重复性项目调度模型的时差分析
2018-07-13 02:02张立辉黄元生乞建勋
中国管理科学 2018年6期
张立辉,邹 鑫,黄元生,乞建勋
(1.华北电力大学经济与管理学院,北京 102206;2.华北电力大学经济管理系,河北 保定 071003)
1 引言
时差(Float)是CPM (Critical Path Method)网络中的一个时间尺度概念,它表示在不推迟总工期条件下工序的工期或开始时间可变化的量。常见的时差类型包括总时差、自由时差和安全时差。时差分析旨在区分关键和非关键工序,其中关键工序必须严格按照计划方案执行,而非关键工序的开始时间和工期能够在时差允许的范围内调整,否则将影响项目的总工期。利用时差的这一性质,众多学者展开了对CPM网络特性的研究。例如,Elmaghraby结合时差和工序路线分析了工序的关键性和敏感性[1]。李星梅等依据大型网络的构建过程提出简化组合模型,将多层次复杂网络转化为多个单层次简单网络,并据此提出了分层网络时差的计算公式[2]。乞建勋等提出了反映总时差与路长关系的总时差定理,并在此基础上设计了构造等效子网络的快速方法[3]。时差分析的另一个重要应用是在工程延误发生时,为业主和承包商的索赔提供计算依据[4]。此外,在某些求解资源均衡问题的启发式算法中,时差也作为确定非关键工序调整顺序的标准[5]。总的来说,CPM中的时差分析研究已相当成熟,其在项目计划与调度的多个领域均有成功的应用。
