
油田守护船减摇水舱设计
2019-04-25 11:36张亚明
船舶与海洋工程 2019年1期
张亚明
(上海振华重工(集团)股份有限公司,上海 200125)
0 引 言
油田守护船是集拖航、起抛锚、供应、油田守护、救助和服务等多种功能于一体的远洋船,一般工作于无遮蔽海域,工作环境受风、浪、流的影响较大。上海振华重工(集团)股份有限公司(以下简称“振华重工”)承接有某型6500HP(1hp=735.49875W)油田守护船的设计、建造合同,由于其2014年建造交付的某型15000HP三用工作拖船的减摇水舱效果不佳,在试航时遭遇7级大风,横摇角度过大,导致船舶出现甲板物资掉落海中、甲板上浪严重等现象,因此在6500HP油田守护船设计前期,拟选用可自动调节液面减摇水舱系统优化减摇效果,将船舶的减摇角度和减摇周期控制在最佳范围内,提升船员的舒适度和船舶的作业效率,保障船舶作业时人员和设备的安全[1]。本文针对6500HP油田守护船可自动调节液面减摇水舱系统的设计方案,采用水池模型试验和计算预报的方法评估减摇水舱的性能;根据实船试航数据,真实客观地评估减摇水舱的性能和水舱设计方案的可行性。
1 矩形减摇水舱的理论支撑
1.1 船舶与减摇水舱的力学模型
将在航船舶的船体简化为自由漂浮的刚体,赋予其6个自由度,分别为横荡、纵荡、艏摇、横摇、纵摇和垂荡;减摇水舱就是基于“双共振”的思路设计的,即减摇水舱内水流的振荡周期与船舶的固有横摇周期相同(谐摇现象),且波浪对船舶的横摇力矩(扰动力矩)和减摇水舱内水流对船舶的减摇力矩两者的相位相反,互相抵消,从而取得较好的减摇效果。图1为双重共振时船舶横摇角、波浪扰动力矩和水舱内水流对船舶的减摇力矩三者之间的相位角关系。
当水舱内的流体与船体复合运动时,假定船体绕过重心的纵向轴线做单纯的横摇运动,且运动呈线性,可用无因次线性微分方程描述该线性运动。
1) 对于水舱内的压载水,有
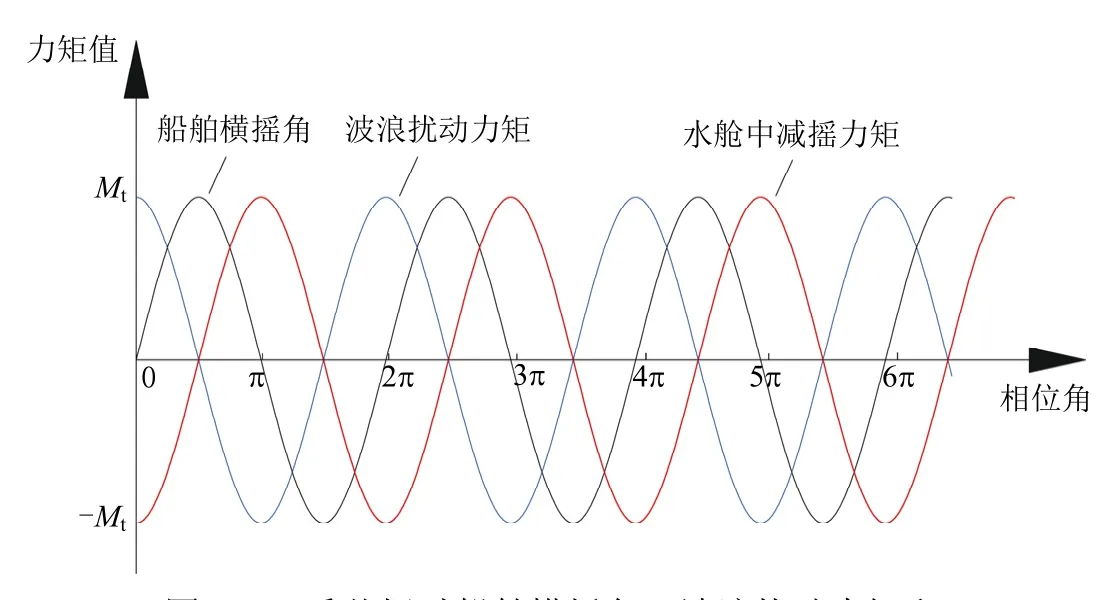
图1 双重共振时船舶横摇角、波浪扰动力矩和水舱内水流对船舶的减摇力矩三者之间的相位关系

