应用于冷气微推力器的压电晶片驱动稳定性分析
2018-10-11 06:14韩铭麟汪旭东
兵器装备工程学报 2018年9期
韩铭麟,陈 君,汪旭东,张 涛
(北京控制工程研究所, 北京 100090)
冷气微推力器是通过调节比例阀开度以控制卫星推力的器件,具有高精度、快响应、噪声低的工作特点[1],在LISA、GOCE[2]等无拖曳卫星上具有很好的应用前景。欧空局为了实现LISA卫星的推力器小推力,低噪声的技术要求,采用新型的三层压电晶片驱动比例阀,实现推力精确调节[3]。目前,国内对地球重力场测量和引力波探测项目的研究[4]已提上日程,需要迫切解决驱动机构的精度问题。传统的电磁类流体控制部件由于其功耗、精度、干扰等原因不能满足卫星高精度、快响应、噪声低的工作需求。采用压电驱动技术[5]成为解决该问题的最佳选择。北京控制工程研究所对叠堆型压电驱动器进行了动力学建模及实验研究[6],并成功应用于星载冷气推力器。与此同时,北京控制工程研究所研制的新型压电晶片驱动比例阀也计划应用于无拖曳卫星[7]。然而,由于单晶片驱动机构具有位移小的缺点[8],需要采用多片串联,增大驱动位移的方式,但压电片数增多可能会导致驱动机构不稳定。因此,针对多自由度压电晶片驱动机构模型的建立及稳定性的分析研究是必要的。
本文研究对象是多自由度压电晶片驱动机构,对其建立了多自由度质量块—弹簧—阻尼等效模型[9]。通过对压电晶片驱动机构模型中等效刚度和阻尼系数变参数研究系统在不同情况下的能控性及稳定性[10]。本文研究采用MATLAB数学软件[11,12]计算系统的阶跃响应和对应的零极点分布图,得出系统是镇定的,阶跃响应稳定在3.34×10-6m。
1 压电晶片驱动等效模型建立
1.1 单片压电晶片等效模型建立
单片压电晶片结构如图1所示。整个压电晶片分为3层,分别为压电层(PZT),粘结层和被动金属板层。对单片压电晶片通电,由于逆压电效应,PZT产生弯曲变形,整个3层结构受力变形输出位移[13]。
单片压电晶片受电压激励弯曲变形的运动模型,可以等效为弹簧的弹性变形与阻尼的减振共同作用的运动模型。压电环片和连接的质量块构成质量—弹簧—阻尼系统,如图2所示。
质量—弹簧—阻尼等效模型动力学方程:
(1)
式中:c为黏性阻尼系数;x为质量块由静止平衡位置开始的振动位移;k为系统等效刚度;F0为系统受的外部力。
圆形板压电片等效刚度表达式
(2)
式中:a为圆板半径;h为压电环片总厚度;Ee为等效弹性模量;ve为等效泊松比。
而单片压电晶片是复杂的圆环结构粘结而成。要计算单片压电晶片,可将其复杂的结构分解为单独的内、中、外3个圆环结构,分解结构如图3所示。单片压电晶片分解为3个简单的圆环结构[13],所以只要知道圆环片的等效刚度计算方法,便能求出单片压电晶片等效刚度。
圆板和圆环均可以看成弹性元件。在一个圆板内分割出一个小圆板和圆环,故大圆板的弯曲变形可以认为是小圆板和圆环分别弯曲变形合成,所以小圆板、圆环与大圆板的挠度形变过程可以等效为两个弹簧的串联,大圆板为复合弹簧。
以外环为例,其等效刚度为
(3)
式中:Rp是外环外径;Ro为外环内径;k11为大圆板等效刚度;k12为小圆板等效刚度,根据弹簧串联模型得到外环等效刚度k1。同理,内环等效刚度k2,中环等效刚度k3通过同样的方式获得,最终得到单片压电晶片等效刚度
(4)
在流体驱动元件中,相对阻尼系数ξ与弹性元件刚度k之间的关系
(5)
由以上方法分析获得单片压电晶片的等效刚度k和阻尼系数c。且由公式知,阻尼系数c与刚度k成正比关系。
1.2 多自由度压电晶片等效模型建立
当多自由度压电晶片受到电压激励后,会做出相应的响应,产生挠度变化,最终到达稳态位置。而在响应过程中由于压电片的刚度—阻尼作用,需要一定的响应时间。整个响应过程可以看作多自由度质量块—弹簧—阻尼系统,而输入的电压激励仅仅决定等效模型中弹簧的形变量,因为电压的变化,决定最终稳态位置,即影响弹簧等效初始形变量,并不会对多自由度压电晶片的材料刚度和阻尼产生影响,所以对其建立等效的多自由度质量块—弹簧—阻尼模型是合理的。
以5层的压电晶片为例,进行建模如图4所示。通过数轴法建模使质量块—弹簧—阻尼系统描述更为简单。
从系统的机理出发建立该模型的动力学方程为
(6)
式中:x1~x5为物块1~5的弹簧伸长量;M1~M5分别为物块质量;x6~x10为物块对应的速度;PA为最后一层驱动机构受到的阀内气流压力载荷;y为整个多自由度压电晶片的弯曲挠度。
为了分析方便,将该模型写为状态空间表达式:
(7)
2 系统模型特性分析
