
航空三级式起动/发电系统两相励磁机九段式SVPWM调制方法
2019-03-29 03:02焦宁飞高芳宁刘卫国
微电机 2019年2期
焦宁飞,高芳宁,刘卫国
(西北工业大学 自动化学院,西安 710072)
0 引 言
随着多电飞机的迅猛发展,具有体积重量小、结构简单、集成度高等优势的起动发电一体化系统已成为当前航空电源领域的研究热点[1]。三级式无刷同步电机集可靠性高、使用周期长以及发电技术成熟等优势于一身,使得该类电机在航空起动发电一体化应用中具有重大潜力。三级式无刷同步电机作为发电机在发电状态下的研究及应用已较为成熟,实现航空三级式无刷同步起动发电一体化系统(以下简称三级式起发系统)的重点在于该电机起动阶段的研究。
航空三级式起发系统起动静止和低速阶段面临主电机励磁电流为零或较小的问题,使其很难输出足够大的电磁转矩实现航空发动机的平稳起动[2]。文献[3]中提出一种两相励磁机结构及控制策略,可有效提升系统起动静止和低速阶段主电机励磁电流,进而提升系统输出转矩,为该系统带动航空发动机的顺利起动提供保障。
基于两相励磁机的航空三级式起发系统结构示意图如图1所示,主要由副励磁机、两相励磁机、旋转整流器和主电机组成。副励磁机不参与系统起动阶段,仅在系统发电阶段为励磁机提供励磁电流。励磁机为转枢式发电机,其定子励磁绕组为两相对称绕组结构,故称为两相励磁机。主电机为电励磁同步电机,可运行在电动状态带动航空发动机起动,起动完成后工作在发电状态为机载设备提供电能。

图1 基于两相励磁机的航空三级式起发系统结构示意图
