
无刷直流电机无位置传感器检测电路分析
2019-03-29 03:02周翔宇陈少华宋言明祝连庆
微电机 2019年2期
周翔宇,陈少华,宋言明,祝连庆,
(1.北京信息科技大学 光电测试技术及仪器教育部重点实验室,北京 100192;2.北京信息科技大学 光纤传感与系统北京实验室,北京 100016)
0 引 言
无刷直流电机具有结构简单,性能优越,单位功率密度高,技术成熟可靠等诸多优点,被广泛的应用于国防安全系统、航天航空技术、机器人、工业控制等领域。传统的无刷直流电机采用六步法控制,即一个周期内逆变器功率器件两两导通,每隔60°换相一次,通过转子位置传感器实时检测转子位置,确定换相时刻。常用的转子位置传感器有霍尔传感器,电式位置传感器和磁敏式位置传感器等。但传感器的安装将增大电机体积,降低系统的可靠性。在一些恶劣的环境下会产生很大的位置误差,失去传感器的本质功能,且维修困难,导致系统的可靠性变差,限制了电机在特定场合下的应用[1]。因此,深入研究具有无位置传感器的无刷直流电机控制方法具有广泛的应用价值和深远的科学意义。
无位置传感器控制是无刷直流电机(Brushless DC Motor,BLDCM)驱动技术的研究热点,其中基于反电动势法的无位置传感器控制应用最为广泛[2-3]。反电动势法中有三次谐波检测法[4-5]和反电动势检测法[6-7],它们都是对电机的反电动势过零点提取,从而生成位置检测信号。反电动势法由于低通滤波器相移、位置信号计算延时等因素造成位置信号检测误差,会导致较大的电流峰值和转矩脉动,降低电机工作效率,增加电磁噪声等。如果相位偏移得过大还可能造成失步现象,影响电机正常运行。为此,很多学者提出消除以上误差的方法。文献[8-9]通过改进反电动势检测电路,通过双模控制较好的补偿了相位误差,但是这种方法采用了位置传感器,在某些特殊场合可靠性不高。文献[10]利用线电压之间的差值推导悬空相的相反电动势,避免了中性点的选取。以上方法未对滤波电路自身对于电机控制,位置检测以及角度滞后进行分析。
本文分析了无位置传感器检测电路在高速大功率电机应用中存在的相位滞后的原因,通过对低通滤波电路分析,结合电机控制,提出了最优滤波策略,使电机在全转速内的滞后角度适中,控制简单,实验论证了方案的可行性。
1 无刷电机数学模型及检测电路分析
1.1 无刷直流电机数学模型