重复性项目(Repetitive Projects)是一类特殊的项目,它的施工场所可划分为若干独立的单元,并且所有工序需要在多个单元上重复执行,例如高层建筑、高速公路和管道工程等[6]。尽管CPM被认为是最有效的项目调度工具之一[7],但在重复性项目中却存在诸多不足[8-9],如不能保证工序在单元间的连续性,不能表示多种类型的优先关系等。这也导致基于CPM的时差分析方法无法直接应用于重复性项目。基于此,部分学者提出了新的重复性项目调度方法,如Repetitive Scheduling Method(RSM)[10-11],Line of Balance(LOB)[12]和Linear Scheduling Models(LSM)[13-14]等。这些方法均采用“时间-距离”的二维图表示项目的进展,故本文将它们统称为RSM,并以纵坐标表示时间,横坐标表示工程阶段。为了减少间断时间并最大化学习效应,在利用RSM做计划时通常要求保持工作连续性,即工序在单元间不存在间断。
在RSM中,一个工序可能只有部分单元位于关键路线上,此时时差分析就需要确定每个工序非关键部分的时差大小。Harmelink[15]提出了效率时差(Rate Float, RF)的概念,用于衡量在不影响总工期条件下,工序非关键部分的工作效率能够改变的量。但是,该研究假设任意工序非关键部分的工期必须相同。对于某一工序在所有单元上的子工序均为非关键的情形,Ammar[16]提出的时间时差(Time Float, TF)表示在不推迟总工期条件下,该工序在所有单元上的开始时间可以被整体推迟的最大量。