2) 对于船壳,有

式(1)和式(2)中:φ为船的横摇角度;2φν为船的横摇衰减系数;φω为横摇自然频率;μ为水舱自由液面稳性修正因子;ω为来浪圆频率;eθ为来浪有效波倾角;δ为水舱中流体相对于船体的有效倾角;tω为水舱内液面自然频率;2tν为水舱内液体摇荡衰减系数;H为水舱内流体平均液面与横摇纵轴线间的距离。式(1)中的˙为水舱中流体的平移加速度,由船体横摇加速度引起。
定义φa/θe为横摇放大因数,εφξ为船体横摇滞后于波浪的相位角,εφδ为水舱中流体滞后于船体运动的相位角。由式(1)和式(2)可求得横摇放大因数和滞后相位角为
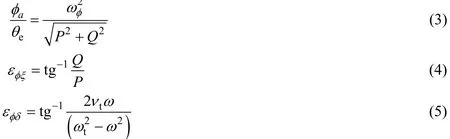
式(3)和式(4)中的P和Q分别满足
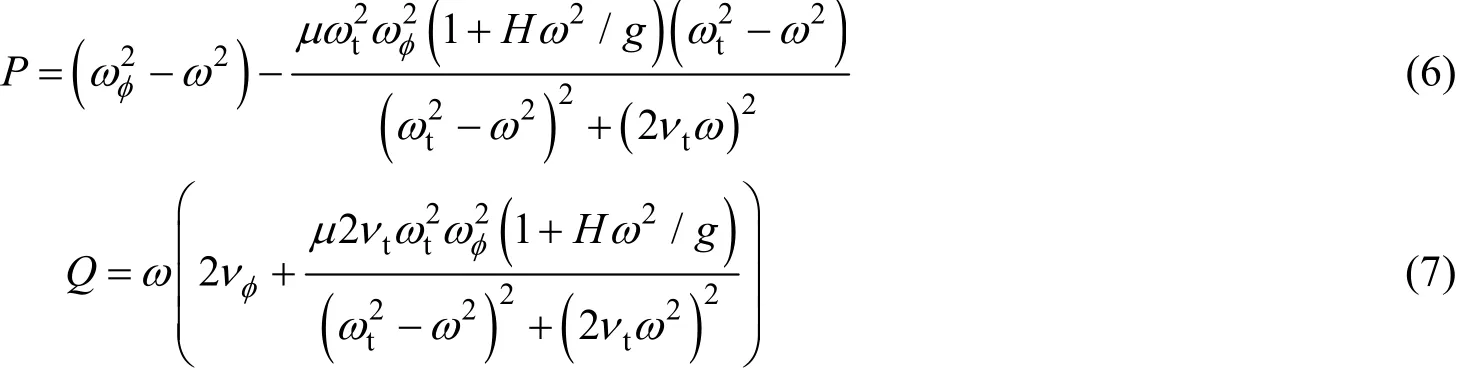
在获取船体和水舱的主尺度要素之后,可由式(3)~式(7)求出船体的横摇响应幅值算子。
船舶的横摇自然频率φω既可由船模试验确定,又可由式(8)确定,即

式(8)中:D为船舶排水量;h为船舶初稳性高;为船体自身惯性矩与附加惯性矩之和,即总惯性矩。

古德雷奇法[2]认为ωφ和ωt的计算式可表示为

1.2 贝胥法研究矩形减摇水舱
若本文中减摇水舱内的流体对船体的作用力矩由船模试验测定,则水舱内流体的运动方程式无须考虑;在贝胥法中,当仅考虑船体绕通过重心的纵向中心轴横摇运动时,可在船体的横摇运动方程式中体现水舱中流体力矩项,即

式(11)中:I1为船体质量惯性矩(含附加质量);2Nφ为船体横摇阻尼系数;Ks为船体横摇复原系数;φ为船舶横摇角;ω为来浪圆频率;Mω为波浪扰动力矩;Mt为水舱力矩。

式(13)中:Kt为水舱内流体对船体复原力矩的贡献系数;2Nφδ为水舱内流体对船体的横摇阻尼贡献系数。将式(12)和(13)代入式(11)中,定义kt=Kt/Ks,消去式中的I1项,整理后得到