无刷直流电机一般采用120°导通、每60°电角度换相一次的三相全桥进行驱动。无刷直流电机结构如图1所示。
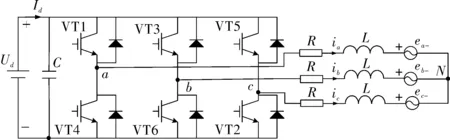
图1 无刷直流电机结构示意图
在忽略电机铁心饱和,不计涡流损耗、磁滞损耗、电枢反应和齿槽效应,无刷直流电机线电压方程如下所示:
其中,ua,ub,uc分别为电机三个相电压;ia,ib,ic分别代表电机三相线(相)电流;ea,eb,ec分别代表电机三个相反电势;R,L分别代表相电阻,电感。
本实验样机电动势设计成梯形波,利用相反电动势过零检测转子位置。图2为相反电势和相电流与换相点对应关系,其中A,B,C为电机的三相,P为转子位置信号。相电流过零点30°,90°,150°,210°,270°,330°对应电机的六个换相点。
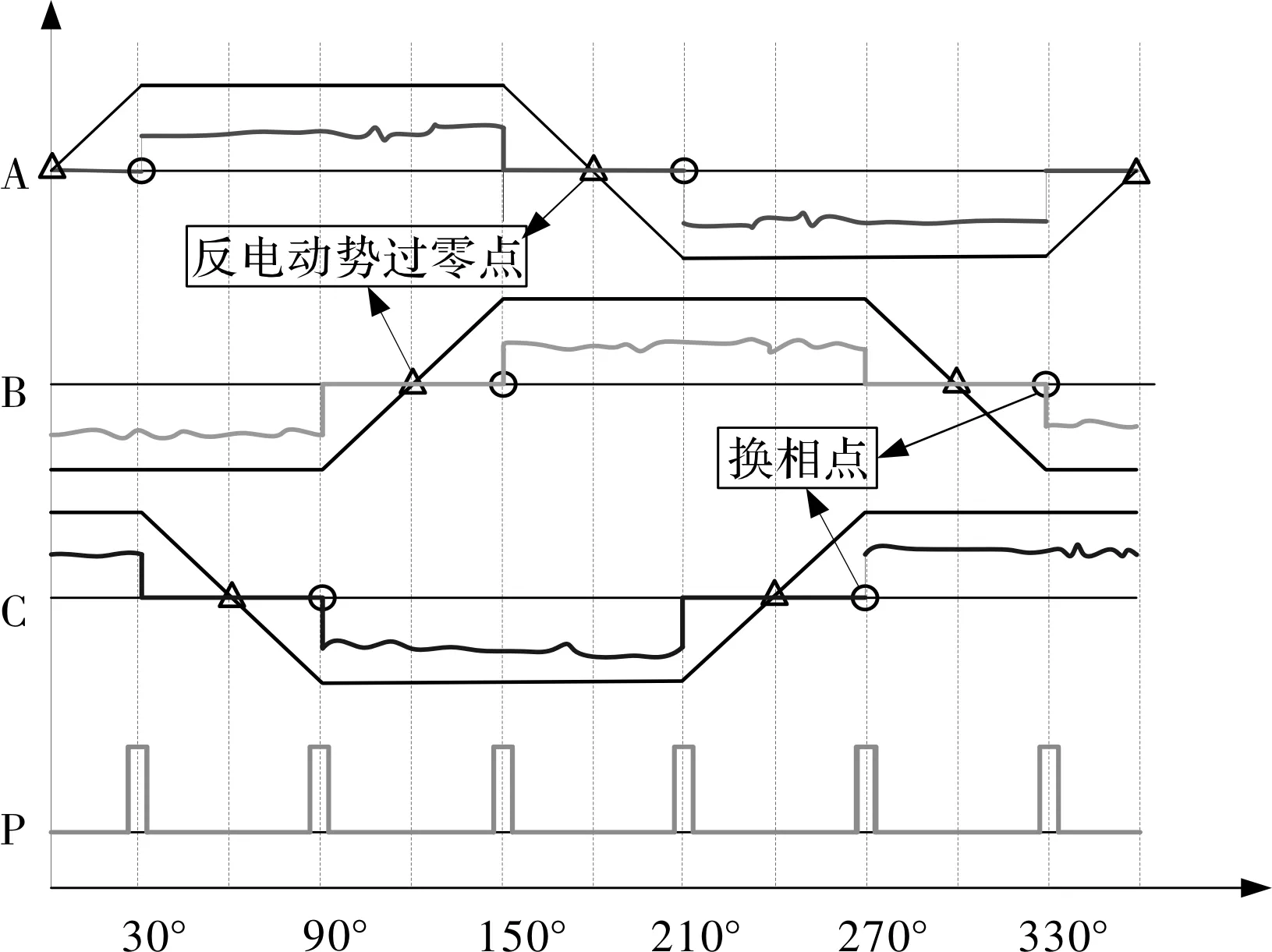
图2 相反电势和相反电势与换相点对应关系图
1.2 滤波电路结构及换相延时分析
高速大功率无刷直流电机无位置检测采用无源低通滤波电路,如图3所示。
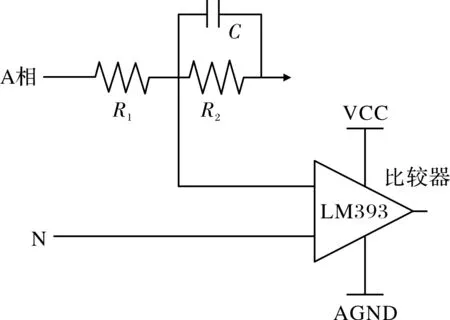
