基于动态矩阵控制的自主移动机器人模型预测控制方法研究
2018-09-08 01:47袁宇鹏张祖伟王登攀
重庆邮电大学学报(自然科学版) 2018年4期
袁宇鹏,胡 杨,李 军,王 浩,张祖伟,杨 靖,王登攀
(1.中电科技集团 重庆声光电有限公司,重庆 401332; 2.中国电子科技集团公司 第二十六研究所,重庆 400060)
0 引 言
移动机器人是机器人大家族的重要组成部分,已服务于人类生活的各个层面,发挥着重要的作用[1],如用于服务领域的家庭服务机器人和医疗辅助机器人,在恶劣和危险环境下代替人类开展各种作业的移动机器人,以及执行各种枯燥乏味等重复性工作的工业机器人[2-3]。
对于自主移动机器人而言,精确的运动转向系统是保障其实现自主移动功能的良好基础[4]。而采用合理有效的控制策略则是实现运动转向系统精确动作的必要前提。因此,这也是当前许多机器人研究学者和工程人员的研究的重心。目前国内外关于机器人运动系统的控制问题的研究也取得了一些卓有成效的结果。陈刚等[5]在驾驶机器人的速度控制中提出了模糊自适应比例-积分-微分(proportion-integral-derivative,PID)控制方法。Park等[6]提出TYPE-2模糊自调节PID控制器方法,对于自治机器人的运动部分进行了有效控制。Ouyang等[7]在机器人系统中提出了一类PD-滑模结合形式的控制策略。进一步,张文君等[8]则在轮式移动机器人的研究中针对其离散数学模型提出一类模糊自适应PID控制方法。