三级式起发系统起动阶段,两相励磁机由两相逆变电路提供两相交流电进行励磁,励磁机转子三相绕组上感应的三相交流电经旋转整流器整流后为主电机提供励磁电流,主电机由起动控制器控制运行在电动状态,输出电磁转矩带动航空发动机起动。
常见的两相逆变电路拓扑包括[4]:两桥臂两相逆变电路[5],三桥臂两相逆变电路[6]和四桥臂两相逆变电路[7]。前期的研究表明,励磁机励磁电压幅值的升高可有效增大主电机励磁电流,进而提升电机输出转矩[3]。在航空直流电源270VDC的限制下,为了最大限度地提升励磁机励磁电压,选择电压利用率最高的四桥臂两相逆变电路。
两相逆变电路采用脉宽调制(PWM)方法产生两相交流电。相比于正弦波脉宽调制(SPWM)方式,空间矢量脉宽调制(SVPWM)方式谐波含量低,开关损耗小,已广泛应用于各类电机驱动控制中。针对三相逆变电路的SVPWM研究较多且已成熟,而针对两相逆变电路的SVPWM研究较少。文献[6]中开展了三桥臂两相逆变电路的SVPWM研究及应用;文献[8]中针对四桥臂两相逆变电路提出了五段式SVPWM调制方式,并在两相直线电机上得到应用。
通过对航空三级式起发系统中四桥臂两相逆变电路基本矢量的分析,本文提出一种两相逆变电路九段式SVPWM调制方法,给出了详细的推导过程及实现方法,并进行了仿真分析。搭建了三级式起发系统实验平台,针对两相励磁机采用九段式SVPWM调制方法开展了实验验证。仿真及实验结果证明了本文提出的两相逆变器九段式SVPWM调制方法的优势和有效性。
1 四桥臂两相逆变电路基本矢量分析