以上研究属于图示分析法,计算效率不高。基于Lucko[17]提出的通过奇异函数描述工序的方法,Lucko和Orozco[18]提出了时差计算的数值化模型。但是该模型涉及到的公式较为复杂,方法步骤繁琐,不利于实践中的应用推广。此外,RF和TF要求工序在所有单元间必须连续施工。当这一条件不被满足时,RF和TF就无法正确估计。工序间断是重复性项目实施中的常见情形,指在一个工序的某单元完成后出现停工的现象。在实际工程中,工序间断常发生于极端天气、资源供应不足和工人罢工等事件。因此,为了合理有效地控制进度,我们有必要在考虑工序间断的情况下对现有的时差分析方法做进一步推广。
综上所述,本文将研究新的RSM时差分析方法;该方法旨在确定不影响总工期条件下,一个子工序的开始时间或工期可变化的最大量。将CPM网络中的时差概念引入到RSM中,本文将进一步提出适用于重复性项目的新的时差概念体系,以及对应时差的数值计算方法。
2 基本假设与时差分类
图1是一个简单RSM示例,其中粗线表示关键路线,阴影表示约束。关键路线由关键子工序和关键约束构成。关键约束连接两个不同工序的关键部分,所形成的连接点称为关键点。本文根据非关键子工序与关键点的相对位置将非关键子工序分为两类,包括位于关键点之后的A型子工序,以及位于关键点之前的B型子工序,A型子工序ai,j在RSM中的计划开始和计划结束时间就为其最早开始和结束时间,即Si,j=ESi,j且Fi,j=EFi,j,并且它的最早和最迟时间参数满足:
LSi,j-ESi,j≤LFi,j-EFi,j
(1)
对于B型子工序ai,j而言, 它在RSM中的计划开始和计划结束时间则分别等于LSi,j和LFi,j,同时满足:
LSi,j-ESi,j≥LFi,j-EFi,j
(2)
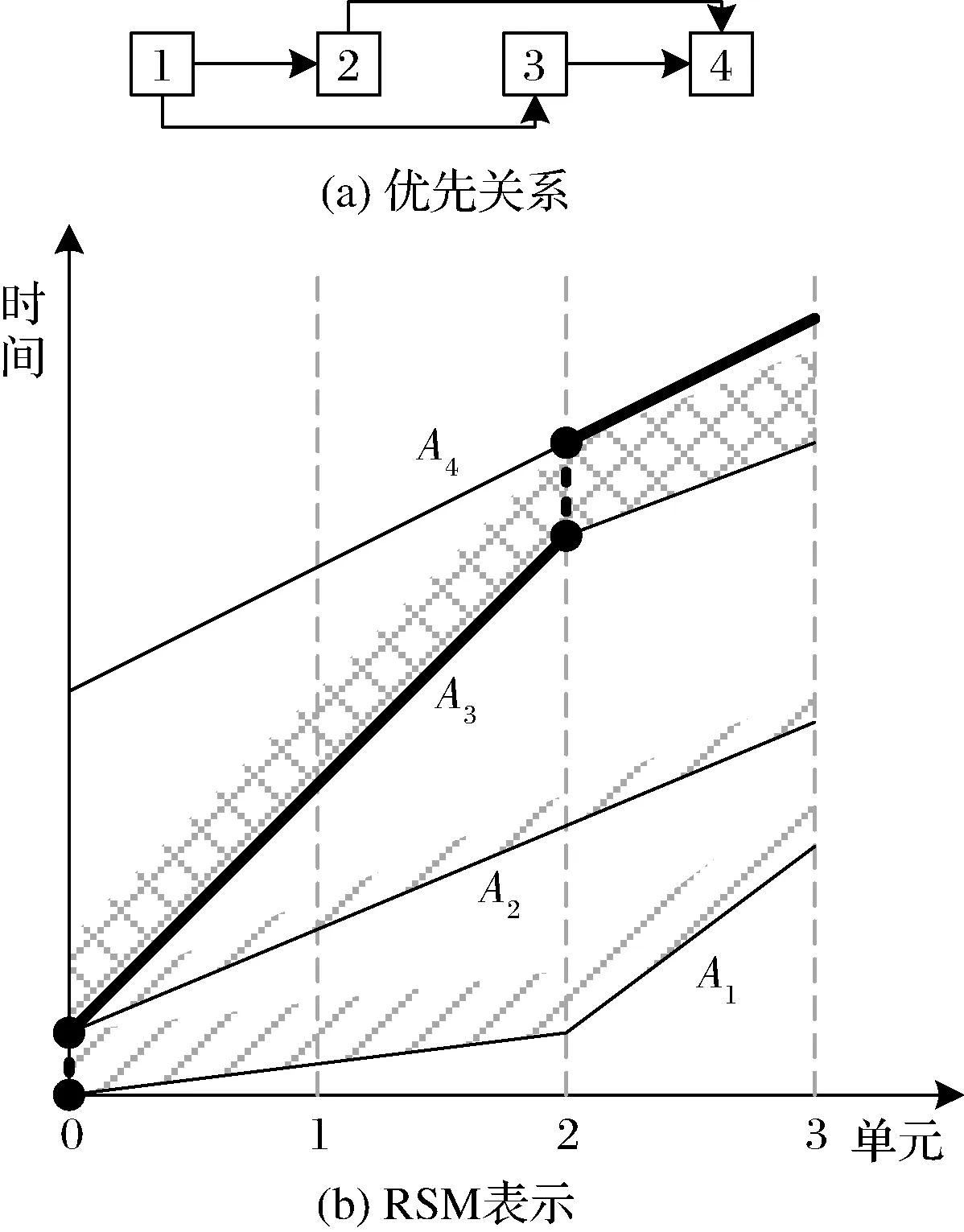
图1 重复性项目的RSM表示
CPM中常见的时差类型包括总时差、自由时差和安全时差。这种时差分类方式已被计划人员和学者广泛接受。按照使用方式的不同,每一种时差又可细分为两类,包括通过延长工期使用时差的延长时差,以及通过推迟(提前)开始时间消耗时差的移动时差。不同类型的时差有着相应的应用领域,如时间费用权衡问题需要计算每个工序最优的工期,从而在给定截止日期条件下最小化总费用。该问题可看作是确定每个工序延长时差的最优使用量。又如在资源均衡问题中,需要在工序工期和项目总工期不变条件下确定所有工序最优的开始时间,即计算其移动时差的最优使用量。在CPM中,任意非关键工序的延长时差必定等于其移动时差。所以CPM没有进一步区分时差的使用方式而仅简单地强调总时差、自由时差和安全时差。但是在RSM中,由于涉及多种类型的时间约束以及距离约束,非关键子工序的延长时差和移动时差就有可能不一致。因此,就需要根据使用方式对时差进行单独计算。