上述控制策略中,均仅考虑的是对于系统输出的跟踪问题,甚少有对于系统控制增量的变化情况进行结合考虑的控制算法。而在实际自主移动机器人的运动转向系统的控制中,系统的转向速度或者移动速度的变化量是存在特定的软约束的。因此,通过结合系统的跟踪响应和控制增量来设计控制器对于自主移动机器人的运动转向系统的控制具有重要的作用。所以,本文针对上述问题提出了一类基于动态矩阵控制的自主移动机器人运动转向系统的预测控制方法,并且针对李冬等建立的机器人运动转向系统模型的连续形式,通过Matlab平台进行了充分的仿真实验,同常规PID控制算法进行了对比实验,分析了模型失配问题对于系统闭环控制性能的影响,并且对移动机器人在环境中的行走性能开展了实验分析。
1 动态矩阵控制算法
以动态矩阵控制算法(dynamics matrix control,DMC)为主的预测控制方法在现代以计算机控制为主流的控制系统中占据着重要的地位[9]。DMC控制通过增量式的方法能够处理带有非最小相位或者纯滞后特性的系统。DMC控制的特点在于将被控对象的阶跃响应离散数学表达作为预测控制的系统模型,能够避免常规的传递函数等模型参数辨识过程,通过采用多步前向预测控制的方式,能够有效地解决时延问题。同时,DMC不仅能够考虑系统输出同参考偏差最小,还考虑了控制变量的增量,所以DMC是一类最优控制的方法。DMC的控制结构包含预测模型、滚动优化和误差校正等。
1.1 预测模型
动态矩阵控制算法中,基于被控对象的阶跃响应特性,通过一组动态系数a1,a2,…,ap来描述系统在不同采样时刻中系统的阶跃响应值,其中,p表示模型的时域长度,ap表示趋近于稳态的响应值。对于线性系统而言,根据其叠加特性和比例特性可以获得k-i(i=1,2,…,k)时刻的输入的系统表达式,即阶跃响应模型,表示为
(1)
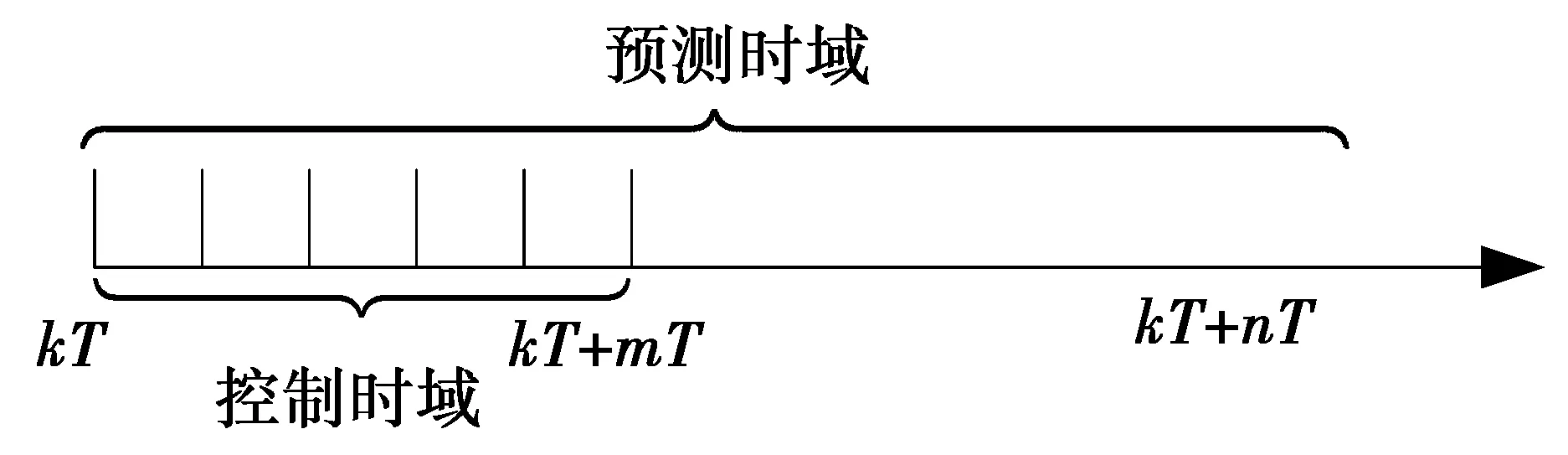