四桥臂两相逆变电路结构示意图如图2所示,其由两个H桥逆变电路组成,故也被称为双H桥两相逆变电路。为了防止直通,逆变器每个桥臂的上下两个功率管的开通关断状态互补,故在分析两相逆变电路电压矢量输出时仅考虑上管的通断情况。

图2 两相逆变电路拓扑结构
1.1 电压空间基本矢量
四桥臂两相逆变电路四个桥臂的上管分别用A1,B1,C1,D1表示,可分别处于开通或关断状态,互不约束。故四桥臂两相逆变电路共可输出16个基本矢量,包括12 个非零矢量和4个零矢量,如表1所示,其中1代表开通,0代表关断。
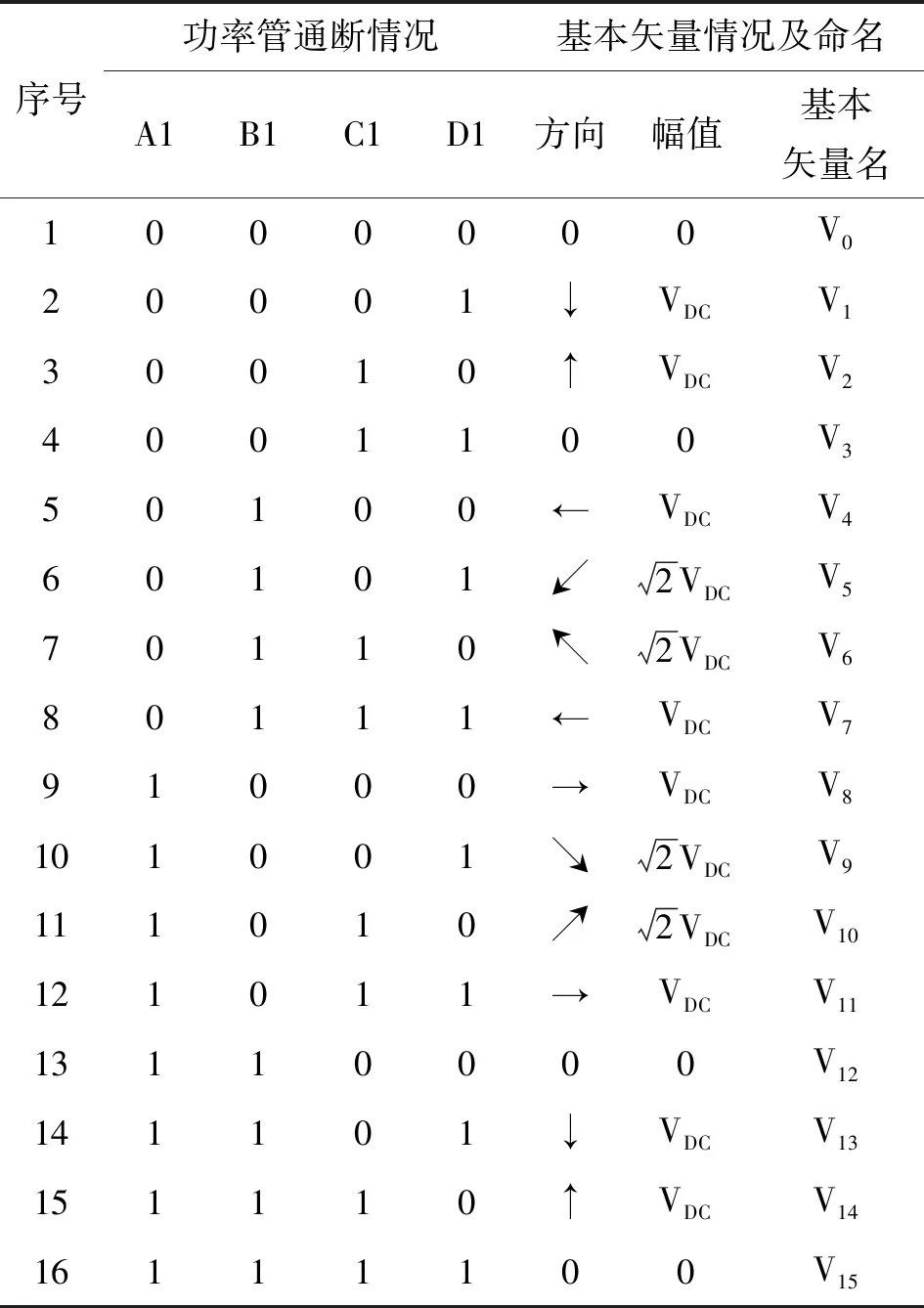
表1 四桥臂两相逆变电路的基本矢量
1.2 基本矢量的归分
从表1中可以看出,在16个基本矢量中有部分矢量的方向和幅值都相同。故可将上述16个基本矢量归分为9个各不相同的矢量,如表2所示。
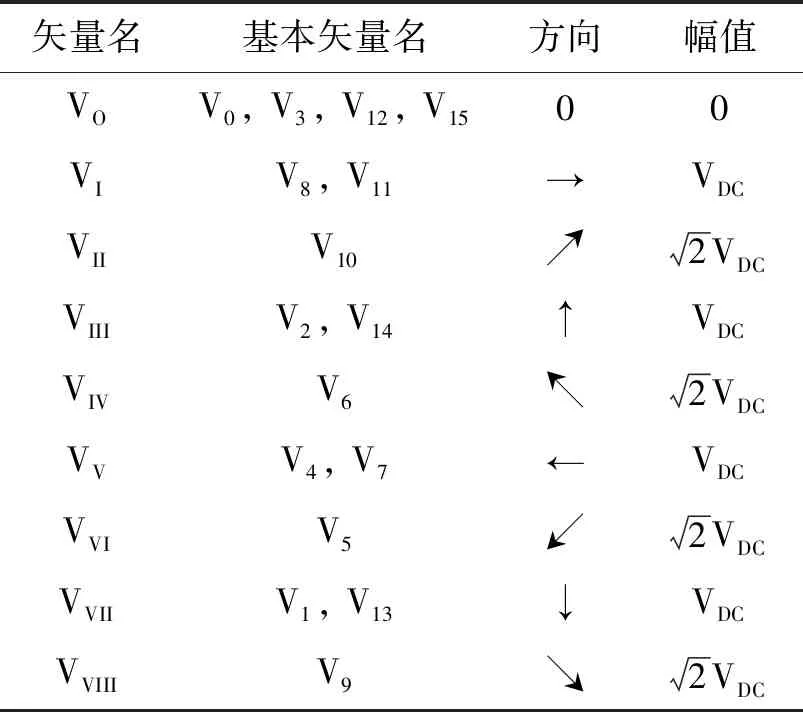
表2 四桥臂两相逆变电路基本矢量的归分
在直角坐标系中分别表示16个基本矢量和归分后的9个矢量,并根据矢量分布图的结构特点,将整个区域划分为8个扇区,分别表示为:Ⅰ、Ⅱ、Ⅲ、Ⅳ、Ⅴ、Ⅵ、Ⅶ、Ⅷ,如图3所示。
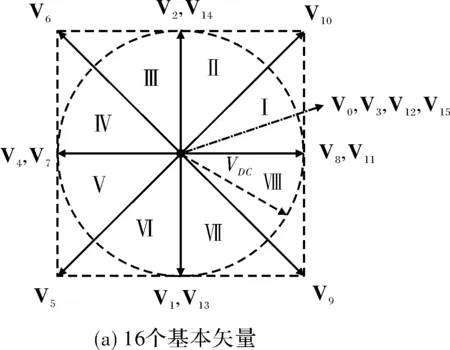
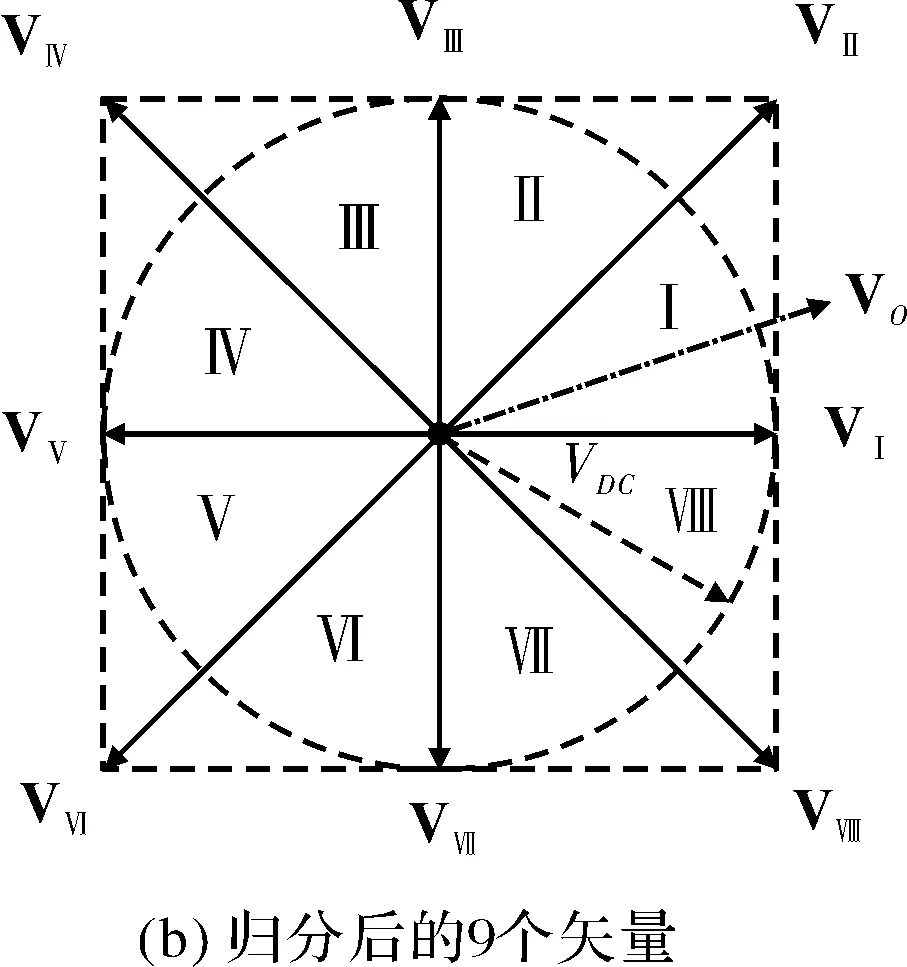
图3 四桥臂两相逆变电路矢量分布图
2 两相逆变电路九段式SVPWM
2.1 基本矢量作用时间计算
