基于模糊免疫PID算法的施肥营养液pH值调节
2018-05-08 06:28牛海霞
江苏农业学报 2018年2期
刘 玲, 牛海霞
(内蒙古机电职业技术学院,内蒙古 呼和浩特 010070)
肥液pH值调节控制是肥料生产行业中的一个研究热点。目前研究主要集中在酸碱中和过程模型研究以及pH值控制两个方向。
pH中和过程模型可以用全混合厌氧反应器(Continuous stirred tank reactor,CSTR)模型来表示。Niu[1]通过设定一个变量,该变量是与中和过程相关的强酸变量,通过使用该变量将酸碱中和过程非线性问题线性化。Galán[2]提出酸和碱性质不同会导致中和时滴定特征曲线区别很大,并且发现在相同实验条件下弱酸在中和过程中所需的滴定量要大于强酸。董全成等[3]提出了反应不变量的中和过程模型,该模型则是基于电离平衡理论的。除了上述关于酸碱中和的机理模型研究外,国内外学者还研究了基于机理模型的pH值控制算法,比如景兴红等[4]提出的逆模型pH值控制算法,何青海[5]提出的基于内模控制算法的pH值控制器设计等。李加念[6]在中和反应系统中采用了多线性模型切换的方式,利用模糊算法进行模型切换来解决肥液pH调节过程中的非线性问题。魏正英[7]采用类似方法,将pH值调节过程模型中分为若干子模型,通过拟合的方式构建成误差较小的子模型,以此实现准确的pH值控制。
pH值调节存在过程模型建模困难以及pH值控制非线性问题,针对这类问题,本试验设计了基于模糊免疫PID算法的施肥营养液pH值调节控制系统。
1 施肥液pH值控制系统总体设计
1.1 系统设计
整个肥液pH值调节平台设计框图如图1所示,整个系统一共有3个输入口,分别为酸液输入口、肥料液输入口、灌溉水输入口。3个输入口将对应物料输送至混合罐进行混合反应。输出口输出的是混合反应后的肥液,该肥液经过加压施肥泵传送至田间管路对农作物进行施肥。酸液需要经过过滤器、粗调阀,文丘里后注入到混合罐中,管路中的粗调阀负责调节当前酸液物料的流量。快速调节阀则是由控制器控制,控制物料流速,流量计负责记录当前物料的流量。本系统使用了2个pH传感器负责检测混合后的肥液pH值。2个传感器分别采集数据,计算差值,根据差值的大小判断数据是否有效,如果差值相近,则采用平均值作为有效数据。
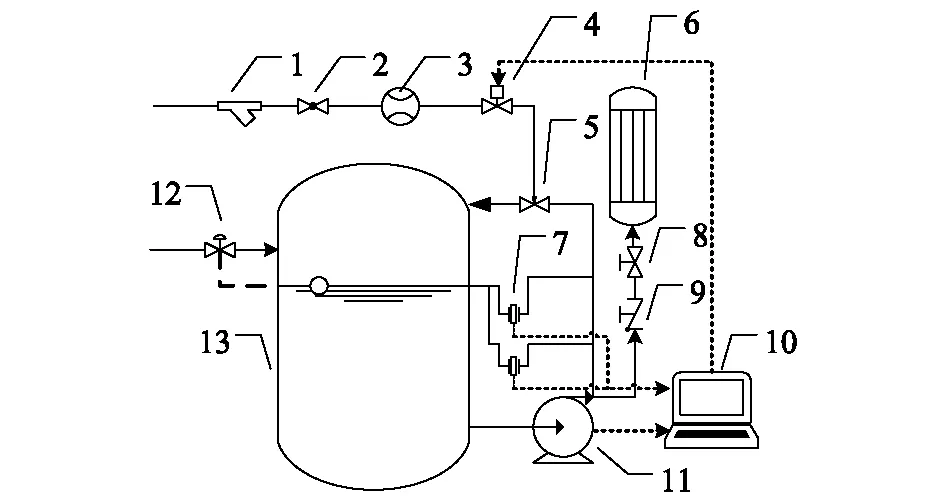
图中标号1为酸液过滤器;标号2为酸液粗调阀;标号3为酸液流量计;标号4为高速电磁阀;标号5为文丘里;标号6为肥液罐;标号7为肥液pH值测量传感器;标号8为灌溉设备的控制阀;标号9为肥液止回阀;标号10为上位机;标号11为电机泵;标号12为隔膜阀;标号13为肥液混合罐。图1 肥液pH值控制系统结构件框图Fig.1 Schematic diagram of pH control system
1.2 pH值控制动态数学模型
pH调节过程可视为是强酸和弱碱的混合反应。董全成[3]对pH值中和反应进行了模型描述,该模型由两个方程构成,一个是负责描述pH值变化的动态方程,另外一个是中和滴定的静态pH值方程。
pH值调节过程可以通过公式(1)表示:
(1)
式中Fout=Fn+Fw+u,V为混合肥液的体积;u为酸液从输入口输入的流量;Ca为酸液的物料浓度;Fn为水肥肥液的流量;Cn水肥肥液的浓度;Fw为灌溉水通过管路的流量;Cw为灌溉水对应的浓度;x1和x2分别为输出管路中对应酸浓度和减浓度。
滴定的pH动态方程通过式(2)表示:
(2)
式中pH=-lg[H+];PKb=-lgKb;Kb为弱碱液电离参数;
1.3 控制系统设计
施肥营养液pH值调节系统的硬件设计框图如图2所示。整个系统的核心微控制器采用ST意法半导体公司的32位STM32F104单片机。pH传感器负责采集混合罐中物料pH值,经过滤波处理后通过AD接口传送至微控制器STM32F104。温度传感器负责记录当前混合罐内温度,这样可以根据当前温度值对pH值进行温度补偿。当pH值与肥液配方中的目标值相差较大时,微控制器可以通过PWM信号控制快速电磁阀来调节酸液流入混合罐中的速度。人机交互界面负责显示当前混合罐中肥液的pH值、酸液流速、施肥泵开启情况、温度等信息,同时管理员可以通过人机交互界面修改肥液配方中pH目标值。