图3 低通滤波器及过零检测电路
其中,A,B,C三相的滤波电路和过零比较器相同。电流通过低通滤波之后和零电位比较,获得过零点。
无刷电机换相信号产生相移的主要因素有:低通滤波延时,相反电势滞后相电流30°(简称固定延时),电路简化延时(线电压代替线反电势引起的延时),器件延时(包含比较电路、隔离电路、整形电路延时和输出驱动电路延时),软件延时。
低通滤波电路延迟角度为
α1=arctan(CR1R2ω/(R1+R2))
R1,R2,C分别代表分压电阻和滤波电容。
简化延时角度为
α2=arctan((L-M)ω/R);
器件延时时间Δt3=1.3 μs和软件延时时间Δt4由离线测得,存入数据表中,对应延迟角度分别根据α3=ω*Δt3和α4=ω*Δt4由转速实时计算。
所以,总延迟角度α=α1+α2+α3+α4+30,随着ω的加大,延迟角度逐渐加大,所以滤波之后的相电压反电势过零点将不再对应换相点。必须采用合理的相位校正策略来补偿这个误差,否则电机性能将会受到影响。而低通滤波电路产生的延迟角度影响最大,如图4所示。所以滤波电路的参数选择对电机控制有很大的影响。
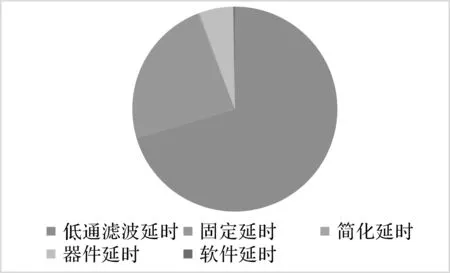
图4 换相延时因素所占比例
2 最优滤波策略
2.1 低通滤波电路特性
低通滤波电路在无刷直流电机无位置检测中起很大作用,无刷直流电机在启动初期,由于转速较小,反电动势难以检测,并且存在很多干扰,使用低通滤波可以去除多数干扰。由于高速电机功率较大,启动时电流增长过快,所以只能采用无源滤波电路。波特图如图5所示。
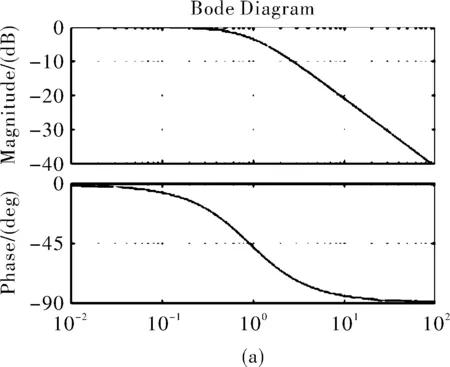
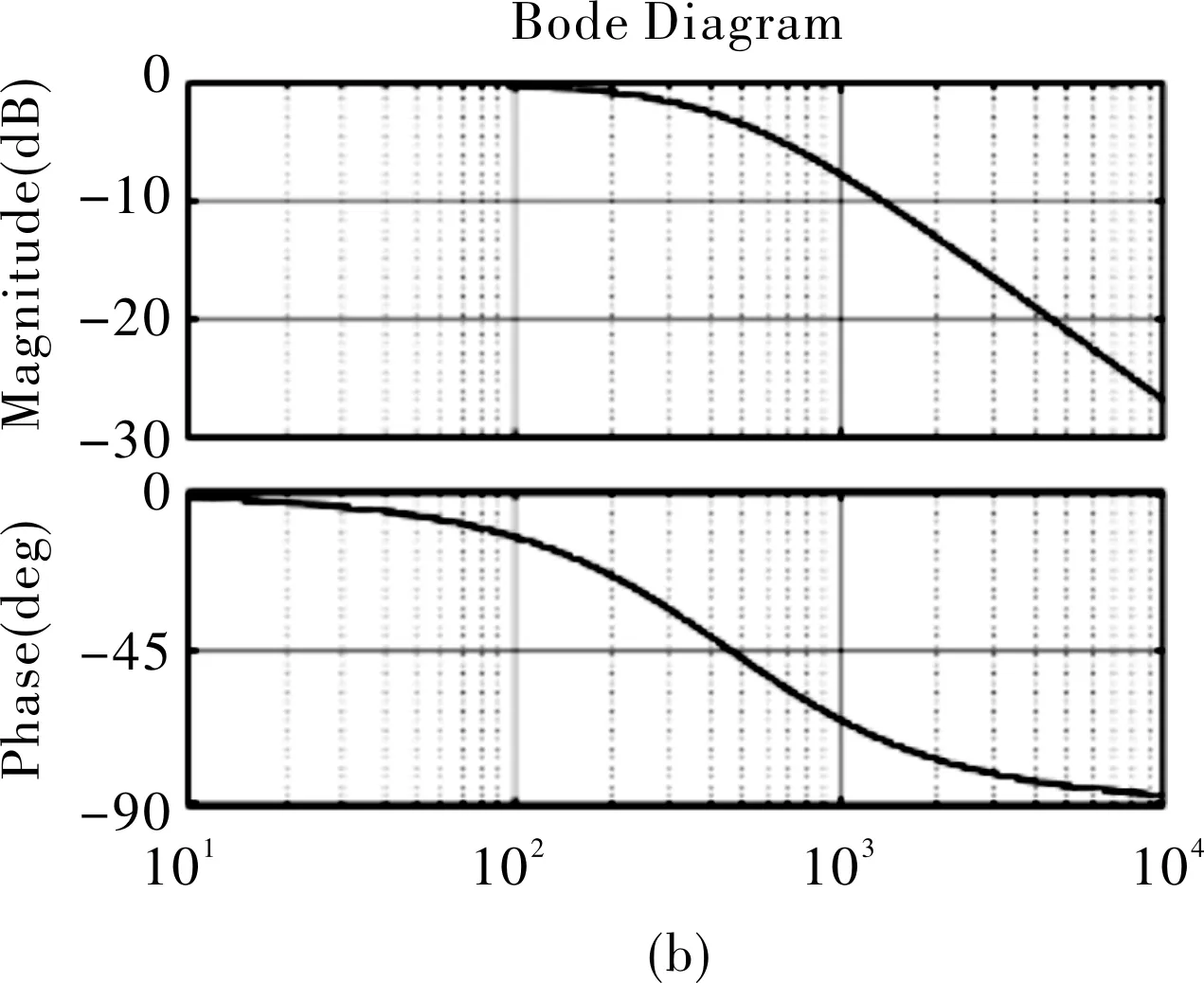
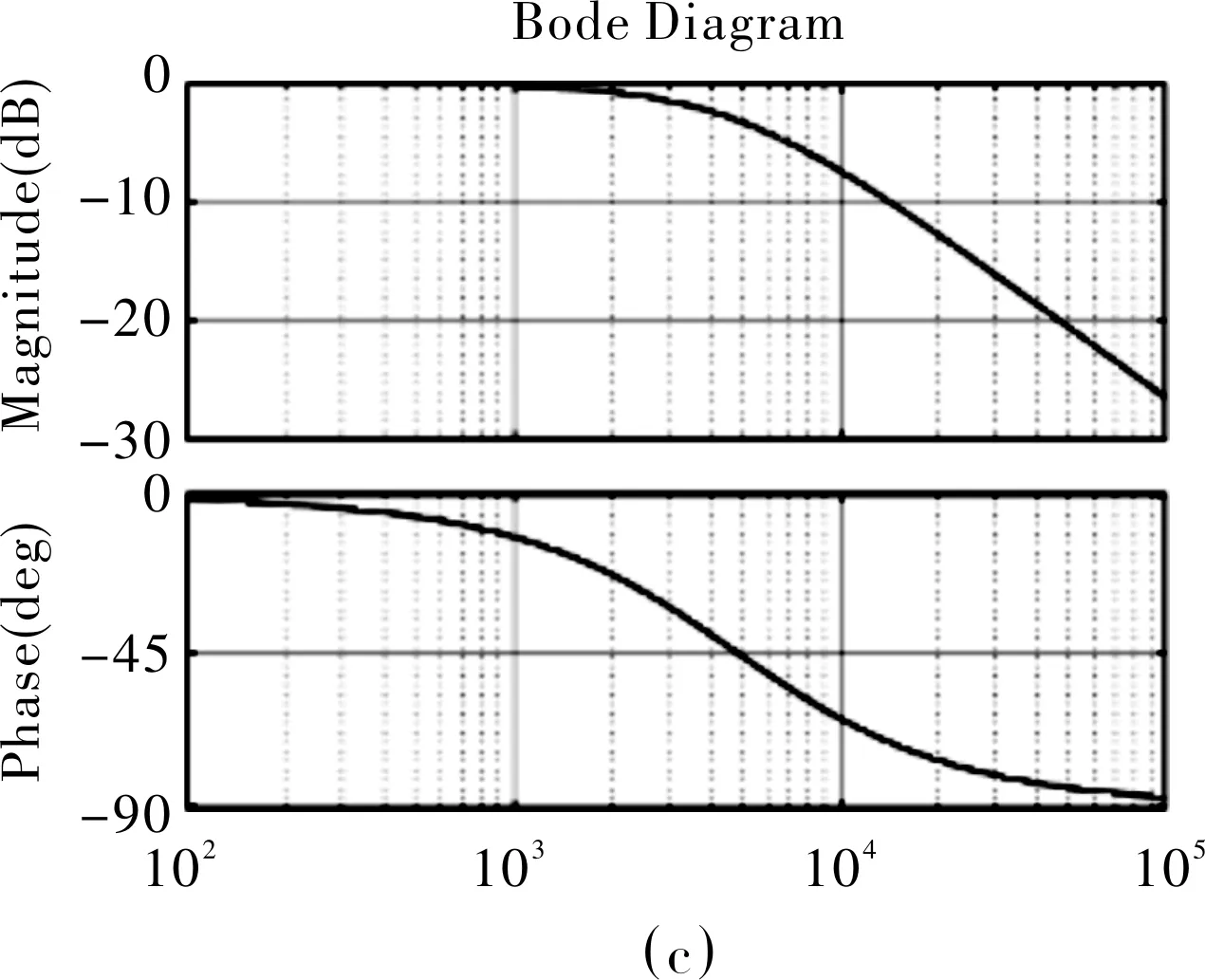

图5 截止频率分别为5.57 Hz、47.74 Hz、497 Hz、1061 Hz的波特图
从波特图可以看出截至频率越高的滤波器在电机高速时延迟角度较小,但是频率较高的时候信号衰减不够,达不到好的滤波效果。截至频率低的滤波器在电机较低转速时延迟角度接近90°,难以补偿。所以合适的滤波器对位置信号的检测及速度的控制有重要影响。
2.2 低通滤波电路参数对位置检测的影响