以位于第Ⅰ扇区的矢量合成为例,来说明四桥臂两相逆变电路空间电压矢量的调制计算过程。图4为处于第Ⅰ扇区的矢量合成示意图,Vref为需要合成的参考电压矢量,由两个边界矢量VⅠ和VⅡ在一定的作用时间下合成。
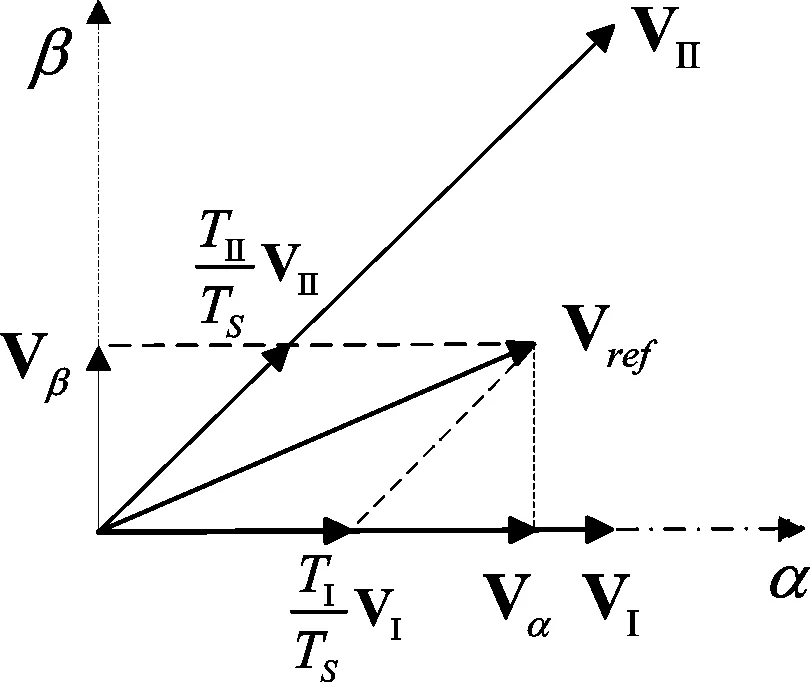
图4 处于第Ⅰ扇区的矢量合成示意图
首先将参考矢量Vref在αβ坐标系下分解为相互垂直的两个矢量Vα和Vβ。选择VⅠ和VⅡ作为基本矢量,VⅠ、VⅡ和零矢量的作用时间分别记为TⅠ、TⅡ,和To,Ts为调制周期,根据矢量合成原理可得:
TsVref=TⅠVⅠ+TⅡVⅡ
(1)
Vref=(TⅠ/TS)VⅠ+(TⅡ/TS)VⅡ
(2)
根据图4可得:

将VⅠ和VⅡ的幅值带入式(3)并整理后可得:
TⅠ=(Vα-Vβ)TS/VDC
TⅡ=VβTS/VDC
TO=TS-TⅠ-TⅡ
(4)
式(4)即给出了第Ⅰ扇区两个基本矢量各自的作用时间。

为了SVPWM调制方法在实际编程中实现方便,可将不同扇区基本矢量的计算公式统一归化为
其中,Kα,Kβ,Pα,Pβ为系数,其在8个扇区的取值可根据TK和TK+1的计算式获得,如表3右侧4栏所示。

表3 每个扇区合成矢量时两个基本矢量作用时间计算式
2.2 开关序列
在获取了每个扇区合成目标矢量时有效工作矢量的作用时间后,还需确定每个周期内不同扇区各个功率管的开关序列。为了减小开关损耗和提高工作效率,每一个调制周期都以全零矢量状态开始和结束。根据每个调制周期被划分的小区段数量,可以将两相SVPWM调制分为五段式、七段式和九段式三种不同的调制方式。下面以第Ⅰ扇区内的SVPWM调制为例,依次说明五段式、七段式和本文提出的九段式调制方式。