图2 变量施肥控制系统框图Fig.2 Architecture of variable rate fertilization control system
pH传感器主要是采用美国Global Water公司的WQ201,通过检测肥液中氢离子浓度,并转换为电信号。pH传感器传输的信号经过传感器滤波电路进行噪声抑制,并将信号进行转换使之符合微控制器AD接口的电压范围。滤波电路如图3所示。

图3 传感器滤波电路设计Fig.3 Circuit of sensor filter
控制酸液流速的快速电磁阀需要微控制器PWM信号来驱动,但是由于快速电磁阀需要2A左右的驱动电流,微控制器自身电流输出为10 mA左右,因此需要在快速电磁阀和单片机之间增加电流驱动电路,电路设计如图4所示。驱动芯片采用UL2102,该芯片能够保证足够的驱动电压和电流,且开关频率达到10 MHz,满足流速调节的需求。
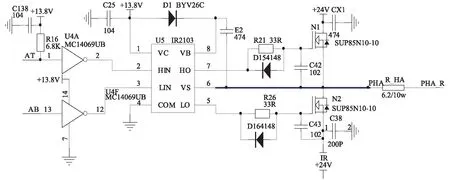
图4 快速电磁阀驱动电路设计Fig.4 Design of drive circuit for high-speed solenoid value
2 模糊免疫PID控制原理
2.1 免疫算法原理
免疫算法来源于人体免疫原理,人体免疫是针对于外部生物性干扰而进行的防御措施。人体内的抗体和抗原相结合,从而使得抗体产生一系列的反应进而能够通过吞噬作用消灭抗原。人体的整个免疫系统是由抗体和淋巴细胞构成的,其中淋巴细胞则由T细胞和B细胞构成。T细胞分为两种,分别是TH和TS细胞,这两种细胞相当于免疫系统中的正反馈环节和负反馈环节。当抗原入侵人体时,人体细胞得到消息并将消息传递给TH和TS细胞。如果抗原较多,免疫系统内TH数量会比TS多,此时B细胞较多。反之,抗原较少,则TS会抑制TH数量,导致TS数量较多,此时B细胞较少。免疫系统会根据B细胞数量产生抗体。
上述免疫规则用数学表达式如下所示: 设第i时刻的人体内抗原数量为φ(i),则TH在i时刻的数量为:
TH(i)=k1φ(i)
(3)
式中,k1为参数,表示正反馈因子。
TS细胞在i时刻的数量为:
TS(i)=k2f[S(i),△S(i)]φ(i)
(4)
式中k2为负反馈因子,主要起到抑制的作用。S(i)为当前i时刻B细胞数量;△S(i)为细胞B在i时刻和i-1时刻的差值。f为模型函数,取值范围[0,1]。
细胞B的数量S(i)可以表示为:
S(i)=TH(i)-TS(i)=k1φ(i)-k2f[S(i),△S(i)]φ(i)=k1{1-η[f(S(i),△S(i))]}φ(i) (5)
式中η=k2/k1,表示整个系统的稳定性效果。
2.2 算法控制器架构
本试验使用的模糊免疫PID算法的基础是PID控制,并且结合免疫算法和模糊推理算法。算法结构如图5所示。