选取不同的滤波电路,具体参数如表1所示。
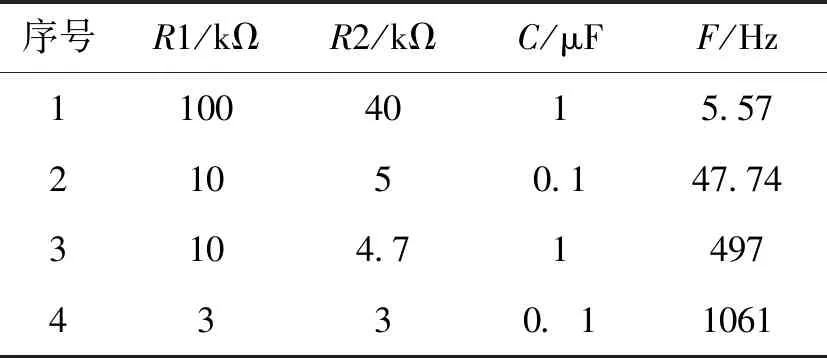
表1 不同的滤波电路参数
其中,R1和R2代表分压电阻,C为滤波电容,F为滤波器截止频率。
延迟角度与电机转速的关系为
θ=arctan(CR1R2ω/2π(R1+R2))
图6为电机转速与延迟角度关系图。
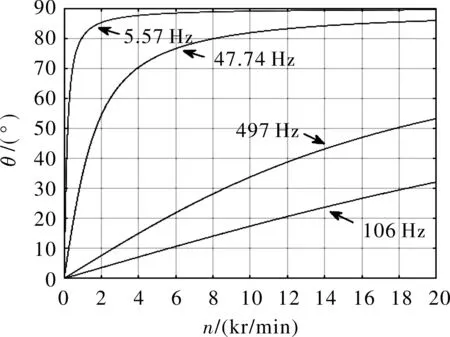
图6 不同滤波器下电机转速与延迟角度图
由图6得知截止频率越低,电机的滞后角度变化越剧烈,最终滞后角度稳定在90°处。曲线1是截止频率为5.57 Hz的曲线,可以知道在电机启动阶段虽然可以滤除很多干扰信号,但是在升速阶段,相位滞后角度变化太大且太快,硬件电路无法快速及时的对滞后角度补偿,可能会导致电机失步,甚至无法启动。而且在低速阶段滞后超过60°,会导致电机切换换相表,增加了控制复杂度。曲线2是截止频率为47.74 Hz的曲线,该曲线也存在滞后角度超过60°,需要切换换相表的问题。曲线3和曲线4截止频率为497 Hz和1061 Hz,在全转速内,滞后角度随转速的升高趋向于线性关系,便于补偿,且全转速内滞后角度未超过60°,不需要切换换相表。