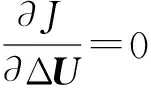
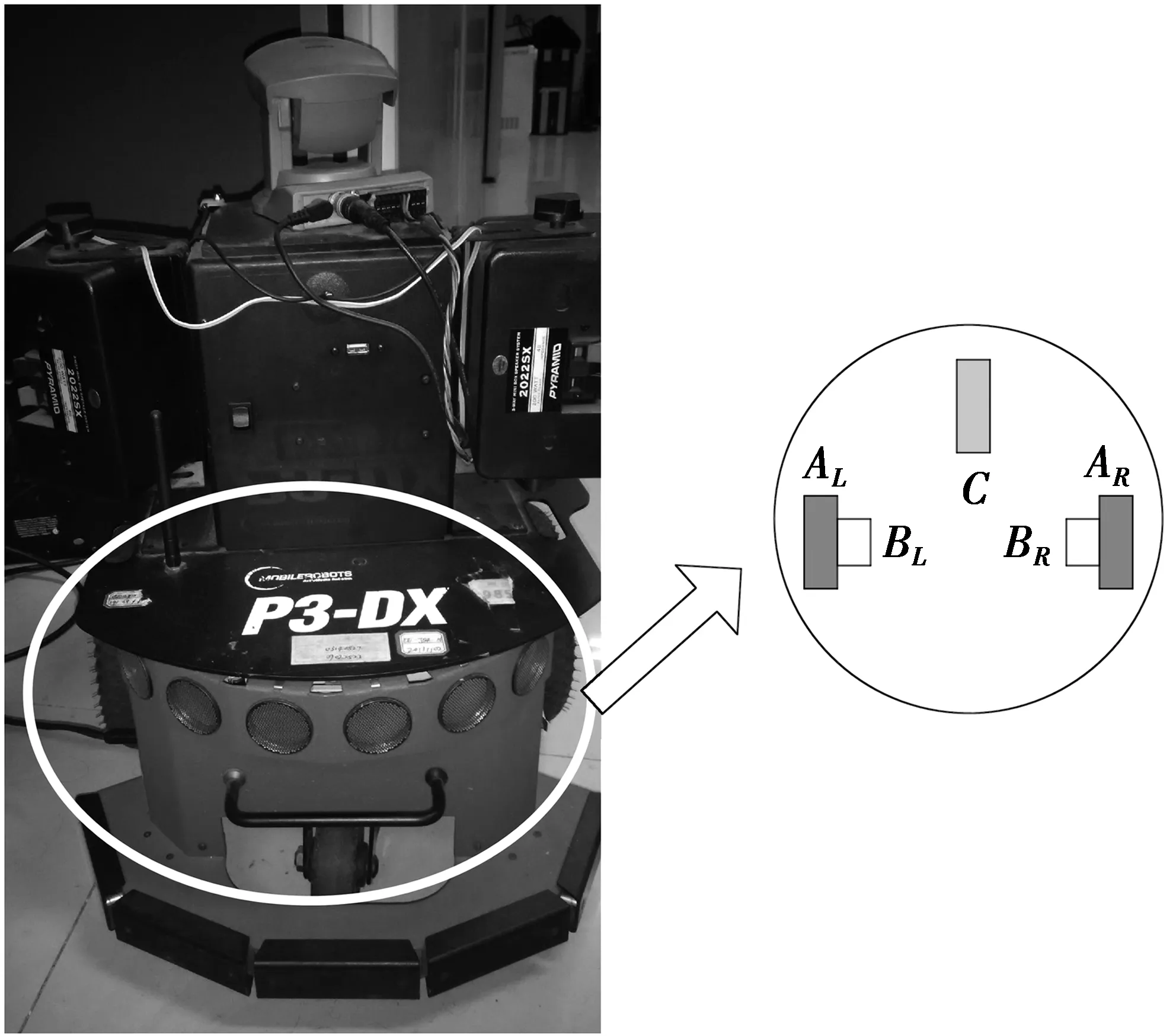
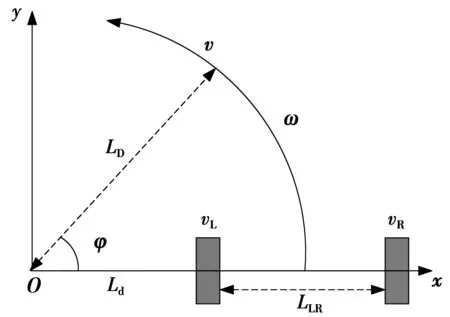
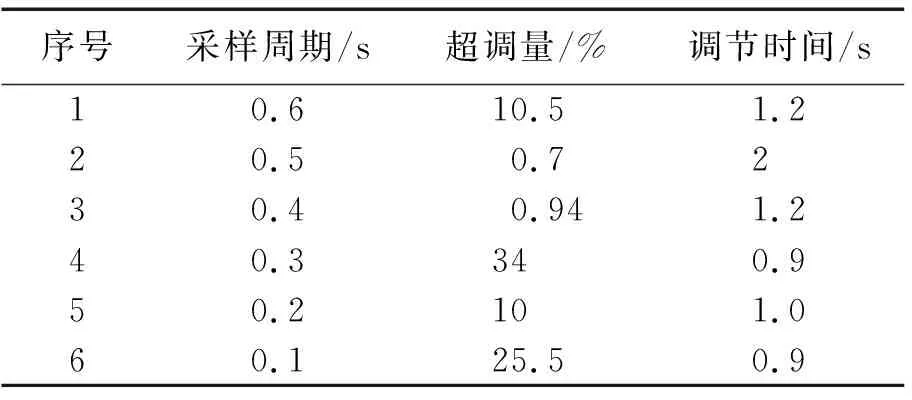
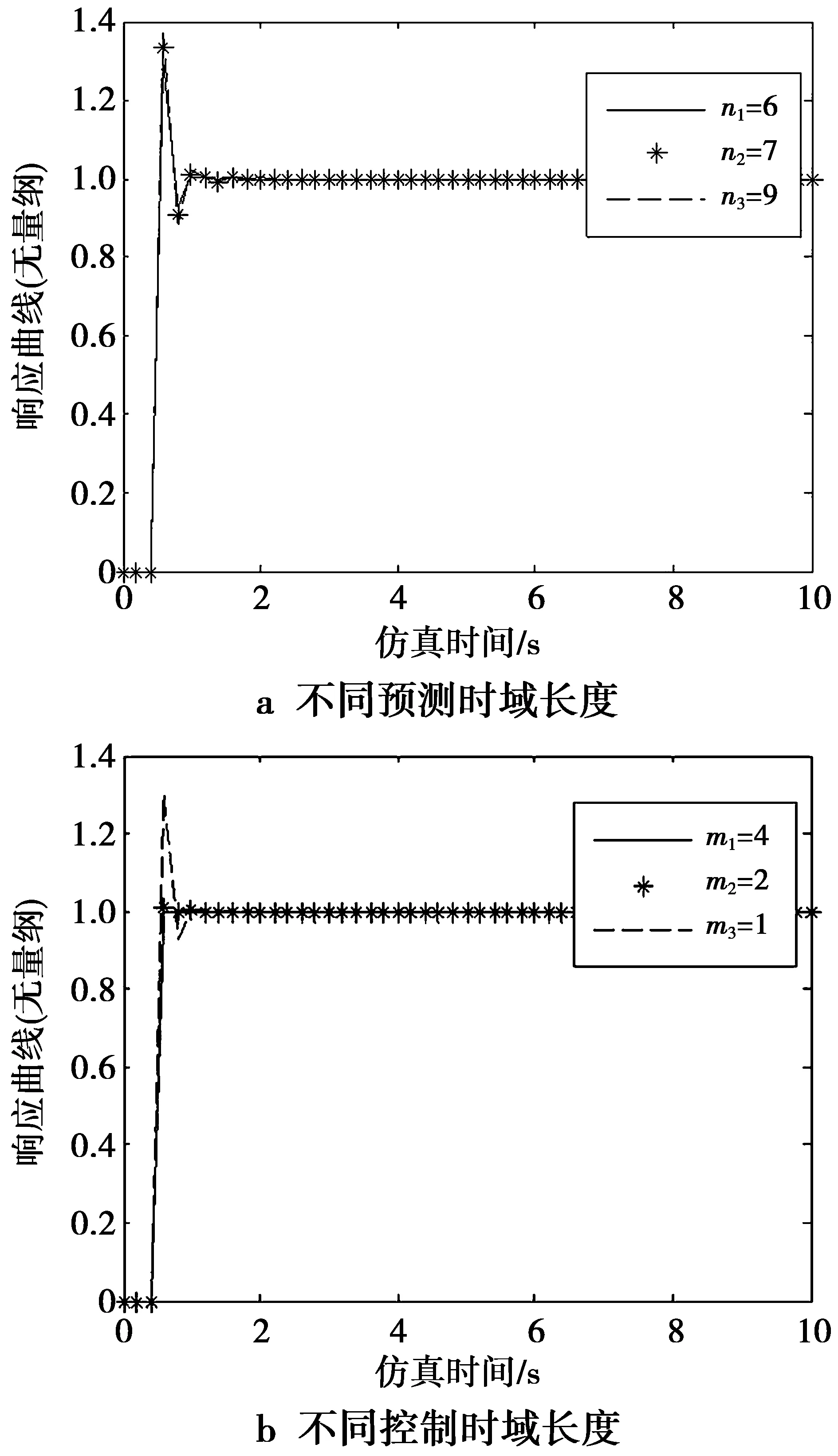
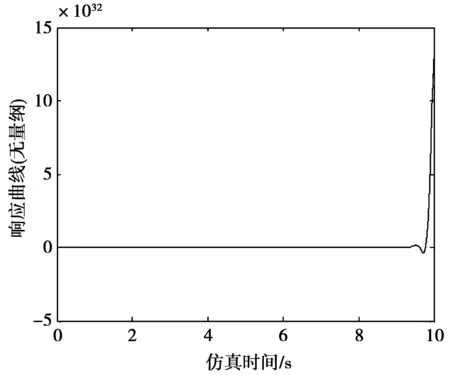
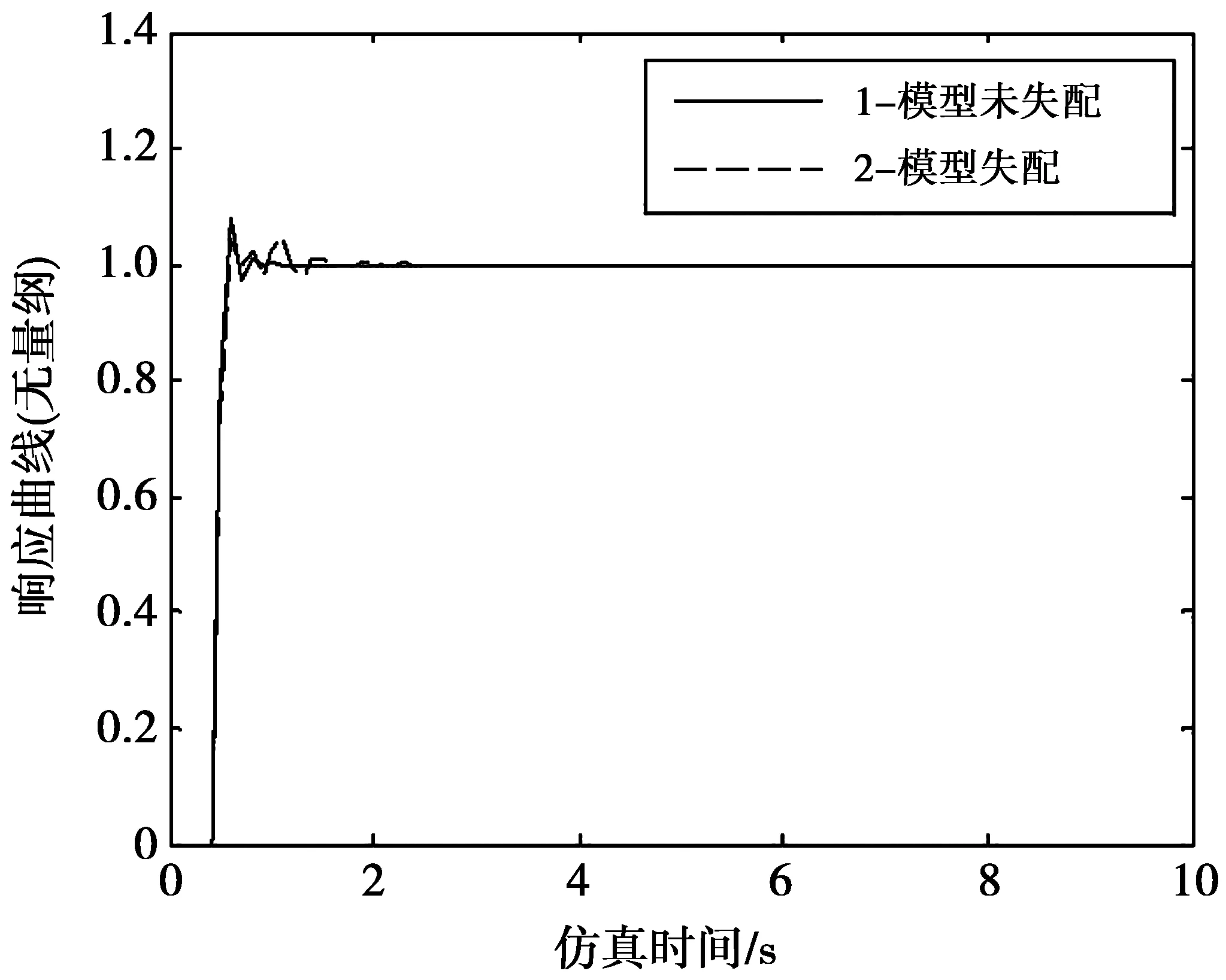
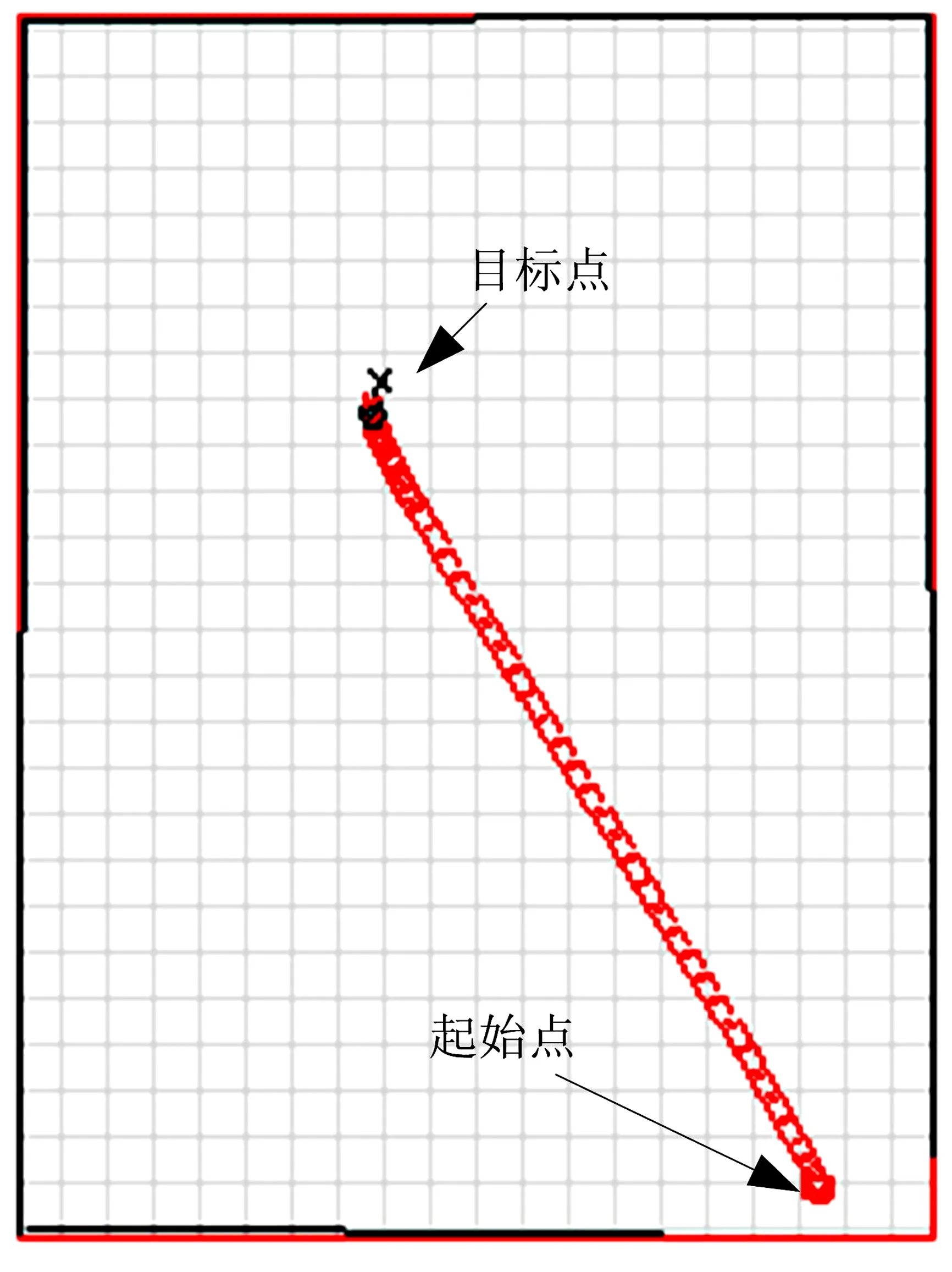
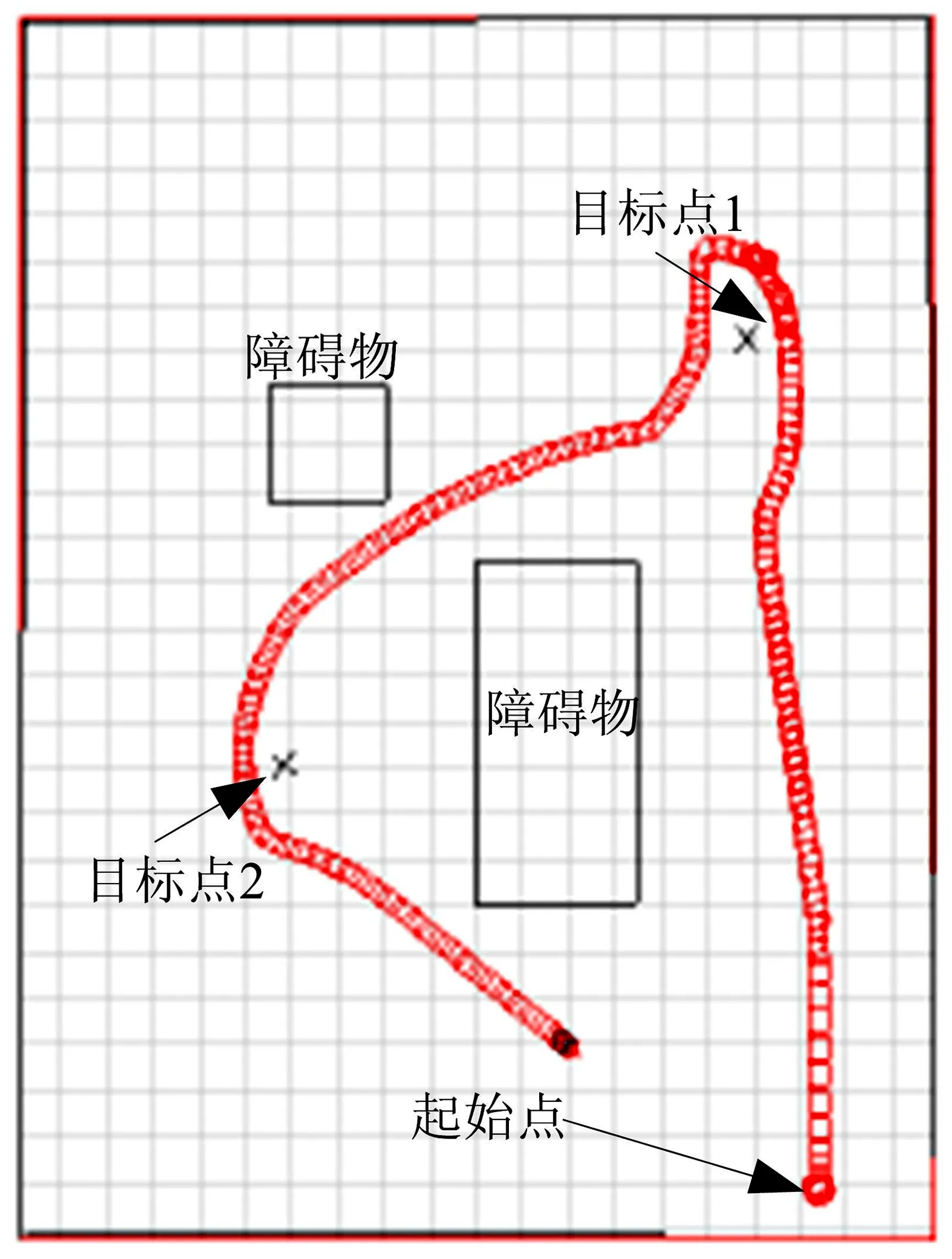
对于(1)式进行形变,可以推导出y(k+j)的n步前向预测(n (2) (2)式中,j=1,2,…,n。 实际控制系统中,过去时刻的系统控制输入值是控制系统的已知量,因此,若将过去时刻的控制输入从对于预测的系统输出的影响中分离出,则系统的n步前向预测形式可改写为 (3) 为降低控制输入计算过程的计算复杂度,把控制输入的增量仅考虑为m维(m (4) DMC控制策略的设计过程的滚动优化方法如图1所示。 图1 DMC的动态优化过程示意图Fig.1 Optimization process of DMC 同时,定义了二次型最优化准则进行实时最优化控制律的求解 (5) (5)式优化准则的矩阵形式可写为 (6) ΔU=(ATA+βI)-1AT(W-Y0) (7) 为了防止控制系统受到弱非线性特性、扰动、模型误差等影响,必须将(7)式进行m时刻的迭代运算的方式改为闭环控制算式 