将时差使用方式与经典时差概念相结合,本文定义了如下六个新的RSM时差概念:(1)移动总时差(MTF):不影响总工期前提下,子工序的开始时间可以被推迟或者提前的量;(2)延长总时差(PTF):不影响总工期前提下,子工序的工期可以被延长的量;(3)自由移动时差(FMF):不推迟紧后子工序开始和结束时间条件下,当前子工序的开始时间可以被推迟或提前的量;(4)自由延长时差(FPF):不推迟紧后子工序开始和结束时间条件下,当前子工序的工期可以被延长的量;(5)安全移动时差(SMF):不影响紧前子工序最晚开始和最晚结束时间以及总工期条件下,当前子工序的开始时间可以被推迟或提前的量;(6)安全延长时差(SPF):不影响紧前子工序最晚开始和最晚结束时间以及总工期条件下,当前子工序的工期可以被延长的量。
3 总时差
3.1 时间参数计算
(3)
(4)
(5)
(6)
3.2 时差计算
3.2.1A型子工序
如图2(a),A型子工序ai,j使用MTF的方式是推迟开始时间,并且其开始时间可以被推迟的最大量等于min {LSi,j-ESi,j,LFi,j-EFi,j}。由式(1)可知LFi,j-LSi,j≥EFi,j-ESi,j对A型子工序恒成立,所以ai,j的MTF为:
(7)

(8)
综上所述,A型子工序ai,j通过组合MTF和PTF的方式可使用的总时差为:
(9)
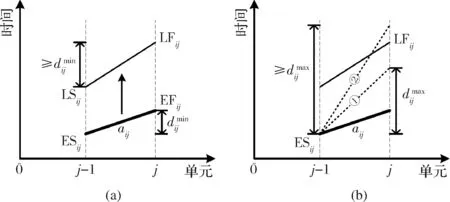
图2 A型工序的MTF和PTF

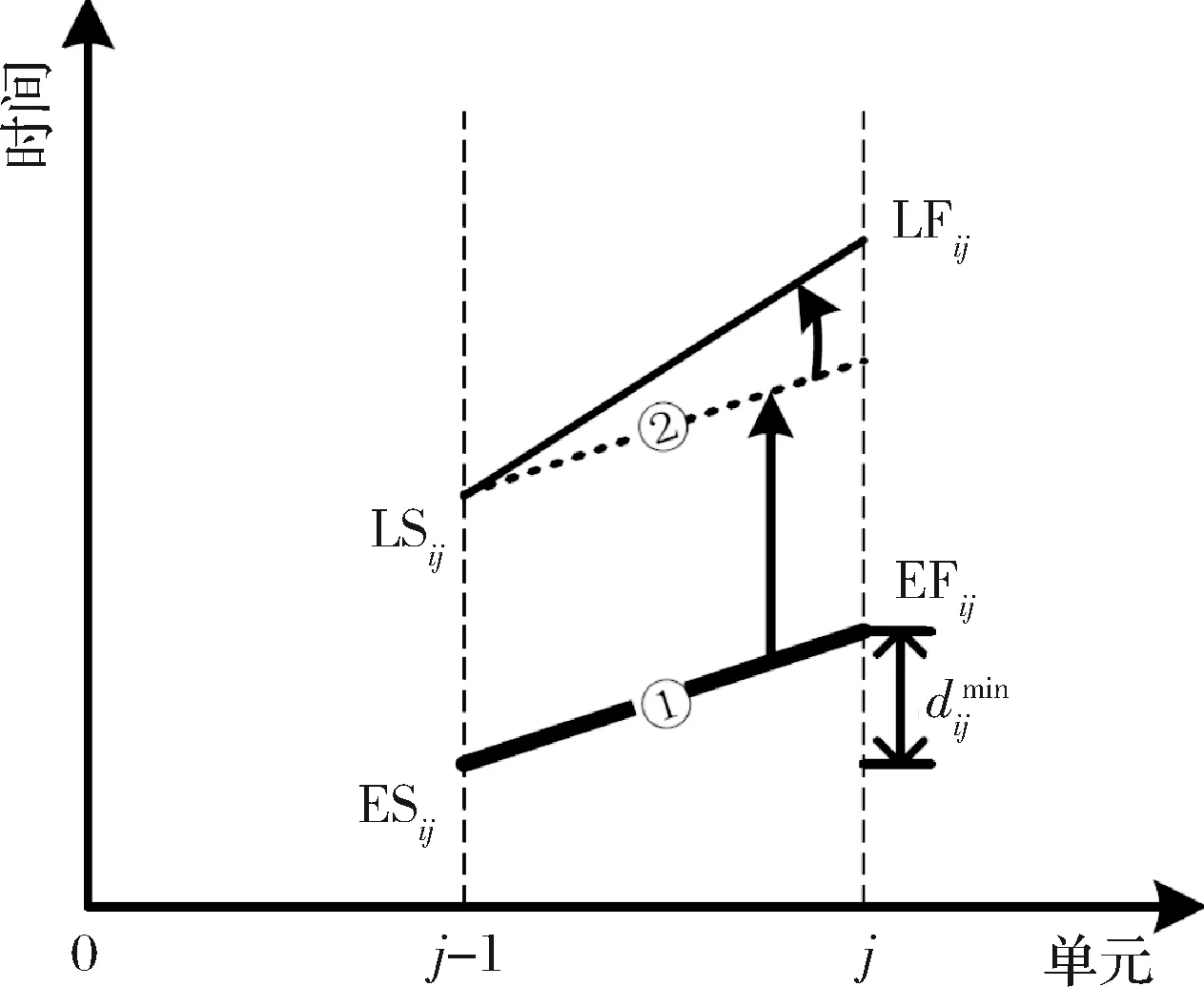
图3 A型工序的TF

3.2.2B型子工序
