等人建立了多个移动车辆系统-桥的耦合力学分析模型,给出了整个车-桥耦合系统演变随机响应的求解方法;袁宏智[7]等人将漂浮体系的斜拉桥结构简化成两端简支且中间离散弹性支撑梁、变地基系数梁和均匀地基系数地基梁3种模型,并建立了移动载荷作用下斜拉桥结构的动力学方程;程帅奇[8]等讨论移动简谐力作用下变截面桥梁的振动,为研究车载对桥的作用提供了一种简便方法。
随着计算机科学技术的发展,有限元模拟成为研究车-桥耦合系统动力响应的主要手段。Lu等人[9]应用有限元法将含裂纹桥梁结构离散为两跨弱耦合Euler-Bernoulli梁模型,研究了该系统由于局部损伤而引起的振动模态局部化现象;赵俊[10]等运用Ansys软件建立了裂纹梁模型,对移动载荷进行了瞬态分析;Li[11]等用直接刚度法建立了一种由三维车辆模型组成的耦合列车-桥系统模型,采用弹性有限元法计算桥梁动应力响应,并通过试验验证了该方法的准确性;Zeng[12]等人利用有限元模型和多体系统对高速行驶的车载作用下的桥梁的动力响应进行了研究;Li[13]等通过建立精细的三维有限元模型来表征桥梁的复杂结构力学性能,并建立了车辆-桥耦合振动(VBCV)模型和16自由度车辆模型,以模拟车辆行驶时的动态行为;张亚宾[14]等人利用ANSYS软件模拟计算了车辆以不同速度通过桥梁时,桥体的动态响应;陈强[15]等人采用有限元法和振型叠加法相结合的建模方法,分析了支撑梁在具有大速度、加速度或大质量的移动载荷作用下动力响应问题;范琪[16]等人采用有限元法对匀速移动常量力和匀速移动简谐力作用下简支梁桥的动态响应进行了研究。
现有文献对桥梁振动响应的研究大多集中在理论分析和数值模拟两方面,而大部分文献中给出的用于求解桥梁振动响应的理论计算方法又较为繁琐,且给出的结果一般为数值解,无法获得精确的解析解。另外,现有文献多通过构建车-桥模型,通过数值模拟软件模拟分析桥梁振动,或通过搭建室内试验台进行测试,但这2种方法存在2个缺点,其一,现有数值模拟软件应用较为广泛的为ANSYS,但要熟练操作该软件前期需花费大量精力和时间进行学习,而室内试验台即便按原型按比例进行缩小复制,试验过程中仍与实地测试有所差别,导致最终数据存在误差。且搭建试验台需充足资金和空间,条件限制过大,因而整体上现有文献中关于桥梁振动的实测成果相对较少。现场实测受设备、环境、车载状态等多种因素影响,还需实行交通管制,因而较难实现。本文主要通过试验研究3种车载工况下桥梁的振动响应,探索车载工况、车载速度及车载运行方向对桥梁振动响应的影响。
1 移动车载作用下单跨简支梁振动响应的理论研究
不失一般性,本文以单跨简支梁为理论分析模型,如图1所示。

图1 单车载作用下单跨简支梁力学模型
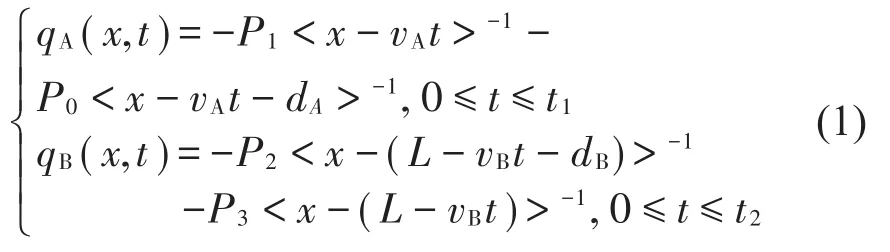
桥梁上分别作用有以速度vA和vB匀速正向及反向行驶的车载A、B,P0和P1分别为A车分配到前端车轮和后端车轮的重量,P2和P3分别为B车分配到前端车轮和后端车轮的重量;dA、dB为A、B 2车前后轮之间的距离;R0和R1分别为2个支座的约束反力;设t=0时,桥梁静止且车载A、B分别位于桥梁的最左端和最右端。当移动载荷A、B分别向右端和向左端行驶时,对图1梁的响应进行求解。
为建立移动载荷作用下单跨简支梁的振动响应方程,首先引入奇异函数[17]