第Ⅰ扇区的两个边界基本矢量是VⅠ(V8,V11)和VⅡ(V10),其作用时间分别为TⅠ和TⅡ;零矢量的作用时间记为TO。采用五段式调制方式时,将零矢量和VⅠ矢量分成两等分,VⅡ矢量不划分,故一个调制周期被分成了5段,如图5(a)所示。采用七段式调制方式时,将零矢量分成4等份,VⅠ和VⅡ矢量都分成两等份,故一个调制周期被分成7段,如图5(b)所示。四桥臂两相逆变电路的结构特点使得VⅠ中含有两个基本矢量V8和V11,而七段式调制方式仅用到了一个基本矢量V8。本文提出的九段式调制方法,在七段式调制方法的基础上,将VⅠ矢量分成四个等份,其中两份采用基本矢量V8,另两份采用基本矢量V11,故一个调制周期被分成了9段,如图5(c)所示。
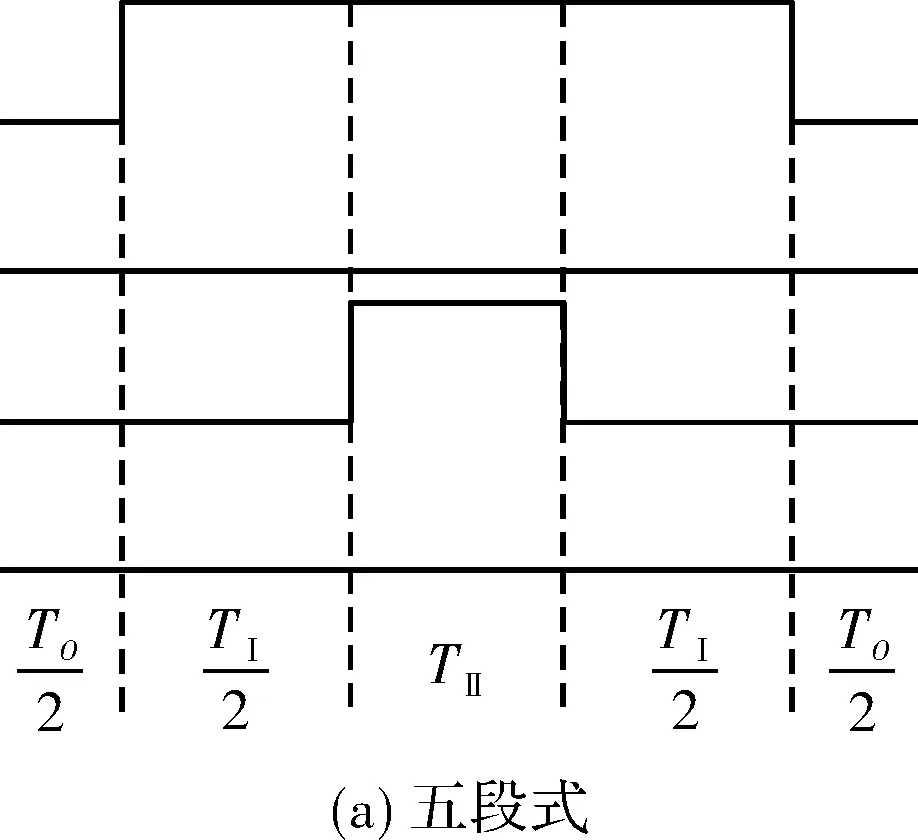


图5 第Ⅰ扇区两相SVPWM调制开关序列
对比图5中三种调制方式的开关序列图可以看出,五段式调制方式下,每个调制周期中仅有一半的功率管通断,相较于七段式和九段式调制方法,开关频率低,功率损耗小。而九段式调制方法相比于五段式和七段式,由于其将一个周期划分为9等份,故其调制效果更接近于正弦波,所含谐波含量最小,这对于减小电机高频损耗、降低电机电磁干扰等都具有重要意义。
采用相同的分析方法可以获取四桥臂两相逆变电路在其他扇区采用九段式SVPWM调制方式时的开关序列,如图6所示。