Δu(k)=cT(ATA+βI)-1AT(W-Y0)=dT(W-Y0) (8) 由于每个采样时刻控制系统均只实施第一个控制增量Δu(k),因此,系统的预测形式变为 (9) 定义预测误差函数 (10) 通过采用误差加权的方法修正对未来预测时刻的估计值为 (11) 本文将一类应用于地面环境的自主移动机器人作为研究对象,其主要特点是通过轮式自主移动的方式来完成特定的任务,例如巡查、环境探测和搬运货物等。而该机器人的重要结构部分就是其运动转向系统,如图2所示。精确控制的运动转向系统是保障机器人完成指定功能任务的基础。图2所示的自主移动机器人的运行转向系统包含前轮C、左后轮AL、右后轮AR以及带动AL和AR转动的电机BL和BR。其中,前轮C仅完成平衡和辅助导向的功能,左后轮AL和右后轮AR则是自主移动机器人的驱动来源。 图2 自主移动机器人运动转向系统结构Fig.2 Steering system of mobile robot 自主移动轮式机器人在地面环境工作时,其工作状态可分解为直线运动和旋转运动。通过直线和旋转的时空叠加可表现为直线前进后退、原地转弯和曲线行走等工作状态。自主移动机器人的工作动态示意图如图3所示。 图3 自主移动机器人运动示意图Fig.3 Motions of a mobile robot 对于自主移动机器人建立如下笛卡尔坐标系的运动方程 (12) 通过控制自主移动机器人的直线运动速度和旋转角速度可以方便快捷地完成各类基本的工作状态。令自主移动机器人左后轮和右后轮的半径分别为dL,dR,则左后轮和右后轮的速度值可分别表示为 (13) (14) (13)—(14)式中:ce表示机器人车轮的速度系数;vL为左后轮运动速度;vR为右后轮运动速度;tL和tR分别表示左后轮和右后轮旋转一周的时长。