式(14)中:2νφ为船体横摇衰减系数;2νφδ为水舱流体横摇衰减系数。由式(14)可得减摇水舱装载后的横摇幅值放大因数为

由式(15)可知,在求得 2 (νφ+νφδ)和kt之后,即可得到船体横摇幅值与来浪有效波倾角的比值,即船体横摇幅值放大因数。船体自身的横摇衰减周期和减摇水舱内流体的横摇衰减周期均可通过船模试验测得。
2 减摇水舱设计
2.1 水舱布置和内部设置
由式(13)可知:水舱内流体对船体复原力矩的贡献系数Kt越大,抵消横摇力矩就越大,因此一般将减摇水舱设置在远离横摇中心轴的位置;同时,需考虑初稳性高的因素,即船体重心位置越高,就越低;综合考虑,一般将矩形减摇水舱布置在主甲板下,且为获得较大的φ˙,使减摇水舱沿船宽方向的尺度尽可能地大。
本文中6500HP油田守护船主尺度和相应船模尺度参数见表1。

表1 6500HP油田守护船主尺度和相应船模尺度参数
减摇水舱的基本结构和安装位置见图2。该减摇水舱为矩形,沿船长方向并列布置2个水舱;水舱的尺寸为3.0m×3.0m×14.8m,在主甲板下贯穿船宽方向。减摇水舱模型采用透明的有机玻璃制作,以便清晰地观察舱内液体的运动状况;船底两侧舭部带有舭龙骨。
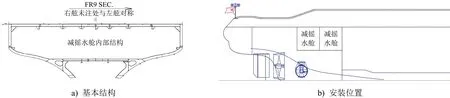
图2 减摇水舱的基本结构和安装位置
模型试验的内容包括减摇水舱模型的岸上试验、船模的静水衰减试验、减摇水舱开启和闭合状态的横浪规则波试验及减摇性能的计算预报。试验模型的缩尺比为1:20,船模采用木质材料制造,有机玻璃减摇水舱模型嵌入式安装在船模内部。模型试验在上海交通大学的船模拖曳水池中完成。
2.2 减摇水舱周期和阻尼系数
设计方案通过减摇水舱岸上试验(摇摆台试验)获取减摇水舱固有周期和阻尼系数;只对一个水舱加水,另一个保持空舱。在试验过程中对舱内自由液面施加初始扰动,通过安装在舱内的水位计测量并记录自由液面的运动衰减曲线,可获得减摇水舱的固有周期和阻尼系数,推导如下。
假定水箱横摇衰减曲线见图3。在图3中,假定阻尼线性变化,从t1到t2=t1+Tφ′/ 2半个周期的时间间隔内,横摇幅值的绝对值变化[9]为
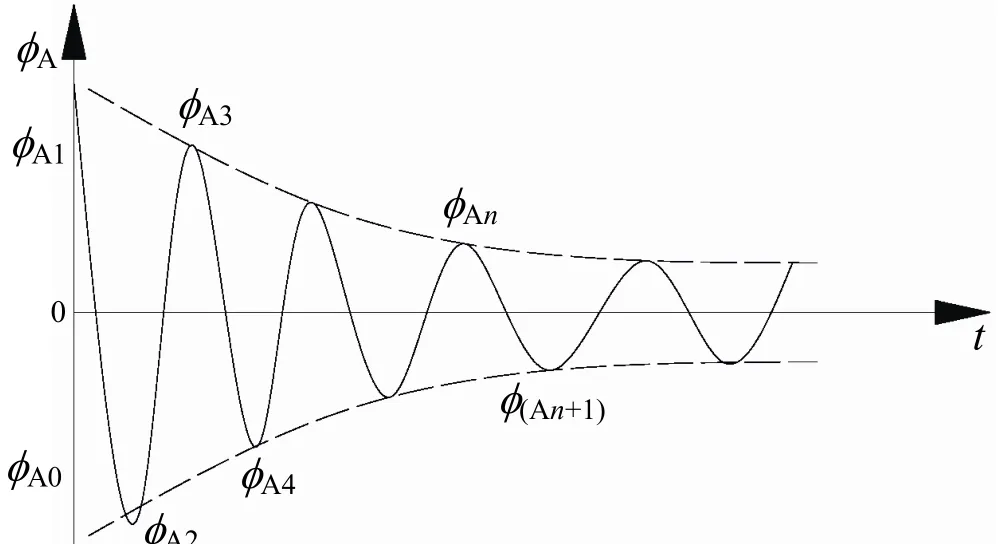
图3 水箱横摇衰减曲线