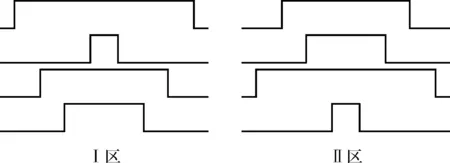
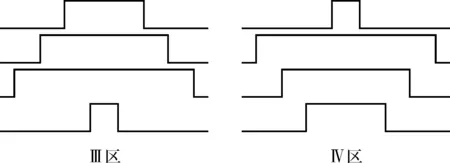


图6 双全桥两相逆变电路采用九段式空间矢量调制方式时的开关序列
3 仿真分析
在Matlab/Simulink软件中建立四桥臂两相逆变电路九段式SVPWM调制仿真模型,并进行仿真分析。仿真结果如图7所示,包括两相交流电流波形和两相逆变电路上管通断信号局部图。仿真结果验证了九段式两相SVPWM调制方法的有效性。

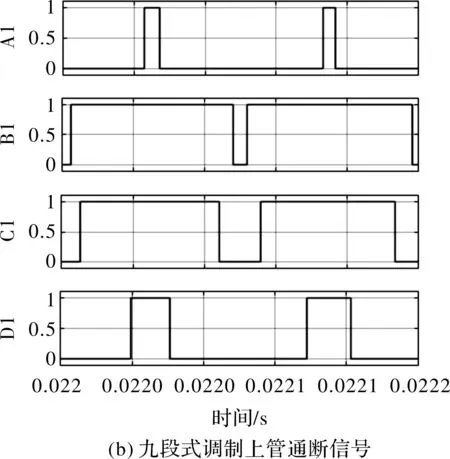
图7 两相SVPWM调制Matlab/Simulink仿真结果
同时,在Matlab/Simulink软件中建立五段式和七段式SVPWM调制仿真模型,并与九段式SVPWM调制结果进行仿真对比,结果如图8所示。从图8中可以看出,九段式SVPWM调制下两相交流电谐波含量明显小于五段式和七段式,即九段式SVPWM的调制效果最好。两相逆变电路三种调制方式的仿真对比验证了九段式SVPWM调制的优势,即可以有效降低两相交流电谐波含量。
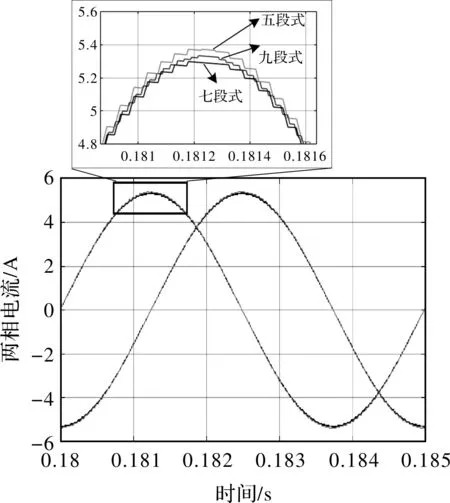
图8 五段式、七段式、九段式SVPWM调制效果对比
4 实验验证
针对一台基于两相励磁机的三级式起发电机样机搭建试验平台,如图9所示。其中包括主电机控制器、两相励磁机控制器、负载加载台以及三级式起发电机原理样机。采用Fluk电流钳测量励磁机两相励磁电流,并在LeCroy示波器上进行显示。