同时,由于自主移动机器人采用的是编码传感器进行编码的方式控制速度,因此,用nL,nR来表示左后轮以及右后轮编码脉冲的数量。 进一步提出自主移动机器人满足刚体运动规律的假设,在考虑车轮的物理约束条件的前提下,机器人车轮速度方程可表示为 vL=Ld×ω (15) vR=(Ld+LLR)×ω (16) (16)式中:Ld表示片面上左后轮和坐标系原点的直线距离;LLR表示平面上左后轮和右后轮的直线距离。 通过上述分析得出,在自主移动机器人的工作过程中,利用对左右后轮的驱动速度的调节来控制机器人整体的直线运动速度以及旋转角速度,进而完成自主移动机器人的原地旋转、曲线行走等功能任务。 为对自主移动机器人的运动状态进行有效控制,需要将上述自主移动机器人的运动方程转换成传递函数形式的机器人模型,李冬等[10]将其转换为连续式传递函数,表示为 (17) (17)式中:传递函数的参数α=0.2,δ=18。 本论文在上述传递函数的基础上进一步考虑运动控制的延时问题,此时,系统的传递函数可表示为 (18) (18)式中,延时因子τ取值为0.7。 为了验证本文提出的动态矩阵控制算法在自主移动机器人系统的动态特性模型的控制性能,基于Matlab平台开展相关仿真实验。本节采用(18)式描述的机器人系统模型作为自主移动机器人的运动控制的依据。为了全面分析动态矩阵控制算法的控制特性,本节开展机器人运动转向系统实验和环境行走实验对控制性能进行验证。 本节的实验包含2个部分:DMC与PID(proportion-integral-derivative)算法对比实验和模型失配对比实验,重点分析两类算法对(18)式描述的机器人系统模型的阶跃响应情况。