但是对于曲线4来说,截止频率较高,滤波效果不明显,信号中会有较多干扰,对于反电动势过零点采集带来了很大的麻烦。对于曲线3来说,既有适当的截止频率滤除干扰信号又可以线性补偿滞后角度,不需要切换就可以较好的控制电机转速。所以曲线3对应的低通滤波会带来很好的控制效果。
3 实验验证与分析
采用TI公司TMS320F28335为控制芯片,在一台2对极,额定转速10000 r/min,额定功率为1 kW,额定电压Ud=380 V的高速无刷直流电机样机平台上进行试验,实验平台如图7所示,其实现控制示意图如图8所示。
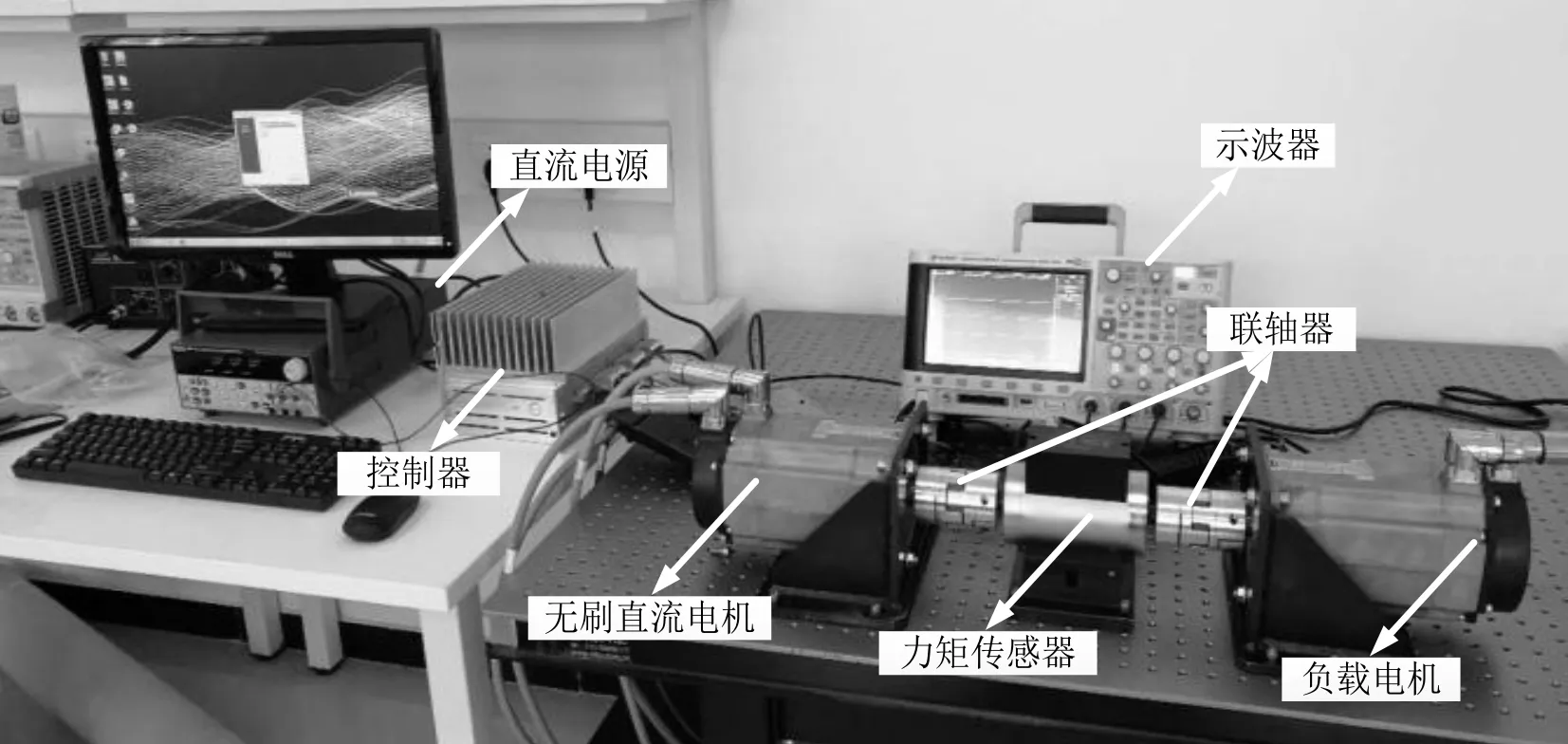
图7 高速无刷直流电机实验平台

图8 无刷直流电机控制示意图
图9 无刷直流电机位置信号检测板
无刷直流电机通过无位置信号采集板(如图9所示)采集到反电动势信号,通过比较过零点得到位置信号,通过速度环和电流环控制电机运行。最终波形如图10所示。
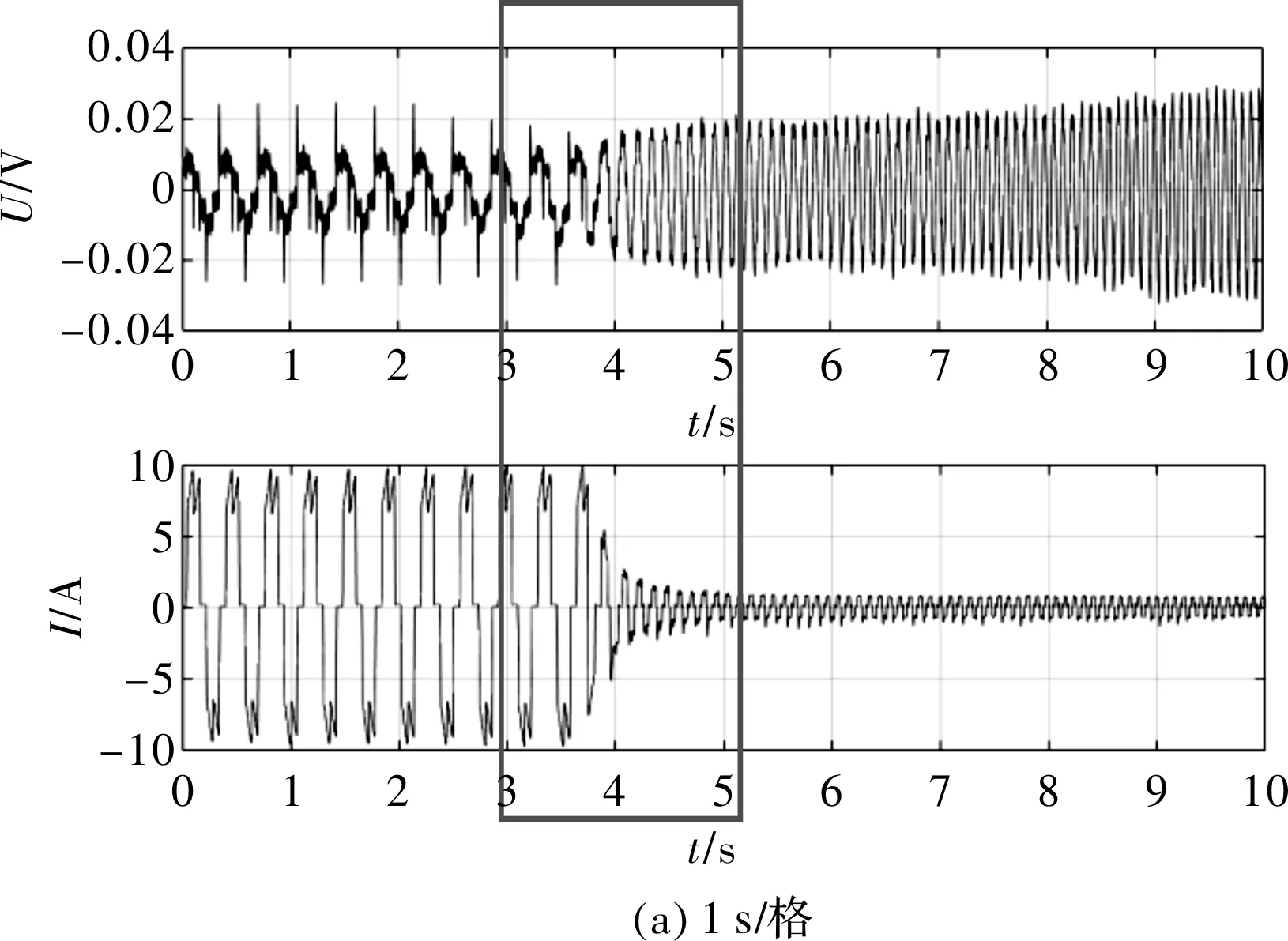