摇摆台试验是将减摇水舱固定安装在减摇台上,通过电机控制完成规定周期和规定幅度的简谐摇摆运动,测量得到减摇水舱对转动轴的横摇力矩和相位。将该数据与船舶原有横摇RAO曲线[3]相结合,可预报减摇水舱装船之后的减摇RAO曲线。试验时在设定安装高度的摇摆台(转动轴即为船舶重心)上固定住减摇水舱,在不同的设定周期下用电机驱动摇摆台做经过水平角度为原点的小角度简谐振荡,检测并记录3组时历数据,分别为摇摆台横摇角度、水舱内两侧水位高和摇摆台产生的横摇力矩。
对上述数据进行后处理,并将结果换算到实船尺度。试验设置3组水舱水位和3组激励横摇角,试验状态见表2。

表2 试验水位和激励横摇角记录
每组测试设置10个转速,对应实船周期为5.7~10.86s;本文在6个状态的试验结果中选取状态1情况,具体见表3和图4。

表3 状态1试验结果

图4 状态1减摇力矩和相位差随横摇周期变化情况
根据不同舱内水位下的横摇衰减曲线,由式(17)得到的实尺度自由衰减周期和无因次阻尼结果见表4。

表4 减摇水舱自由衰减测试数据
2.3 船模横摇固有周期和横摇黏性系数
船模通过压载调整和倾斜试验,保证吃水、浮态和横稳性高度符合表1的要求。减摇水舱内无自由液面,完成横摇静水衰减试验,得到船模在无减摇状态下的固有周期和阻尼数据。测试得到的船模横摇衰减曲线见图5,得到实尺度横摇固有周期为8.13s,实尺度横摇黏性系数υ=0.022,相关定义[3]为

3 减摇水舱系统效果评估
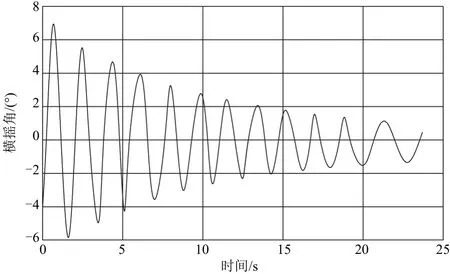
图5 船模横摇衰减曲线
3.1 规则横摇波预报
规则横摇波在上海交通大学船模拖曳水池中实现。该拖曳水池全长110m,宽6m,深3m。水池一端的造波装置可生成规则长峰波和非规则长峰波,船模与水池中线垂直放置,来波为横向规则波。船模艏艉两端分别用柔性绳索与水池侧壁连接,限制船模艏摇,但具有横摇和横荡的自由度。
船模横摇信号采用安装在模型上的倾角仪测量;波浪信号采用安装在离船2m位置处的浪高仪测量。所有测量器件都在试验前标定,零值对应于静水状态输出值。试验测量时,所有信号都以50Hz频率采样记录。
模型尺度数据可根据相似律换算成实船数据,试验中各物理量的换算关系见表5,所有试验数据都以实船数据的形式表达。

表5 实船数据换算关系
3.2 横摇RAO分析
采用频域分析方法进行规则横摇波试验,在系列规则波中试验结果的一般表达为横摇响应幅值算子RAO[3],定义为横摇幅值与波浪幅值的比值。横摇RAO值随波浪周期或波频变化的曲线称为RAO曲线。横摇 RAO曲线既能用来预报不同波浪谱中的横摇统计值,又能直观反映减摇水舱的减摇性能。
横摇规则波试验状态见表6,在同一浪向下分别完成减摇水舱关闭和开启的2组规则波试验,得到横浪状态下的横摇RAO曲线对比见图6。2种状态下的横摇规则波试验结果分别见表7和表8。
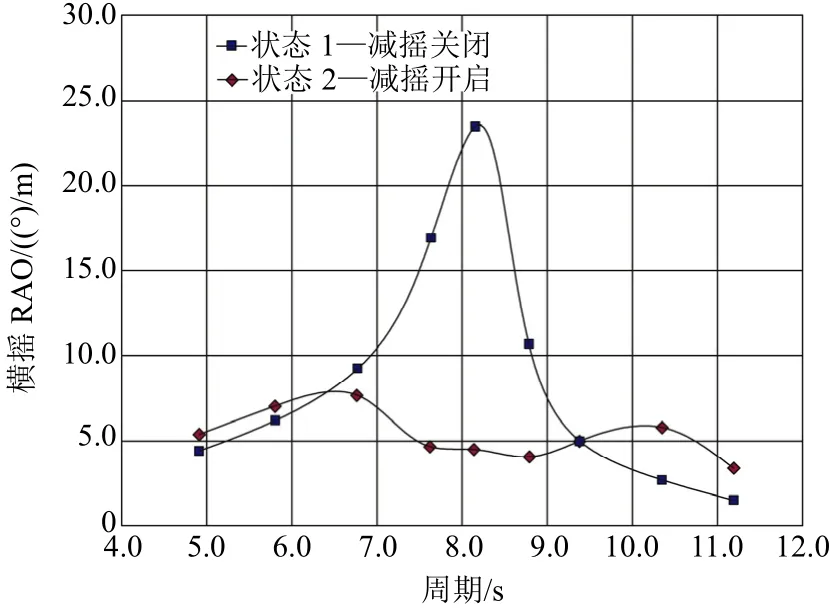
图6 横浪状态下的横摇RAO曲线对比