下面分别对2个实验进行阐述。 实验一PID控制算法是控制领域应用范围最广的控制算法。将DMC同PID控制算法进行对比具有重要的工程意义。因此,本次实验中分别利用DMC算法和PID算法来控制(18)式所示的自主移动机器人转向运动系统,并对于控制性能进行对比。DMC算法参数选择中,采样周期需综合考虑系统对实际对象的逼近程度和计算复杂度。本文分析的机器人最大传动速度为0.7 m/s,通常在室外环境的行走过程中对机器人定位导航的控制精度要求为小于1 m,为满足香农采样定律,采样周期需小于0.7 s。因此,选取多组采样周期进行仿真实验,其中控制时域长度m=1,预测时域长度n=9,实验结果如表1所示。从表1中可得,本实验中优化选取DMC算法的采样周期T=0.2 s。 表1 不同采样周期的仿真结果 同时,研究不同控制时域长度和预测时域长度时的控制性能,如图4所示。其中,图4a为不同预测时域长度的仿真结果(T=0.2 s,m=1);图4b为不同控制时域长度的仿真结果(T=0.2 s,n=6)。由结果可知,T=0.2 s,m=1,n=6时具有最佳的控制性能,即超调量0.87%,调节时间0.6 s,而当系统进入稳态后,系统稳定无稳态误差,控制性能较好,能够保障实际控制系统的控制精度小于1 m。 图4 不同预测时域长度与控制时域长度控制性能分析Fig.4 Simulation results of different prediction and control time domain 优化选取PID控制算法中比例参数kp=11,积分参数ki=0.1,微分参数kd=300。仿真结果如图5所示,而PID控制的仿真结果图4b中系统响应明显呈现发散状态,对于带时延系统函数控制性能较差,无法满足实际移动机器人应用要求。