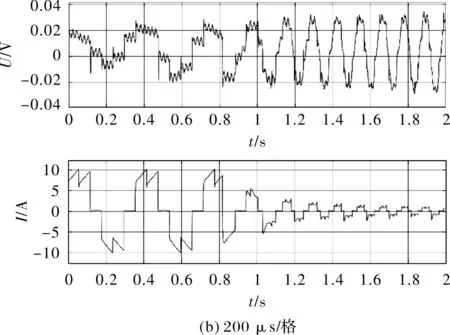
图10 无刷直流电机A相反电动势波形和电流波形
由波形图可知电机在497 Hz的滤波电路下,能够较好的检测到反电动势过零点,该滤波策略有效。
4 结 语
本文对无刷直流电机无位置传感器检测电路进行了分析,分析了不同滤波电路对电机位置检测的影响。提出了最优滤波电路策略,使电机控制不需要切换换相表的情况下既可以滤除干扰信号,又可以很好的补偿滞后角度。实验结果表明,该策略有效,控制精确。
猜你喜欢
舰船科学技术(2022年20期)2022-11-28
大电机技术(2022年5期)2022-11-17
汽车实用技术(2022年12期)2022-07-05
北京航空航天大学学报(2019年9期)2019-10-26
电子制作(2019年14期)2019-08-20
电子制作(2019年9期)2019-05-30
电子制作(2019年23期)2019-02-23
探测与控制学报(2018年4期)2018-09-11
电机与控制学报(2018年9期)2018-05-14
对联(2015年22期)2015-06-11