式中:括号<>一般称为麦考利括号。
当n≥0时,
当n<0时
梁的横向强迫振动方程为

其中:EI为梁的抗弯刚度,ρ为该梁的单位体积质量,A为该梁的横截面积。
设单跨简支梁横向强迫振动解为

其中:ηi(t)称为正则坐标,Yi(x)为经过归一化处理的正则振型[18]


可分别计算出正则广义力为

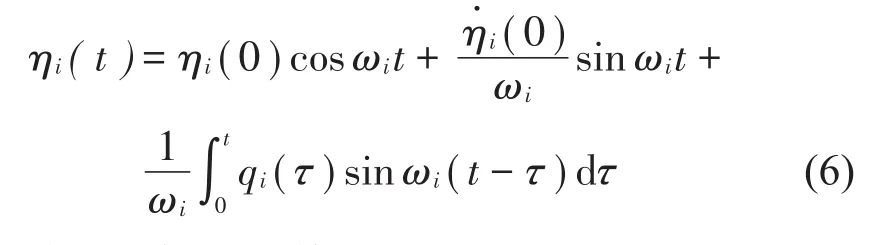
初始时刻桥梁是静止的,ηi(0)=0,η˙i(0)=0[18],则正则坐标响应为
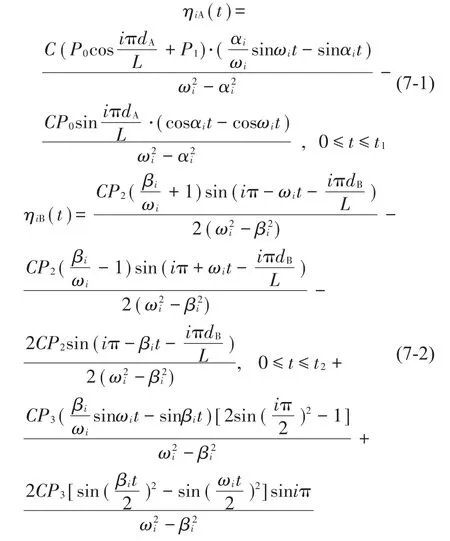
将求出的正则响应代入方程式(3),即可得到车载通过时桥梁的振动响应。
由上述推导可知,车载速度、行驶方向及车载重量影响桥梁各截面的振动响应。弹性范围内梁的振动响应与车载重量成正比,同向多车载作用下的响应可通过单车载作用下的响应进行叠加得到。下面以双车同向或相向行驶时的桥梁为例,对比分析不同车载工况、不同车载速度下单跨简支梁的振动响应。
假设单跨简支梁上同时作用有同向行驶或相向行驶的2个车载。为便于比较分析其他因素对试验结果的影响,选取A、B 2车的车型完全相同,车载为别克,车重 1 220 kg,则P0=P2=7 320 N,P1=P3=4 880 N,前后车轮间距dA=dB=2.64 m。给定车载的移动速度为vA=vB=10、20、30、40 km/h。桥长L=60 m,单位体积质量ρ=3 125 kg/m3,抗弯刚度EI=0.532 TN·m2;横截面积A=14 m2。运用Mathcad分别求解车载正向及反向行驶时的振动响应。由式(3)得到位移,求导后得到加速度响应。表1给出了最大振动加速度amax及其所在截面xm。

表1 双车载作用下桥梁的最大加速度及其所在截面xm
根据表1可知:
(1)在不考虑阻尼及其他因素影响的理想模型中,车速对桥梁的振动加速度影响不大;
(2)双车同向行驶时,沿长度方向,桥梁的最大振动加速度位置位于离出发点桥梁的四分之一处。之后沿着车载移动方向,各截面加速度振幅呈衰减趋势;
(3)同重量的双车载相向行驶时,桥梁的振动加速度沿长度方向近似按正弦规律分布。
2 不同车载工况下桥梁振动响应的试验研究
2.1 测试设备及测试原理
以江苏师范大学校内玉泉桥为测试对象,测试设备为江苏泰斯特集团生产的TST5925EV无线遥测动态应变测试分析系统,如图2所示。该测试系统主要由测试分析软件、多个TST5925EV无线遥测动态应变采集模块、TST126传感器、天线、无线路由器,移动电源及笔记本电脑等组成。该系统采用Wi-Fi无线传输技术,可靠传输距离约200 m,每台计算机可同时控制16个采集模块;该采集模块采用嵌入式GPS模块,实现多台同步采样。