从1.2节建立的模型得到系统是一个线性定常系统。对线性定常系统,一般先判断系统的能控性,若能控,便可设计相应的控制器使驱动作用更加精确;若不能控,则判断系统不能控子块是否稳定,即系统是否镇定,对于镇定系统,便可从硬件入手,如改变材料刚度,阻尼等,使系统满足稳态指标;若是非镇定系统,则该驱动系统无法工作。
常用的系统能控性判别是通过能控性矩阵是否满秩判断。对于五层压电晶片模型,该矩阵为
(8)
很明显,由于B秩是1,所以,M的秩也小于10,即rank(M)<10,系统不可控。从后面的仿真数值计算也可验证该结论。
系统稳定性分析,常用的系统稳定性判别法有根轨迹判别,奈奎斯特图和李雅普诺夫等方法。
对于1.2节式(7)建立的状态空间方程。平衡状态xe=0渐近稳定的充要条件是矩阵A的所有特征值均具有负实部。即系统状态稳定。
从工程意义上看,往往更看重输出稳定性。系统输出稳定性的判断,需要解出其传递函数:W(s)=C(sI-A)-1B的极点。其稳定的充要条件是极点全部位于s的左半平面。
系统模型特性分析,为多自由度压电晶片驱动机构的稳定工作提供理论基础,对新型推力器的研制及改进提供帮助。
3 模型数值计算及仿真分析
单片压电晶片被动板采用的是不锈钢板,杨氏模量Ep=2.1×1011N/m2,泊松比vp=0.3;复合板等效杨氏模量取Ee=1.1×1011N/m2,泊松比ve=0.3。
经过Matlab解算,能控矩阵rank(M)=3,验证了五自由度压电晶片驱动机构不可控的结论。
由于压电晶片材料尺寸和设计结构的不同,会导致五自由度压电晶片驱动机构的等效刚度和阻尼系数变化。故对系统等效刚度和阻尼系数变参数仿真,考察系统的稳定性。
压电晶片材料的等效刚度和阻尼系数取3组不同的数据,如表1。
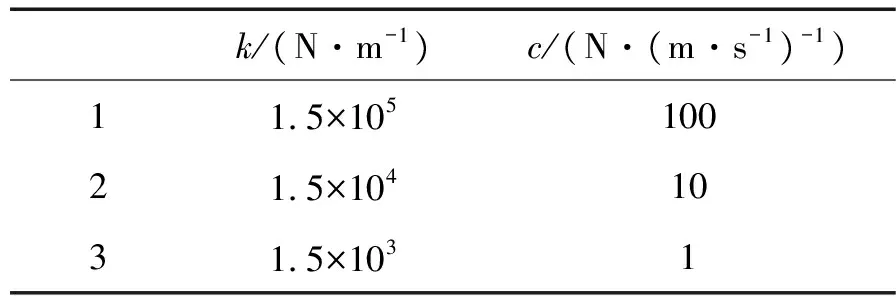
表1 三组等效刚度与阻尼系数
3组不同参数下的系统阶跃响应和零极点分布如图5。
从3组不同参数的阶跃响应可以看出,在1ms内系统均达到稳定状态,可见响应速度很快,满足新型推力器响应快的要求。随着五自由度压电晶片驱动机构的等效刚度数值的降低,相应的阻尼系数也成比例降低,系统阻尼下降,即使振荡作用加强,由仿真结果得到验证:随着阻尼减小,阶跃响应由过阻尼状态逐渐过渡到欠阻尼状态,且响应时间也相应增加。而刚度的变化则会决定系统最终的平衡状态。刚度越小,阻碍弹性形变的能力越弱,故最终稳态形变量越大。由仿真结果,的确随着刚度减弱响应幅值增大。而由右侧不同参数下的零极点分布图,也间接验证系统在等效刚度和阻尼系数变参数时,保持稳定。故整个五自由度压电晶片驱动机构是镇定系统。
为了更准确地仿真解算,多自由度压电晶片驱动机构在微推力器机构中的工作响应过程,对实际生产的压电晶片尺寸进行测量,经计算实物元件等效刚度约为k=1.45×106N/m,其阻尼系数约为c=1.02×103N/(m·s-1)。其仿真结果如图6所示。
该压电晶片驱动结构是过阻尼系统,对零极点分布结果分析,一部分有负实部,一部分聚集在零点,很难分辨,所以通过数值计算系统的10个极点,其负实部如表2所示。

表2 系统极点实部数值
其10个极点均有负实部,是稳定系统,可知压电晶片能稳定工作,但系统rank(M)=3,不可控,若要改善系统性能,只能通过改变系统刚度和阻尼系数。从仿真结果看出,响应较快,4×10-3s左右到达稳态,且响应稳定在3.34×10-6m,达到μm量级能作为精确控制的驱动机构。
4 结论
1) 多自由度压电晶片结构是一个过阻尼系统,响应速度快。
2) 由多自由度压电晶片等效模型知,该驱动机构不可控,其极点具有负实部,其系统是镇定的,即稳定的。响应稳定在3.34×10-6m。
3) 对多自由度压电晶片驱动机构稳定性分析为其模型和可行性提供理论基础,对新型推力器的研制及改进提供帮助。后续可进一步实验,辨识准确的等效刚度和阻尼系数等参数。
猜你喜欢
电子工业专用设备(2022年1期)2022-07-13
河南科技学院学报(自然科学版)(2022年3期)2022-06-10
空间控制技术与应用(2021年4期)2021-08-02
空间控制技术与应用(2021年1期)2021-04-25
军民两用技术与产品(2021年10期)2021-03-16
作文与考试·高中版(2021年3期)2021-01-14
航天器工程(2019年1期)2019-03-06
电子技术与软件工程(2018年11期)2018-02-25
湖南大学学报·自然科学版(2014年2期)2014-12-25
电子设计应用(2004年6期)2004-07-27