图5 模糊免疫PID控制器原理图Fig.5 Schematic diagram of fuzzy immune PID
免疫算法部分的比例参数设为kp1,根据式(5)可得:
kp1=k1{1-η[f(u(i),△u(i))]}
(6)
根据图5所示算法结构可得免疫算法部分的输出量为:
u(k)=kp1e(k)
(7)
如图5所示,将免疫算法和PID算法以及模糊算法相结合可得:
(8)
式中的函数f(·)需要通过模糊算法逼近来实现。根据人体免疫系统原理“当细胞B接收的刺激越大,其抑制能力就相对减弱”,采用模糊算法构造模糊算法规则,其中控制输入量设置为u,输入量的变化量用△u,函数输入量用f(u,△u)表示,P表示正,N为负,Z表示零。模糊规则如下:
(1)如果u是P,同时△u为P,则f(u,△u)为负值;
(2)如果u为P,但△u为N,则f(u,△u)为Z;
(3)如果u为N,同时△u为N,则f(u,△u)为Z;
(4)如果u为N,且△u为N,则f(u,△u)为P;
3 控制效果仿真测试
本试验通过使用Matlab/Simulink软件验证基于模糊免疫PID算法的pH值调节算法。根据酸碱值中和模型,通过输入开环阶跃信号得到模型的传递函数为:
(9)
仿真测试分别进行了阶跃响应信号输入验证和干扰信号输入验证。
3.1 阶跃信号输入验证
首先使用一阶保持器对模型进行离散化。仿真的采样时间设置为2 s,pH值调节目标值分别设置为6.5和5.5。初始状态时的pH值设置为8.4。每次仿真分别采用PID算法和模糊免疫PID算法进行pH值调节,然后将仿真数据做对比,仿真结果如图6所示。通过对比发现采用PID算法导致超调量远大于模糊免疫PID算法,且模糊免疫PID算法密切跟随目标值。

图6 阶跃信号仿真测试结果Fig.6 Test results of the step signal
3.2 抗干扰仿真测试
首先设置为阶跃输入信号仿真,且将pH值调节的目标值设置为7,在此基础上分别对系统输出口加入确定性干扰信号以及随机信号以此测试算法的鲁棒性。从数据对比可以看出模糊免疫PID算法抗干扰性能优于PID(图7)。
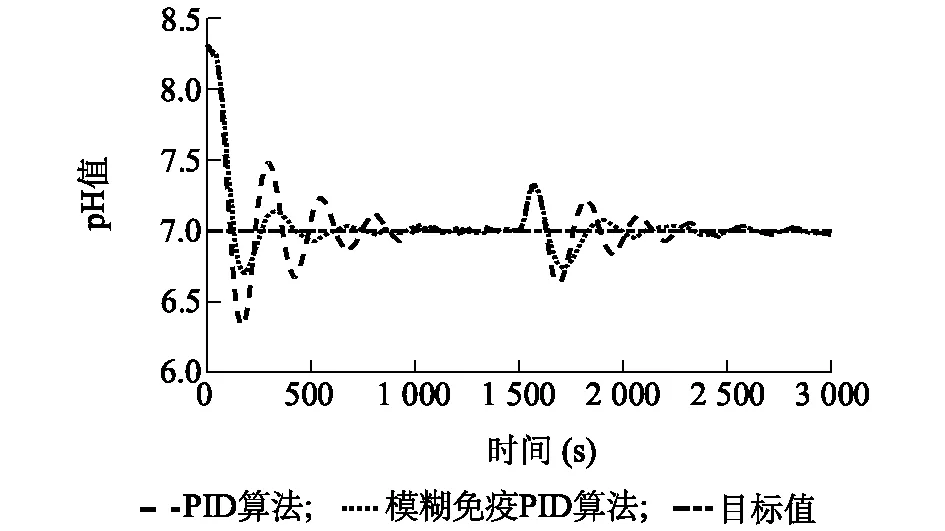
图7 抗干扰仿真测试结果Fig.7 Test results of the anti-interference ability
4 肥液pH值调节试验结果
pH值调节试验平台如图8所示。储水罐中为灌溉存水,通过测试确定pH值为7.9。在酸液罐中存放酸液物料稀盐酸,浓度大概为0.2 mol/L。调节装置中的补水设备负责保持混合罐中的液位保持恒定。肥液pH值调节系统输出肥液流量为12 m3/h,酸液通道上的文丘里标准流量为115 L/h。控制酸液的电磁阀延迟时间为110 ms。pH传感器测量精度为0.005。系统所用流量计为TI公司的EM4000型,输出信号为标准的 4~20 mA,该流量计主要是为了测量系统的瞬时流量。管道上的电磁阀为了控制田间施肥管路。