图2 TST5925EV无线遥测动态应变测试分析系统
2.2 试验方案及测试步骤
2.2.1 测点布置
玉泉桥桥长约为60 m、宽度为7 m,双向单车道,有大约3度左右的坡度,该桥为4孔拱桥,下层为花岗岩,上层为平铺型混凝土板梁(如图3所示)。

图3 玉泉桥
在玉泉桥桥面两侧各均匀设置4个测试点,共8个测点(如图4、图5所示);相邻2个测点之间距离为2 m,将8个TST126传感器分别放置在各个测点处,底端用橡皮泥与地面固定以保持水平。

图4 测点分布示意图

图5 现场测点分布
将TST126传感器调至0档(加速度档),桥面左右两侧各放置一个TST5925EV采集模块,每个采集模块连接4个TST126传感器,对应软件采集通道、传感器编号及传感器灵敏度如表2所示。
2.2.2 测试方案
测定车载速度、车载数量及车载运行方向对桥梁振动响应的影响,设计3种试验方案:
方案一(单车载):单一车载以给定速度10 km/h、20 km/h、30 km/h、40 km/h由西向东在桥上驶过,通过TST126传感器记录各个测点的加速度响应;
方案二(同向双车载):两车同时以给定速度10 km/h、20 km/h、30 km/h、40 km/h由西向东同向驶过桥梁;
方案三(相向双车载):2车同时以给定速度10 km/h、20 km/h、30 km/h、40 km/h,向驶过桥梁,即一车由东向西,另一车同时由西向东行驶;
2.2.3 试验步骤
(1)8台TST126传感器分别对应接入1号和3号TST5925EV采集模块;
(2)两台TST5925EV采集模块分别接入发射天线,无线路由器插孔内接入网线及接收天线,网线另一端接入笔记本电脑;
(3)在认真检查所有接口是否接触良好,检查所有装置是否安全可靠后,接通并打开仪器的电源;
(4)在配套的TST5925EV无线遥测动态应变测试分析软件上设置加速度工程单位为mm/s2,采样频率为200 Hz,分析频率为78.13 Hz,采样模式为连续采集,触发方式为自由触发,测量类型为电压测量,并根据传感器编号设置对应通道灵敏度(如表3所示),窗类型为矩形窗,每次采样时间5分钟。
(5)采集前,进行平衡与清零,随后在车载启动时点击开始采集,车载驶下桥梁时点击停止采集。
3 试验结果及分析
3.1 单一车载作用下桥梁各截面的加速度响应
根据试验测试结果,单车载以10 km/h的速度由西向东驶过桥梁时,截面A处的加速度时域曲线如图6所示。
由该曲线可得1号和5号传感器所测得的amax分别为3.53 mm/s2及2.82 mm/s2,由于1号及5号传感器位于同一截面,为便于分析,对同一截面两个传感器数据取平均得该截面处的amax为3.175 mm/s2。由于汽车由西向东驶过截面,故设定西侧为起始位置,则各截面所处的具体位置及单一车载以20 km/h、30 km/h、40 km/h的速度驶过桥梁时各截面处的加速度最大值amax如表3所示。