如图4(a),B型子工序ai,j使用MTF的方式是提前开始时间。由式(2)可知,EFi,j-ESi,j≥LFi,j-LSi,j对B型子工序恒成立,所以ai,j的开始时间可被提前的最大量就等于LFi,j-EFi,j。换句话说,B型子工序ai,j的MTF为:
(10)
(11)
B型子工序ai,j通过组合MTF和PTF的方式可使用的总时差为:
(12)
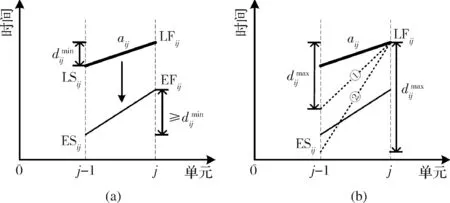
图4 B型工序的MTF和PTF
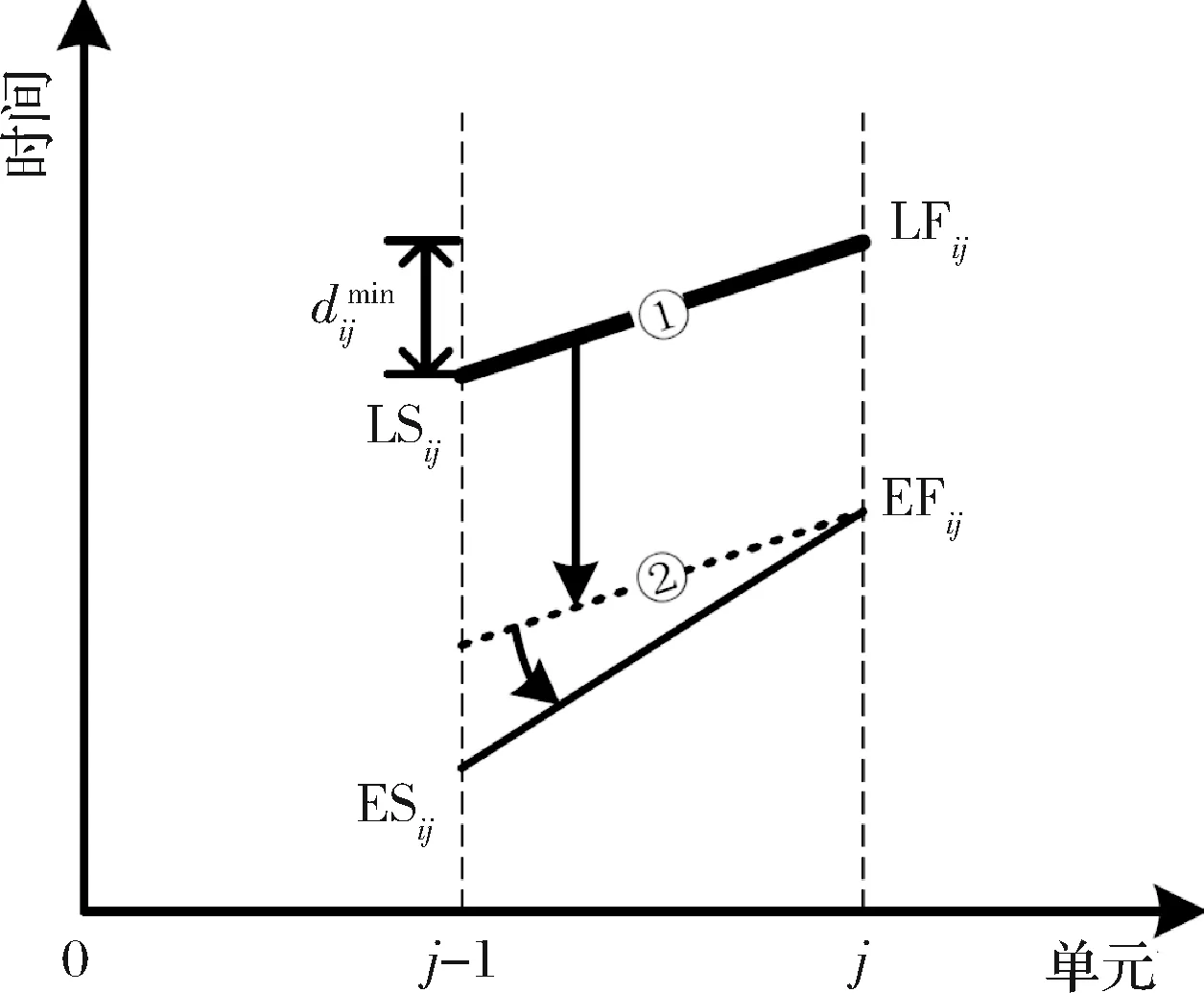
图5 B型工序的TF

3.2.3通用计算公式
联合3.2.1和3.2.2节,对于任意类型的非控制子工序,ai,j它的MTF、PTF、TF,以及MTF和PTF的共用部分(SPi,j)的通用计算公式依次为:
MTFi,j=min{LSi,j-ESi,j,LFi,j-EFi,j}
TFi,j=max{LSi,j-ESi,j,LFi,j-EFi,j}
SPi,j=min{MTFi,j+PTFi,j-TFi,j,0}
4 自由时差
4.1 时间参数计算

(13)
(14)

4.2 时差计算

(15)
(16)
(17)
性质1.对于任意的A型子工序ai,j,若j≠J,则ai,j的FMF、FPF和FF均为零。

5 安全时差
5.1 时间参数计算

(18)
(19)

5.2 时差计算

(20)
(21)
(22)

性质2.对任意的B型子工序ai,j,若j≠1,则ai,j的SMF、SPF和SF均为零。