因此,可以得到DMC算法在自主移动机器人运动转向系统中的控制性能明显优于PID控制算法。 图5 PID控制仿真结果Fig.5 Simulation result of PID control strategy 图6 DMC模型失配的对比控制实验结果Fig.6 Simulation result of DMC strategy with unmatched model 本节利用图2中移动机器人(Pioneer,P3-DX)进行环境行走仿真实验。为了对机器人行走进行有效验证,分别对于无障碍和有障碍2类情形进行实验。 实验一将移动机器人放置于室内环境中进行行走实验。移动机器人在运动转向系统的基础上还具备超声避障、激光测距等部件。同时,试验中移动机器人的行走地图采用栅格法进行建立,路径规划利用蒙特卡洛算法。在无障碍情形时,机器人从起始点行走至目标点的路径如图7所示。图7中,蛇形路径表示移动机器人从起始点到目标点过程中的行走路径。由于目标点设置的方式是障碍性的目标点,因此,机器人不能完成到达目标点的中心区域。从图7中可以看出,机器人能够寻求到最优的路径进行近乎直线的行走。 图7 无障碍情形机器人行走路径Fig.7 Walking path of mobile robot without obstacle 实验二在无障碍情形实验的前提下,进一步增加了2个障碍物和目标点来对于移动机器人的行走性能进行实验验证。有障碍情形下移动机器人从起始点到遍历2个目标点再返回过程的路径如图8所示。图8中,蛇形路径区域表示移动机器人的行走区域,2个“X”点表示设置的2个障碍型的目标点;2个矩形区域表示环境中的障碍物。