表2 采集通道、传感器编号及传感器灵敏度V/(mm∙s-1)
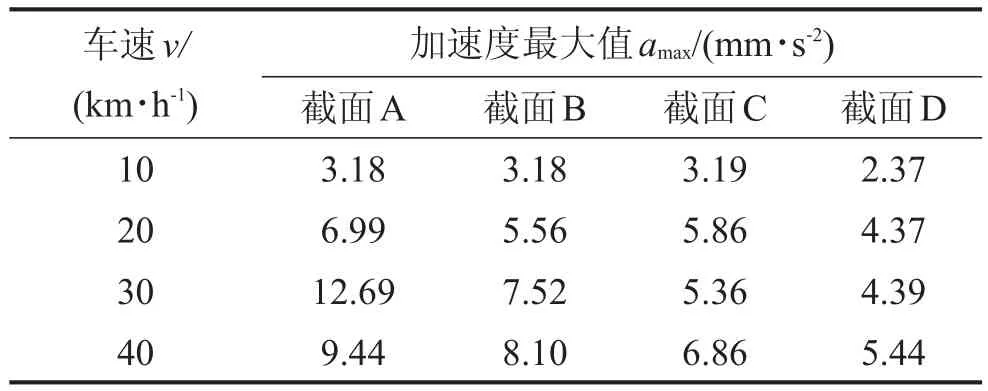
表3 单一车载行驶时各截面处的amax
根据表3可知:
(1)随车速增大,各截面amax总体呈递增趋势;
(2)车速较低时,各截面的amax相差不大,当车速为30 km/h时,amax值最大;
(3)相同车速下,由于截面A处在跨中无桥墩位置处,故截面A处的amax最大。
3.2 双车同向及相向行驶时桥梁各截面加速度响应
同理可得到双车载以不同速度同向及相向驶过桥梁时各截面处的amax如表4所示。
由表4可知:
(1)车速较低时,各截面amax相差很小;
(2)相同车速时,截面A处的amax最大;
(3)双车载同向行驶时,截面A、B的amax随车速的增大而增大;双车载相向行驶时,截面B、C处的amax随车速的增大而增大;
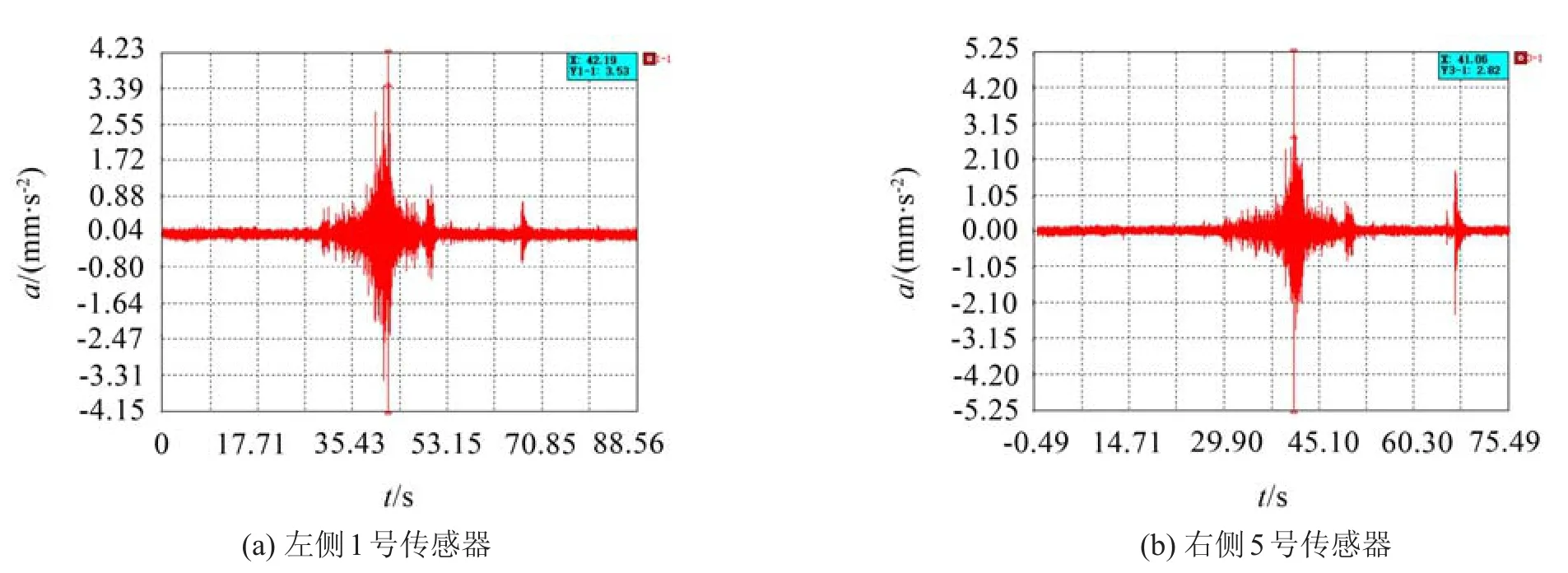
图6 单车载作用下截面A处两侧的加速度时域曲线
(4)双车同向行驶时,截面C、D处的amax随车速的增大呈先增后减趋势;而双车相向行驶时,截面A、D处的amax随车速的增大呈先增后减趋势,主要原因在于桥东西两侧刚上桥面处各存在一减速带,人为驾驶车辆在车速较大靠近减速带时下意识进行了减速,导致结果出现误差。