6 案例分析
考虑一个5km长的天然气管道工程项目,其中每个单元的长度为1km。每个子工序的计划工期和工序间约束关系类型见表2。该项目的RSM表示见图6(a),其中粗线表示关键路线,其长度(即总工期)等于62天。对于非关键子工序,它们所属的类型、工期的上界以及最早和最迟时间参数计算结果见表3。
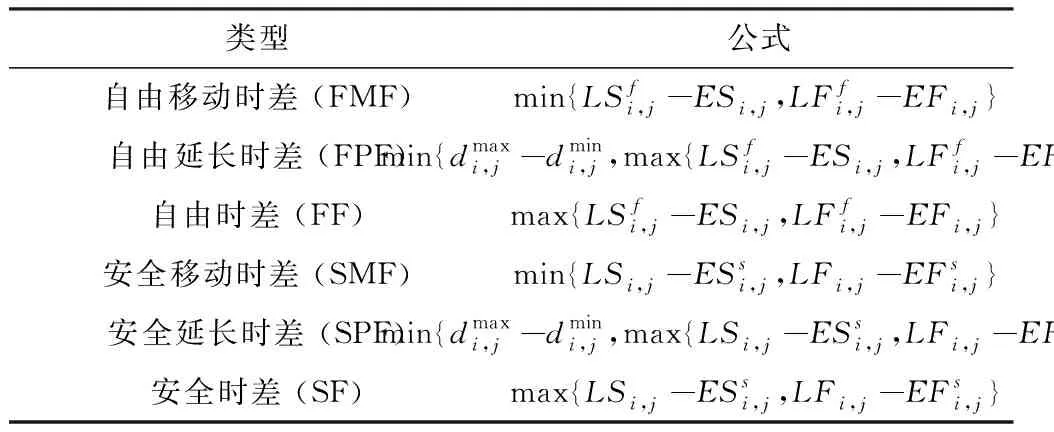
表1 不同类型自由时差与安全时差的通用计算公式
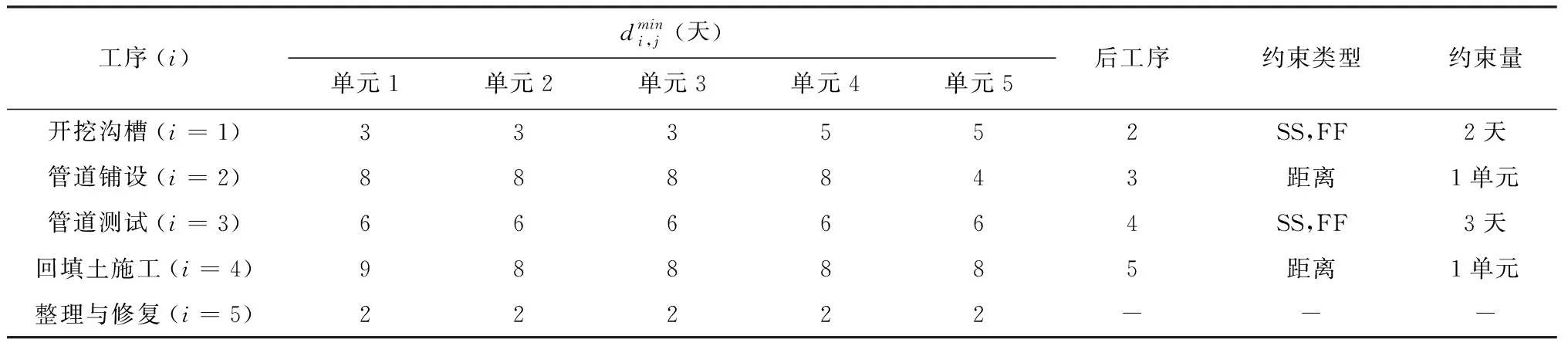
表2 项目工程信息
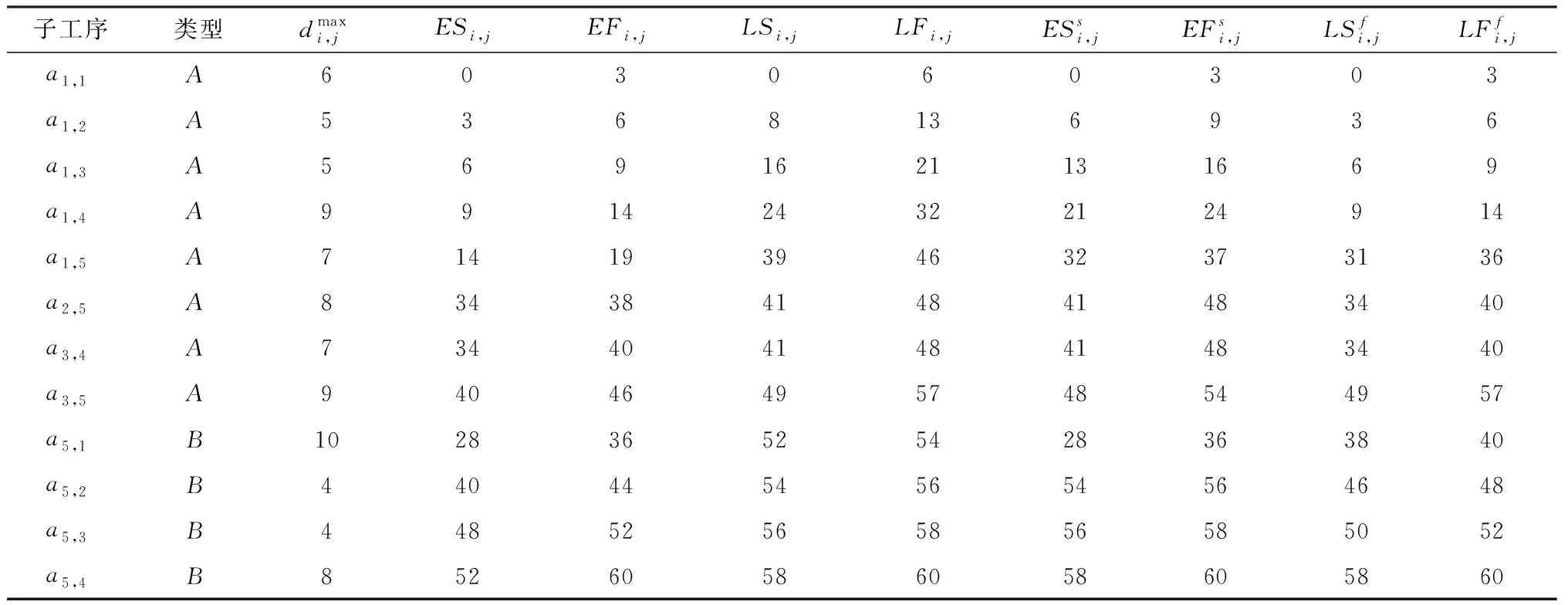
表3 非关键子工序的类型、最长工期和最早与最迟时间参数
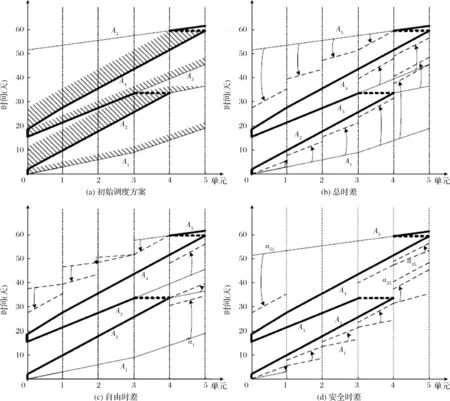
图6 初始调度方案以及子工序不同类型时差的使用
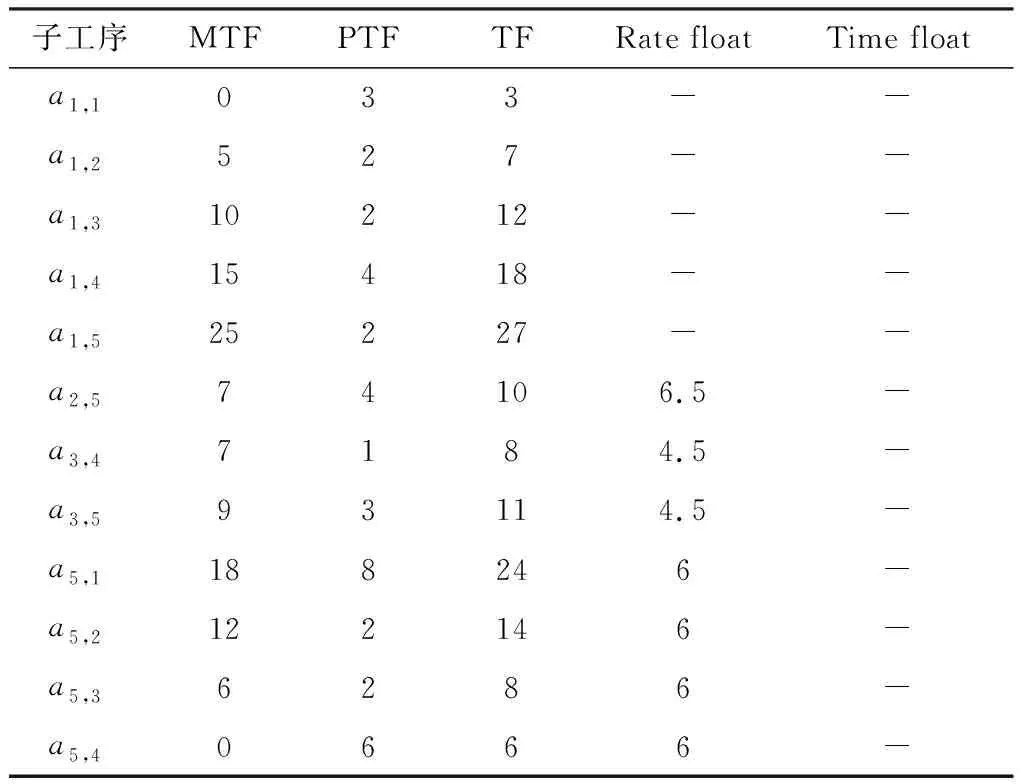
表4 不同算法下非关键工序的时差计算结果
非关键子工序使用FF和SF的图形表示见图46(c)和(d),其中箭头分别指出了非关键子工序在完全使用FF和SF后所处的位置。与性质1和2描述的内容一致,A型子工序除a1,5、a2,5和a3,5外,其余的子工序的FMF、FPF和FF均为零,如图6(c)所示;而B型子工序除a5,1外,其余子工序的SMF、SPF和SF也都为零,如图6(d) 所示。