基于单目视觉无人机避障系统的算法研究∗
2018-09-28 02:30史骏
计算机与数字工程 2018年9期
史 骏
(西安铁路职业技术学院 西安 710026)
1 引言
自2001年以来美国的空中作战中心(ACC)发展新世纪空战的概念,无人机(UAV)在未来机器人概念中扮演一个主要角色,它能够进行监测、空中战术和闪电战作战任务[1]。1996年美国研制的X-36是第一个具有战场使用的原型机[2]。无人机具有体积小、成本低、便于携带、机动性好、安全性高、受地域环境限制小等优点[3],而随着无人机承载的任务越来越多样化,使用环境多样化和无人机飞行速度的提升,这也导致对无人机成功避免障碍物的要求不断增加[4]。在这一发展趋势下,要求无人机在探测到在保证性能的条件下必须实现对环境的兼容。对于这个要求,目前通行解决方案有两种,要么采用卫星制导技术,提前探测飞行环境[5];要么在无人机上加装摄像探头搜索周围环境,导致技术难度增加且损失过多性能[6]。无论单一使用哪种方法都不能很好地解决这一无人机飞行需求问题。因此有必要找到一种能够较好地兼顾作战环境以及快速调整无人机飞行状态的算法。
本研究将以单目视觉为基础,结合改进型花授粉算法(IFPA)对无人机探索到的飞行环境进行避障处理。首先对无人机避障环境进行建模选取最优避免障碍物的路径坐标体系,其次,在建立单目视觉条件下对障碍物威胁点进行边缘检测,获得边缘轮廓信息,然后利用椭圆的集合性质来进行有效的弧线分割,最后,利用动态变换概率策略(DSPS)改进花授粉算法(IFPA)以分辨单目视觉图像中障碍物。
2 无人机避障的环境建模
2.1 数学模型
无人机路径规划的目标是设计一个从起点到目标点的最优或次优的路线[7]。优化的路线在战场中有能力避免威胁和适用战场作战的长短。首先,路线规划问题应该转换为一维函数优化问题,如图1所示。

图1 二维空间坐标转换关系
图1中,由原坐标系OXY转化为的新坐标系O'X'Y'。水平轴是从起始点到目标点的连接线路。两种坐标系统转换表达式如下[8]:

2.2 性能评估
无人机路径的性能指标主要包括威胁成本Jt和燃料成本 Jf,评估可以遵循以下公式[10~11]:

其中,l表示生成的路径长度,L表示生成的路径总长度,wt和wf分别代表与当前路径和生成路径长度密切相关的每个线段上的威胁成本和燃料成本单价。
为了简化计算,并采用更有效的近似精确解。在这项工作中,每个路径段离散成五段,同时威胁成本在路径长度上的计算随需应变。则模型图2所示[12]。

图2 无人机威胁成本模型
如果威胁点的距离不超过每个子段威胁点半径距离,则威胁成本是给定的表达式如下[13]:

其中,Nt代表威胁地区的数量,Li表示第i段路径的长度,d0.1,i,k表示第 i个威胁点与第 k 个威胁点的距离的1 10,tk表示第k个威胁点的威胁等级。假设无人机的速度是恒定常量,燃料成本Jf由路径的总长度构成。沿着轨迹运行的总成本由威胁成本和燃料成本加权和组成,总成本公式如下:

其中,k值组成的向量决定着各种组件成本相对总成本的函数,无人机设计师灵活地处理威胁与燃料消耗之间的关系。k值的取值在0~1之间。
3 单目视觉图像分析
3.1 边缘与弧段检测
本研究利用单目视觉方式执行无人机的避障,在单目视觉中,弧段的正确提取是解决问题的关键。为了减少执行时间,本研究以弧段为对象代替单个像素点来进行椭圆参数计算,通过边缘检测、弧线分割等处理工作,完成无人机飞行过程中获取图像中弧段的提取。为了便于对障碍物的检测,对提取到的弧段进行分组,弧段分组的方法进行了改进,把可能属于同一个椭圆的弧段分为一组,根据文中的约束条件排除掉不符合要求的弧段组合,然后对满足条件的弧段用直接最小二乘法进行椭圆拟合,检测出原图像中存在的椭圆。
图像中的弧线是以边缘点的形式存在的,因此首先要做的工作是边缘检测。边缘是图像中灰度值发生变化的位置,由于图像容易受到噪声点等因素的影响,因此,首先对图像进行Gaussian平滑滤波[14],然后利用自适应阈值Canny边缘检测得到边界轮廓,它能减少噪声的响应,在正确的位置检测到边缘,并且能限制单个边缘点对于亮度变化的定位。从而得到边缘点集合,对边界轮廓像素进行编码,得到一系列边界链码并舍弃小于15个像素点的边界轮廓。
实际情况下,由于原图像场景往往比较复杂,会出现多种对象相交或者部分遮挡的情况,边缘检测后获得的障碍物不一定都是满足构成椭圆的弧段,因此,要进一步排除掉一些不足以描述一个椭圆特性的弧段。对于弧段来说,是具有凹凸性的。通过弧段划分其所在的最小边界矩形的两个区域的面积,如图3所示,来判断此弧段是否符合要求,当弧段的下部区域的面积S1大于上部区域S2时,认为此弧段是凸性的,反之,则认为是凹性的。若两区域面积相等,则此弧段是没有意义的,因此弃掉此弧。由于检测出来的弧段有很多是相交,对于这种情况,若最小边界矩形的短边小于已设定阈值TL,则将此弧段舍弃。