图中标号1表示蓄水罐设备;标号2为酸液存储罐;标号3为储水罐;标号4为控制器;标号5为精准施肥管道;标号6为流量传感器;标号7为分水设备。图8 肥液pH值调节平台Fig.8 Physical map of pH regulation control system
4.1 不同目标值调试结果
pH值调节试验进行两组不同目标值试验,目标值分别设置为6.0和5.5,试验数据如图9和图10所示,通过对比发现PID算法调节时pH值波动较大,模糊免疫PID算法调节时pH值波动较小。PID算法调节时超调量远大于模糊免疫PID算法。

图9 目标值为6的调试结果Fig.9 Debugging results for target value 6

图10 目标值为5.5的数据曲线Fig.10 Debugging results for target value 5.5
4.2 不同流量下的调试结果
酸液分别设置为4 m3/h和7 m3/h下进行PID算法和模糊免疫PID算法调试结果比较。试验结果(图11、图12、表1、表2)显示模糊免疫PID算法在最大误差方面、平均绝对误差方面以及均方根误差方面均优于PID算法。误差率减小了60.00%~69.77%,平均绝对误差减小了83.33%~87.50%,均方根减小了83.33%~88.89%。表明模糊免疫PID算法可以满足pH值调节精度要求,且抗干扰能力较强。

图11 酸液流量为4 m3/h时的调试结果Fig.11 Debugging results for flow rate 4 m3/h

图12 酸液流量为7 m3/h时的调试结果Fig.12 Debugging results for flow rate 7 m3/h
表1酸液流量为4m3/h时不同控制算法调节pH值的误差
Table1Erroranalysisofdebuggingresultsforflowrate4m3/h

控制算法最大误差平均绝对误差均方根误差PID算法0.400.060.06模糊免疫PID算法0.160.010.01
表2酸液流量为7m3/h时不同控制算法调节pH值的误差
Table2Erroranalysisofdebuggingresultsforflowrate7m3/h

控制算法最大误差平均绝对误差均方根误差PID算法0.430.080.09模糊免疫PID算法0.130.010.01
5 结 论
针对精准农业生产中营养液需要调节pH值,pH值调节具有非线性、滞后性的特征,本试验首先针对pH值调节过程建立了动态数学模型,以该模型为基础设计了模糊免疫PID控制器。分别通过Matlab软件仿真和使用肥液pH值调节平台进行试验,验证了本试验所提出的模糊免疫PID算法和传统的PID算法的性能,试验结果表明本试验提出的模糊免疫PID算法在超调量、平方根误差等方面均优于传统的PID算法。
参考文献:
[1] NIU Y , ZHANG K. Development of fertigation control system based on embedded platform and self-adaptive control strategy:2nd International Conference on Electrical, Computer Engineering and Electronics [C]. Istanbul:SRPioneers,2015:1594-1600.
[3] 董全成,冯显英. 基于自适应模糊免疫PID的轧花自动控制系统[J].农业工程学报,2013,29(23):30-37.
[4] 景兴红,王泽芳,宋乐鹏.自适应PID与PI符合控制变量施肥系统研究[J].农机化研究,2015(10):29-33.
[5] 何青海,孙宜田,李青龙,等.基于模糊控制的水肥药一体化系统研究[J].农机化研究,2015(8):203-207.
[6] 李加念,洪添胜,冯瑞珏,等.基于模糊控制的肥液自动混合装置设计与实验[J].农业工程学报,2013,29(16):22-30.
[7] 魏正英,葛令行,赵万华,等.灌溉施肥自动控制系统的研究与开发[J].西安交通大学学报,2008,42(3):247-349.
猜你喜欢
大庆石油地质与开发(2023年1期)2023-02-13
排灌机械工程学报(2022年11期)2022-11-26
节水灌溉(2021年9期)2021-10-13
灌溉排水学报(2021年1期)2021-01-27
钻井液与完井液(2019年2期)2019-05-24
节水灌溉(2017年10期)2017-03-21
汕头大学学报(自然科学版)(2017年1期)2017-03-03
石油化工应用(2015年9期)2015-08-10
唐山学院学报(2015年6期)2015-02-22
天津师范大学学报(自然科学版)(2014年2期)2014-11-01