作为比较,已有文献提出的效率时差和时间时差并不具备计算FF和SF的能力。综上所述,本文提出的RSM时差概念是区别于效率时差和时间时差的一类新的时差概念体系。并且本文提出的时差计算方法允许工序间断且初始工期不一致,这扩大了时差可计算的范围,具有更强的普适性。
7 结语
本文在工序可间断条件下,根据非控制子工序使用时差的两种方式定义了新的RSM时差概念体系,包括移动总时差(MTF)、延长总时差(PTF)、自由移动时差(FMF)、自由延长时差(FPF)、安全移动时差(SMF)和安全延长时差(SPF)。在此基础上,本文提出了时间参数和时差计算的公式,为项目管理者能够更好地进行进度管理提供了可能。时差分析除了拥有揭示工序关键性的能力外,还能辅助许多项目调度问题解决方案的设计,例如时间费用权衡问题和资源均衡问题等。在未来的研究中,我们将利用移动总时差和延长总时差的概念建立RSM中的资源均衡模型,同时将时差应用于工程索赔分析。
猜你喜欢
昆钢科技(2021年2期)2021-07-22
建材发展导向(2020年23期)2020-11-25
作文·初中版(2019年8期)2019-09-09
大陆桥视野(2016年12期)2016-12-27
中国社区医师(2016年8期)2016-12-20
考试周刊(2016年94期)2016-12-12
小说月刊(2015年5期)2015-04-19
中国科技纵横(2014年22期)2014-12-15
全国新书目(2009年9期)2009-06-10