从图8中可以看出,移动机器人能够有效遍历2个目标点,并且能够成功绕开2个障碍物的遮挡。 图8 有障碍情形机器人行走路径Fig.8 Walking path of mobile robot with obstacle 本文针对自主移动机器人的转向运动系统的控制问题,在考虑动态响应系数和控制增量软约束的二次型优化准则的基础上,提出了一类基于动态矩阵控制的预测控制方法。文中首先对动态矩阵控制的设计过程进行了详细的阐述,接着简述了自主移动机器人的转向运动系统的建模问题,最后通过实验对于动态矩阵控制算法的控制性能以及移动机器人在环境中的行走性能进行了详细的仿真分析。仿真结果表明,动态矩阵控制算法的控制性能明显优于常规PID控制器,且该算法具有较强的适应能力和鲁棒性,同时在环境行走实验中进行了验证。未来的研究工作将致力于通过智能算法对于自主移动机器人进行智能建模,从而提高系统的泛化能力。
1.2 滚动优化
1.3 误差校正


2 自主移动机器人系统动态特性模型
3 实验结果及分析
3.1 机器人运动转向系统实验

3.2 环境行走实验
4 总结与展望
猜你喜欢
汽车维护与修理(2022年5期)2022-09-06北京航空航天大学学报(2022年6期)2022-07-02纺织科学研究(2020年1期)2020-05-21小学生学习指导·爆笑校园(2019年6期)2019-09-10制造技术与机床(2017年6期)2018-01-19制造技术与机床(2017年3期)2017-06-23红蜻蜓·低年级(2015年11期)2016-02-02汽车文摘(2015年3期)2015-12-11舰船科学技术(2015年8期)2015-02-27组合机床与自动化加工技术(2014年12期)2014-03-01