图3 弧段的凹凸性分类
3.2 弧段分组与椭圆拟合
给定两条相邻的弧段 Arci和 Arcj,如图4所示,这两个弧段用首尾端点组合分别表示为和。弧段Arci和Arcj各端点连线的最小距离 Di,j表示为[15]


若 满 足 Di,j<Dmax且 △G<Gmax,则 Arci和Arcj为同一个椭圆的弧组。

图4 相邻弧段的组合
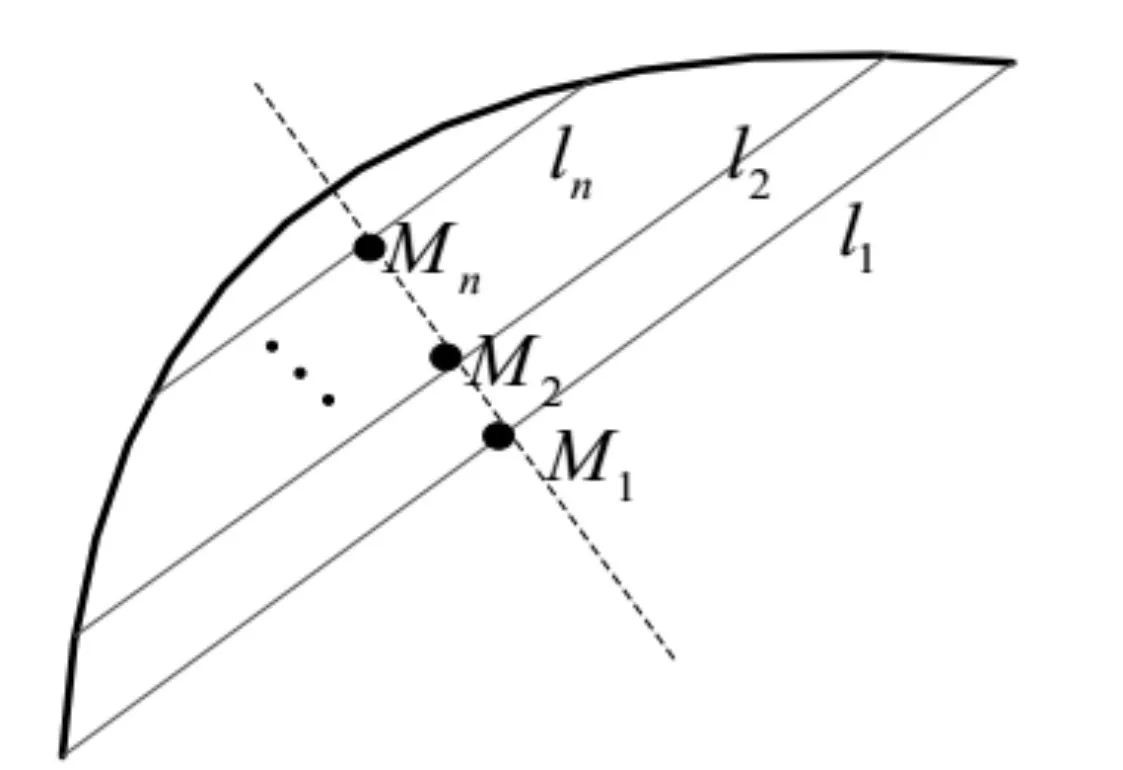
图5 平行弦的中心线拟合
由于存在一些弧段是相交的,把相邻的弧段组合以后,还需要对弧段进行整体分组。对于任一对弧组,我们选取它们的一组生成路径平行弦l1和l2,对应的弦中点为M1和Mn,如图5所示,采用最小二乘法拟合这些平行弦的中心线,如图5中虚线所示。定义每条平行弦中心点Mi到拟合中心线的垂直距离为di,l,则平均垂直距离d-可以表示为

若平均垂直距离d-,即平均误差,小于设定的阈值dmax,则判定该弧组是属于同一个椭圆的。把椭圆弧组合在一起之后,还要确定分组的弧段是否适合被拟合成椭圆。为了提高运行速度,给每个弧组标定一个级别Grade来表示其适合程度,若Grade小于设定阈值TG,则其并不合适[17]。Grade计算公式:

其中,Li是给定弧段 Arci的弧长,Di是前一条弧段的尾端点和后一条弧段首端点间的距离。
椭圆的一般性质方程可以表示为

其中,x和y分别是弧段组合以后得到的边段点的横纵坐标,A,B,C,D和E是满足椭圆方程的五个参数。为了减少参数计算的时间,本文采用直接最小二乘法(DLS)[18],可以快速、正确地拟合到椭圆。最后,利用文章的方法计算误差En来判断检测到的第n个椭圆是否为图像中合理存在的椭圆,若En小于设定的阈值TE,则该椭圆是真的,反之,则舍弃掉。En的计算公式:

其中,Nn为检测到的第n个椭圆的所含像素点的数目,这个椭圆上的每个像素点用Pn,k表示,b为此椭圆短轴的大小,为距离 Pn,k最近的边缘点。
4 算法求解
4.1 改进花授粉算法
为了令单目视觉中的弧段和椭圆检测计算过程在精度上有所提升,本研究将采用改进花授粉算法(IFPA)进行求解。在规则进行更新中,植物的异花授粉可以视为一个全局授粉的过程,其传粉运载体遵循Lévy轨迹[19],全局授粉规则中花粉配子是由传粉者携带,如昆虫携带花粉。由于昆虫可以在较长的时间范围内远距离飞行。因此,花授粉可以在数学上表示为


4.2 动态变换概率策略(DSPS)
在IFPA中,转换概率 p∈[0,1]控制局部搜索和全局搜索,它是一个恒定常量。假设一个合理的算法应该满足在开始搜索过程中的全局搜索功能。因此,应用动态变换概率策略(DSPS)调整两种搜索过程的比例[20]。变换概率 p可以进行选择
p=0.6-0.1×(Max_iter-t)/Max_iter (14)其中,Max_iter代表DDIFPA的最大迭代次数,t表示当前迭代次数。花授粉改进算法(IFPA)的求解无人机飞行过程中通过单目视觉捕捉到的图像分析伪代码算法如下:

5 仿真实验
5.1 实验装置
所有的算法在CPU配置为Intel酷睿i5 4590,内存为4GB中,运用Matlab R2012a编程进行计算。
5.2 环境假设
在测试IFPA适用性之前,本研究通过与DE算法在2D的空间区域内选择维度D=5,10,15 和20进行比较。首先确定起点、终点和威胁点。假设存在以下地图信息,无人机路径从起点( )5,10 到终点。在这个战斗区域中,安全性能和燃料的性能之间的平衡系数k=0.5,并假设存在五个威胁点区域。他们的半径坐标和对应的威胁如表1所示。

表1 威胁点信息
5.3 性能分析
在维度D=10的分段区域内,DE和IFPA的规划路径如图6和图7所示,收敛曲线的如图8所示。

图6 D=10时DE算法路径

图7 D=10时单目视觉下的IFPA算法路径
图6显示DE成功避开五个威胁点区域的规划道路且为平滑。图7显示IFPA也可以计划一个安全的路径来逃避上面提到的这些威胁且也较为平滑。图8表明收敛曲线在10维度条件下,IFPA算法的收敛速度更快。

图8 D=10时两算法性能对比
在维度D=20的分段区域内,DE和IFPA的规划路径如图9和图10所示,收敛曲线的如图11所示。

图9 D=20时DE算法路径

图10 D=20时单目视觉下的IFPA算法路径

图11 D=20时两算法性能对比
图9显示DE没有避开威胁点区域,进入了第2个威胁点构成的威胁区域。图10中IFPA路径通过距离相比图7的路径更短,且与DE生成路径相比更安全。图11表明,相比DE生成收敛曲线,IFPA有更快的收敛速度和收敛曲线平滑。
6 结语
本文对无人机在复杂环境中自动避开威胁点障碍物进行了研究,采用单目视觉采集到的每一帧图像进行弧段提取和边缘检测。在弧段分组和直接最小二乘法的椭圆检测方法中,对相似的椭圆进行合并,最后确定障碍物的位置。利用动态变换概率策略(DSPS)对改进花授粉(IFPA)进行优化,以增强其搜索能力。提出的基于单目视觉下的IFPA用于解决在空间区域中的无人机路径规划问题,能找到一个路径航行距离较短和有效避免威胁的最优全局路径规划方式。为了更直观地说明寻优结果,选择维度在D=10和20时,比较DE算法和IFPA算法,通过比较两个算法的路径规划结果及其收敛曲线,IFPA比DE有更快的收敛速度和更为顺畅的路径,单目视觉下的IPFA更适合解决复杂的无人机避障最优路径规划问题。
猜你喜欢
数学杂志(2022年5期)2022-12-02
现代工业经济和信息化(2022年9期)2022-11-03
导弹与航天运载技术(2022年2期)2022-05-09
汽车实用技术(2022年4期)2022-03-07
中学生数理化(高中版.高二数学)(2021年12期)2021-04-26
计算机技术与发展(2020年4期)2020-04-30
电加工与模具(2020年2期)2020-04-29
新教育论坛(2019年14期)2019-09-10
中国新通信(2019年23期)2019-03-27
电子制作(2018年12期)2018-08-01