表6 横摇规则波试验状态

表7 状态1的横摇规则波试验结果

表8 状态2的横摇规则波试验结果
3.3 非规则波中横摇响应预报
根据船舶响应的线性假设,可采用频谱计算方法预报运动响应的有义双幅值。当波浪谱和运动响应算子RAO已知的时,运动响应的频谱的计算式[5]可表示为

若运动响应频谱曲线与横轴之间封闭区域的面积为m0,则运动响应的有义双幅值Re的计算式可表示为

根据表7和表8中的数据,可计算得到在不同海浪中减摇关闭和减摇开启2种状态对应的横摇有义值对比见表9。

表9 横摇有义双幅值对比
3.4 试航数据评估非规则波横摇响应
试航海域为舟山北部海域,浪高1.4~2.0m(4级,中浪),谱峰周期7.2s;倾角通过悬挂于船舶驾驶室的倾斜仪测量,抗横摇水舱系统控制面板位于船舶驾驶室前驾控台,通过放置在水舱内的液位计和陀螺仪实时监测船体的状态和水舱液位状态;经数据整理,选取0~4kn航速数据和12kn航速数据,得到试航减摇效果见表10。

表10 试航减摇效果
由表10可知:在低航速(0~4kn)下,减摇水舱系统实际减摇效果为50%,与非规则波横摇响应预报结果53%非常接近;在高航速(12kn)下,减摇水舱系统实际减摇效果47%,与理论预报结果53%相差较小,且亲身体验水舱工作时的横摇角度在可接受的范围内。由此可知:6500HP项目的减摇水舱系统设计是成功的。
4 结 语
根据模型试验结果和横摇预报结果,可得到以下结论:
1) 从横摇RAO曲线对比中可看出,减摇水舱开启可有效改善船舶横摇性能。
2) 从横摇预报结果来看,在4级浪和5级浪状态下,减摇水舱开启后的减摇效果可达到50%以上;从实际试航结果来看,减摇效果非常接近50%。
3) 从减摇水舱自由衰减结果中可看出,减摇水舱自由衰减周期对舱内水位高度相当敏感。因此,在船舶装载状态变化的情况下,必须及时调整水位,以保证减摇水舱周期与船舶横摇固有周期匹配。
【 参 考 文 献 】
[1] 李积德. 船舶耐波性[M]. 哈尔滨:哈尔滨工程大学出版社,1992.
[2] 陶尧森. 船舶耐波性[M]. 上海:上海交通大学 1985.
[3] 肖龙飞,彭涛,杨建民,等. 被动式减摇水舱减摇效果的评定[J]. 上海:上海交通大学学报,2001 (10): 1552-1556.
[4] 肖丽娜. 平面被动槽型减摇水舱的研究[D]. 大连:大连理工大学,2005.
[5] 谢广东. 船舶减摇水舱舱液振荡周期和阻尼特性的研究[D]. 哈尔滨:哈尔滨工程大学,2011.
[6] 洪超,陈莹霞. 船舶减摇技术现状及发展趋势[J]. 船舶工程,2012, 34 (S2): 236-245.
[7] 张松涛. 减摇水舱优化设计及试验研究[D]. 哈尔滨:哈尔滨工程大学,2006.
[8] 吴文成,邹康. 深水供应船耐波性及减摇效果研究[J]. 船舶与海洋工程,2016, 32 (1): 36-40.
[9] 盛振邦,刘应中. 船舶原理[M]. 上海:上海交通大学 2003.
猜你喜欢
船舶物资与市场(2022年8期)2022-11-26
舰船科学技术(2022年11期)2022-07-15
新视线·建筑与电力(2021年2期)2021-09-10
直升机技术(2020年2期)2020-06-16
船舶标准化工程师(2019年4期)2019-07-24
中学科技(2018年6期)2018-09-21
山东青年(2016年12期)2017-03-02
小学生时代·大嘴英语(2014年6期)2014-11-04
航海(2014年4期)2014-08-28
中学生数理化·八年级物理人教版(2014年2期)2014-04-02