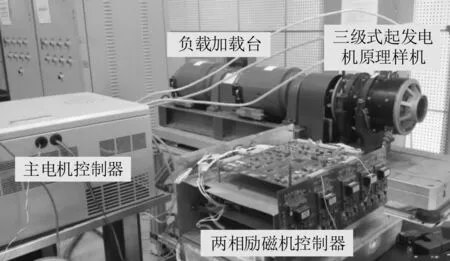
图9 试验验证平台
两相励磁机控制器中的四桥臂两相逆变电路采用九段式SVPWM调制方法进行脉宽调制。最终得到的两相励磁机励磁电流实验测试波形如图10所示。需要说明的是,由于励磁机转子电枢绕组接旋转整流器,因此励磁机转子电流中含有由于不控整流引起的较大的谐波含量,最终导致励磁机两相励磁电流中也含有与之相应的谐波分量。
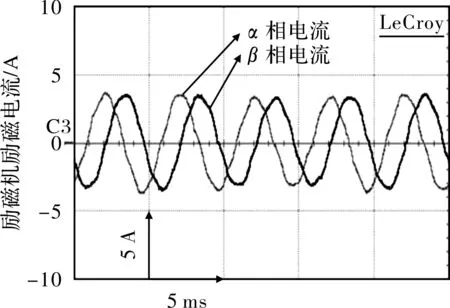
图10 励磁机两相励磁电流实验测试波形
5 结 论
针对航空三级式起发系统两相励磁机,本文提出一种九段式两相SVPWM调制方法,并通过基本矢量分析、作用时间计算以及开关序列确定详细说明了该调制方法,同时进行了仿真分析和实验测试。仿真和实验结果验证了本文提出的九段式SVPWM调制方法的有效性以及可有效降低电流谐波含量的优势。
猜你喜欢
大电机技术(2022年3期)2022-08-06
大电机技术(2022年2期)2022-06-05
大电机技术(2022年2期)2022-06-05
南北桥(2022年2期)2022-05-31
防爆电机(2022年1期)2022-02-16
北京航空航天大学学报(2021年9期)2021-11-02
中学生数理化·高一版(2021年11期)2021-09-05
科学技术创新(2021年10期)2021-04-26
航空学报(2018年12期)2019-01-18
航空世界(2018年12期)2018-07-16