表4 双车载同向及相向行驶时各截面处的amax
(5)根据理论分析,同向双车载作用下桥梁的amax应为单车载作用下的两倍,但根据实测数据,同向双车载作用下桥梁的amax较之单车载作用下amax的两倍要小,主要是因为实测时桥梁的阻尼对振动有影响,理论分析没考虑阻尼作用。此外测点分布不严格对称,且车载行驶由人为控制,有误差。
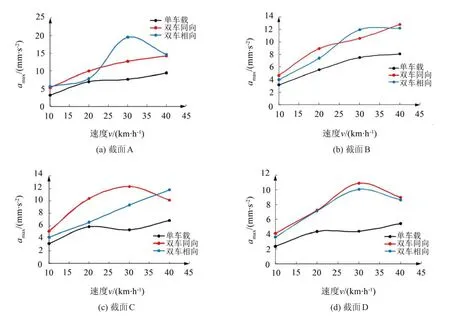
图7 不同工况下各截面最大加速度随车速的变化曲线
3.3 同一截面不同工况下的加速度峰值比较
由表3、表4可绘制出不同车载工况下各截面最大加速度amax随车速的变化曲线,如图7所示。
由图可知:
(1)单车载作用下,桥梁的amax最小,与理论计算一致;
(2)对于截面A、B,双车相向行驶时的amax最大,而对于C、D截面双车同向行驶时的amax最大。
(3)各截面在车速为30 km/h时的amax最大;
(4)截面B与截面C处的amax相近,由理论分析可知,对称截面处的amax应相同,但截面A与截面D处最大加速度值相差较大,结合试验现场可知,由于截面D处设置的测点位于桥墩处导致最大加速度值较小;
(5)综合图7中4图可知,由于截面A处于跨中无桥墩处,故截面A处的amax最大。
4 结语
本文通过理论及无线动态振动测试技术研究了桥梁在不同车载工况及不同车载速度下的振动响应,得到了各截面加速度峰值随车载速度的变化曲线、各车载速度工况下不同截面加速度峰值的变化规律,主要结论如下:
(1)根据实测,不同车载工况作用下,由于截面A处于跨中无桥墩处,该截面处的amax最大;车速较低时,各截面amax相差很小;总体上来说,当车速为30 km/h时,各截面的amax最大;
(2)根据实测,同向双车载作用下桥梁的amax较之单车载作用下amax的两倍较小,与理论分析结果不一致,主要是由于现场实测时,所选用的两车载型号并非完全一致,理论分析时没有考虑桥梁的阻尼作用,人为控制车载行驶速度,导致误差产生;
(3)对于桥东A、B两个截面,车速较小时,双车同向比双车相向时梁的加速度峰值高;而在车速较大时,情况则相反;对于桥西C、D两个截面,双车同向均比双车相向时的加速度峰值高;
(4)由于测试时总的车速不高,无线动态设备采集频率范围有限,故本文未做频域分析,以后可以选取较大的多跨桥梁进一步进行试验研究并进行相应的时域、频域分析。
猜你喜欢
当代水产(2022年6期)2022-06-29
汽车实用技术(2022年10期)2022-06-09
铁道通信信号(2020年8期)2020-02-06
汽车维修与保养(2019年3期)2019-06-19
汽车观察(2018年12期)2018-12-26
装备制造技术(2018年8期)2018-10-17
金桥(2018年4期)2018-09-26
劳动保护(2018年8期)2018-09-12
汽车维护与修理(2018年1期)2018-04-04
作文周刊·小学一年级版(2017年27期)2017-08-10
